具有铰接臂及储层表征和绘图能力的激光钻孔工具的制作方法
具有铰接臂及储层表征和绘图能力的激光钻孔工具
1.相关申请的交叉引用
2.本技术要求2019年6月12日提交的标题为“具有铰接臂和储层表征及绘图能力的激光钻孔工具(laser drilling tool with articulated arm and reservoir characterization and mapping capabilities)”的第16/439,383号美国专利申请的优先权和权益,该申请的公开内容以全文引用的方式并入本文中。
技术领域
3.本技术涉及激光工具以及用于使用高功率激光器激发含烃地层的相关系统和方法。
背景技术:
4.钻井孔激发是石油工程的一个分支,主要研究如何增加从地层到钻井孔的碳氢化合物流量,以进行生产。为了从目标地层产出碳氢化合物,地层中的碳氢化合物需要从地层流向钻井孔,以便产出并流向地面。从地层到钻井孔的流动通过地层渗透性实现。当地层渗透性较低时,激发会被用来增加流量。可在钻井孔周围及进入地层中进行激发,以在地层中建立网络。激发的第一步通常是将套管穿孔和固井,以便到达地层。将套管穿孔的一种方式是使用聚能装药。将聚能装药下放到钻井孔中至目标释放区。聚能装药的释放会产生穿过钢套管、水泥并进入地层的短隧道。
5.使用聚能装药有一些缺点。例如,聚能装药会在隧道周围形成一个致密区域,这会降低渗透性,并且因此降低产量。聚能装药的高速冲击会压碎岩层,产生堵塞地层的孔喉的非常细的颗粒,从而降低流量和产量。隧道内有可能形成熔体。通过聚能装药产生的隧道的几何形状和方向无法控制。隧道的穿透深度和直径受到限制。在地面处理爆炸物时存在风险。
6.激发的第二阶段通常涉及通过聚能装药产生的隧道泵送液体。液体以超过地层破裂压力的速率进行泵送,使得地层和岩石断裂,这称为水力压裂。水力压裂主要使用称为水力压裂液的水基液体进行。水力压裂液会损害地层,尤其是页岩。水力压裂会在地层中产生裂缝,从而在地层和钻井孔之间形成网络。
7.水力压裂也有几个缺点。首先,如上文所提到,水力压裂可能会损害地层。另外,裂缝方向无法控制。众所周知,裂缝会闭合。由于管道中的水压力很高,地面会存在风险。还存在与添加到水力压裂液中的成分有关的环境问题,以及水力压裂所需的数百万加仑水的需求。
8.高功率激光系统也可用于井下应用,例如通过激光钻掘一个干净的受控的孔来激发地层。激光钻孔通常节省时间,因为激光钻孔不像传统钻孔那样需要管道连接,它是一种更环保的技术,因为激光器是电力驱动的,排放量要少得多。但是,在定位和操纵激光工具以实现有效井下使用方面仍然存在限制。
技术实现要素:
9.在地层中钻孔的常规方法一直拘于通过使用机械力来旋转钻头。这种方法的问题包含损害地层、损害钻头,以及难以更精确地操纵钻孔组件。此外,钻掘坚硬地层的过程非常困难、缓慢且昂贵。然而,激光技术的当前技术水平可以用来应对这些挑战。一般来说,由于激光提供热输入,它会破坏颗粒之间的粘结和胶结,并将它们推开。钻掘坚硬地层将更容易、更快,部分原因是所公开的方法和系统将不再需要在钻头磨损后将其从钻井孔中拔出进行更换,并且无论其抗压强度如何,都可以钻穿任何地层。
10.本公开涉及新的用于使用高功率激光能量在地下地层中钻孔的工具和方法。具体地说,所公开的工具和方法的各种实施例使用高功率激光器,其激光源(发生器)位于地面上,通常位于钻井孔附近,其中能量通过激光工具经由光纤线缆等光传输介质沿钻井孔向下传送到井下目标。一般来说,在本技术中描述的工具可在任何方向上进行钻孔、穿孔和定向。工具包含用于高清测量和记录关于地层信息的构件,例如,如果存在盐丘,那么所述工具将基于速度发送声波,所述工具将引导以追踪代表盐丘边界的相同速度。高清储层表征基于现场和实际测量,而不是软件和相关性预测。通过对地层性质的实时反馈,可以立即做出钻井和完井决策。可经由所包含的声学相机提供钻孔和穿孔时的实时声学图像。
11.通常,激光产生单元配置成产生高功率激光束。激光产生单元与光纤线缆电连通。光纤线缆配置成传导高功率激光束。光纤线缆包含配置成耐高温和高压的绝缘电缆、配置成传导高功率激光束的保护性激光光纤线缆、配置成接收高功率激光束的激光地面端、配置成从光纤线缆发射原始激光束的激光线缆端。在一些实施例中,系统包含可选的外部套管或外壳,它们被放置在延伸于含烃地层内的现有钻井孔内,以进一步保护构成激光工具的光纤线缆、电力线或流体线。
12.在各种实施例中,激光工具包含光学组件,所述光学组件配置成对激光束进行整形以用于输出。激光束可具有至少一千瓦(1kw)的光功率。在一些实施例中,激光束具有多达10kw的光功率。激光工具提供在钻井孔和地层之间钻孔、穿孔和建立通信的构件,以实现最大化的产量和表征。它是一种集成工具,组合了高功率和低功率激光器(光纤感测)、定向构件、声学相机、光学组件和被称为“蛇”的铰接式机器人臂。无论岩石强度、应力方向或地层类型如何,这个工具都能够在任何方向和长度上钻孔并对地层表征。
13.所公开的工具和方法为井下激发提供了非破坏性替代技术,可在任何方向穿透,并在穿透时评估地层。所公开的工具和方法可以改善钻井孔和含烃地层之间的连通,从而改善生产和地层特征。光纤线缆可嵌入铰接式机器蛇中,此机器蛇可由电力或液压/气动控制装置提供动力。
14.一方面,本技术涉及一种用于激发含烃地层的系统。具体为配置成在岩层内的钻井孔的井下环境中使用的激光穿孔工具。所述工具包含配置成对钻井孔进行穿孔的穿孔构件,其中所述穿孔构件包含一个或多个光传输介质,所述光传输介质是源自配置成产生原始激光束的激光产生单元的光学路径的一部分。所述一个或多个光传输介质配置成传递原始激光束。所述工具还包含激光头,所述激光头联接到所述一个或多个光传输介质且配置成接收原始激光束,其中激光头包含用于控制输出激光束的至少一个特征的光学组件。
15.所述工具的额外特征包含:冲洗组件,所述冲洗组件至少部分地设置在激光头之内或邻近激光头,且配置成将冲洗流体递送到输出激光束附近的区域;多个定向喷嘴,所述
多个定向喷嘴围绕激光头的外周设置,其中所述多个喷嘴配置成控制激光工具在钻井孔内的定向;以及控制系统,所述控制系统用于控制激光头的运动或位置或者光学组件的操作中的至少一个,以在钻井孔内引导输出激光束。
16.在上述方面的各种实施例中,光学组件包含:分光棱镜,所述分光棱镜配置成接收原始激光束并将原始激光束分成一个或多个光束;以及准直器,所述准直器设置在棱镜下游,且配置成接收所述一个或多个光束并产生具有特定大小或形状的输出激光束。光学组件还可包含至少一个额外透镜,所述至少一个额外透镜设置在棱镜和准直器之间,用于基本上垂直于激光头的中心轴或相对于激光头的中心轴倾斜地递送输出光束。
17.在一些实施例中,准直器配置成基本上平行于激光头的中心轴递送输出激光束。在各种实施例中,准直器配置成递送发散光束、会聚光束或聚焦或准直光束中的至少一个。
18.在各种实施例中,冲洗系统包含多个冲洗喷嘴,所述多个冲洗喷嘴设置在输出激光束附近且连接到冲洗流体供应源。冲洗喷嘴配置成将冲洗流体递送到输出激光束附近的区域。在一些实施例中,冲洗喷嘴的至少一部分是真空喷嘴,所述真空喷嘴连接到真空源且配置成从输出激光束附近的区域去除碎屑和气态流体。
19.在一些实施例中,所述多个定向喷嘴是冲洗喷嘴,所述冲洗喷嘴配置成向激光头提供推力,使得激光头在钻井孔内移动。所述多个定向喷嘴可移动地联接到激光头,以便定向喷嘴能够相对于激光头旋转或枢转,以提供激光头相对于钻井孔的前向运动、反向运动、旋转运动或其组合。
20.在又一个其它实施例中,所述工具包含设置在激光头和激光产生单元之间的铰接臂。铰接臂可包含设置在光传输介质周围的多个保护耦合器。在一些实施例中,柔性外部套管设置在所述多个保护耦合器周围。铰接臂可包含蛇形机器人,所述蛇形机器人具有用于在钻井孔内操纵所述工具的运动构件。运动构件可包含电动机或液压致动器中的至少一个。
21.在额外实施例中,所述工具包含扶正器,所述扶正器联接到所述工具且配置成在钻井孔中相对于外部套管将所述工具固定到位。扶正器可包含多个可膨胀封隔器。
22.在其它实施例中,所述工具包含至少一个声学相机,所述至少一个声学相机联接到所述工具且配置成传递在激光头附近的区域的图像。在一些实施例中,所述至少一个声学相机设置在激光头的外周上。声学相机还可配置成表征地层。
23.另一方面,本技术涉及一种使用激光工具激发含烃地层的方法。所述方法包含以下步骤:通过一个或多个光传输介质传递由光学路径起点处的激光产生单元产生的原始激光束,所述光学路径包含光传输介质;经由铰接臂在含烃地层内的钻井孔内定位激光工具,其中激光工具联接到激光产生单元;使用围绕激光头的外周设置的多个喷嘴在钻井孔内定向激光工具的激光头;将原始激光束递送到设置在激光头内的光学组件;利用光学组件操纵原始激光束以产生输出激光束;以及将输出激光束递送到地层。
24.在各种实施例中,所述方法包含以下步骤:使用所述一个或多个声学相机对在激光头附近的区域进行成像。所述方法还可包含以下步骤:使用所述一个或多个声学相机表征地层。
25.定义
26.为了使本公开更容易理解,下面首先对一些术语进行定义。下述术语和其它术语
的额外定义将在整个说明书中加以阐述。
27.在本技术中,除非自上下文可知为其它情况,否则术语“一”可理解为意指“至少一个/一种”。如本技术中所使用,术语“或”可理解为意指“和/或”。在本技术中,术语“包括”和“包含”可理解为涵盖详细列举的组件或步骤,无论是单独呈现还是连同一个或多个额外的组件或步骤一起呈现。如本技术案中所使用,术语“包括(comprise)”和该术语的变体(例如“comprising”和“comprises”)并不意图排除其它添加物、组件、整数或步骤。
28.约、大致:如本文中所使用,术语“约”和“大致”等同使用。除非另外说明,否则术语“约”和“大致”可理解为允许存在所属领域的一般技术人员所理解的标准偏差。在本文提供范围的情况下,端点被包含在内。本技术中结合或未结合约/大致使用的任何数字均意图涵盖相关领域中一般技术人员所了解的任何正常波动。在一些实施例中,除非另行说明或上下文中显而易见(此类数字超过可能值的100%除外),否则术语“大致”或“约”是指在所述参考值的任一方向上(大于或小于)与其相差不超过25%、20%、19%、18%、17%、16%、15%、14%、13%、12%、11%、10%、9%、8%、7%、6%、5%、4%、3%、2%、1%或更小的一系列值。
29.在钻井孔附近:如本技术中所使用,术语“在钻井孔附近”是指钻井孔中或钻井孔周围岩层的区域。在一些实施例中,“在钻井孔附近”是指邻近钻井孔开口的地面区域,并且可与钻井孔相隔例如不到35米(m)(例如,与钻井孔相隔不到30米、不到25米、不到20米、不到15米、不到10米或不到5米)。
30.基本上:如本文中所使用,术语“基本上”是指展现感兴趣的特征或性质的全部或接近全部范围或程度的定性条件。
31.周界:如本文中所使用,术语“周界”是指物体的外边界或周边,而不管其形状如何,例如,不管它是圆形、卵圆形、矩形还是这些形状的组合。
32.所公开的系统和方法的这些和其它目标连同其优点和特征将通过参考以下描述和附图而变得显而易见。此外,应了解,所描述的各种实施例的特征不是相互排斥的,并且可按各种组合和排列存在。
附图说明
33.在附图中,相似的参考标号在不同视图中通常是指相同的部分。另外,附图未必按比例绘制,重点反而主要在于示出所公开的系统和方法的原理,而非意在限制。为清楚起见,可能没有在每个附图中都标记出每个组件。在以下描述中,参考以下各图描述各种实施例,附图中:
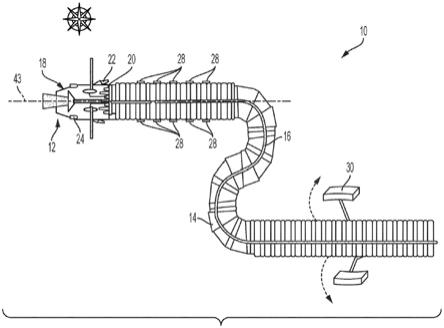
34.图1是根据一个或多个实施例的光纤激光穿孔工具的一部分的简化图;
35.图2是图1的光纤激光穿孔工具中根据一个或多个实施例的激光头的放大侧视图;
36.图3a-3c是可以通过图1的光纤激光穿孔工具中根据一个或多个实施例的激光头内的光学组件传输的各种类型的光束的简化图;
37.图4是图1的光纤激光穿孔工具中根据一个或多个实施例的激光头的驱动系统的一部分的简化图;
38.图5是根据一个或多个实施例的用于光纤激光穿孔工具的铰接式机器人臂的图形表示;
39.图6a-6c是根据一个或多个实施例的与光纤激光穿孔工具一起使用的蛇形机器人的示意图;
40.图7是与图1的光纤激光穿孔工具中根据一个或多个实施例的铰接式机器人臂一起使用的柔性套管的图形表示;
41.图8是示出根据一个或多个实施例设置在地层内的钻井孔内并使用的光纤激光穿孔工具的简化图;以及
42.图9是根据一个或多个实施例的由光纤激光穿孔工具产生的地层断层摄影图像。
具体实施方式
43.图1描绘光纤激光穿孔工具10的一部分,此工具配置成通过任何服务提供商使用本领域已知的盘管单元、缆线或牵引器下降到井下。工具10包含有时被称为“蛇形机器人”(参见例如图5)的铰接臂14以及激光头12,所述激光头容纳光学组件18的至少一部分;并且包含多个定向喷嘴22和冲洗系统20。工具10还包含可膨胀封隔器30,用于扶正工具10并将一个区域(如果在到达目标后需要在此区域执行特定任务)隔离开来。封隔器30可根据需要沿臂14布置在各个点处,以适配特定应用。封隔器或扶正器30支撑工具主体的重量,并且可根据需要沿工具10间隔开,以便工具10在地层中延伸得更深。封隔器30还可为柔性的,使得工具10在封隔器膨胀时能够从中滑动通过。封隔器30不限于湿膨胀的弹性材料,还可包含可从地面进行液压或气动充气或者通过其它机械方式进行充气的气囊。
44.线缆16设置在臂14内,并且可包含光传输介质(例如,光纤),并根据需要包含任何电力线或流体管线,以操作工具10。线缆16从设置在地面上的激光产生单元148(见图8)延伸到激光头12。激光头12(或臂14的一部分)可包含一个或多个用于温度和压力记录的低功率光纤传感器28,以及位于激光头12的周界周围的一个或多个声学相机24。相机24的功能是使激光头12和周围区域可视化,以及表征地层。典型的井下相机会由于钻井孔中的流体和污染物而无法工作。从声学装置24采集的数据(除图像外)是声波在地层中传播和反射的速度,可用于计算地层的机械性质、预测地层稳定性、评估工具性能以及支持工具定向和故障排除。激光头12参照图2更详细地进行了描述。
45.一般来说,声学感测可在钻孔时提供信息,并通过测量地层密度来引导工具(类似于地质导向)。在知晓密度后,地层和结构也会获知。集成的声学装置提供高清储层表征和绘图(见图9)。例如,在工具10穿过地层时,工具将实时数据发送到地面给操作者,操作者可教导工具10保持在特定密度范围,例如在2.2到2.6克/立方厘米(g/cc)之间的砂岩密度范围,而不穿透其它范围,由此工具将遵照教导并仅穿透砂岩,同时提供砂岩结构的绘图。声学装置还经由声学相机24提供视觉。这些特征使工具10能够仅针对碳氢化合物区。并且,通过声学装置提供的信息可用于计算地层的机械性质并产生断层摄影图像。机器学习也可用于“教导”工具如何通过声学装置24和光纤传感器28提供的信息自行导航穿过地层。
46.工具10可进行编程,以在指定岩石密度下导航和钻孔,其中声学感测和声波用作监控工具来操纵蛇14。具体而言,工具10将发送和接收声波,并且根据速度差异,工具可被引导到目标地层或识别特定地下结构,因为数据是直接发送到地面以控制蛇形机器人,或者蛇形机器人可以预先编程以分析速度并基于这些声波进行操纵。
47.另外,声学装置24和光纤传感器28可用于进一步表征地层的各个特征,例如硬度、
组成、密度、温度等。为了解释得更详细,声学装置测量岩石机械性质,在流体和岩石环境中产生图像(例如超声波和三维图像),确定饱和度水平以及流体多相特征。光纤传感器28可在钻孔时进行温度和压力测量。光纤传感器28可感测地层温度,例如岩石表面温度,以确定它是否因激光而过热,如果过热,激光将关闭以保护工具10。在各种实施例中,传感器还可监测钻井孔中的一个或多个其它环境条件或工具10的一个或多个条件,例如工具10的表面温度、钻井孔壁的机械应力、工具10上的机械应力、钻井孔中的流体流量、钻井孔中碎屑的存在情况、钻井孔中的压力,或者辐射、磁场。
48.图2更详细地描绘激光头12。如图所示,头12包含光学组件18、冲洗组件20和定向喷嘴22。一般来说,激光头12包含保护性外壳44,根据一些实施例,保护性外壳是一种由玻璃或蓝宝石材料形成的透明外壳。在一些实施例中,仅外壳44的远端46是透明的或者包含用于发射输出光束40的透镜盖。另外或替代地,外壳44可包含设置在其一侧以垂直于工具10的中心轴43引导输出光束40的至少一个窗。线缆16的原始激光输出端可操作地连接到外壳44内的光学组件18。光学组件18用于对输出激光束40整形并将其递送到钻井孔。
49.设置在激光头12内的是用于聚焦和瞄准激光束40的方向的至少一个激光束引导构件。一般来说,原始激光束17离开线缆16并进入分光棱镜34,光束17可以通过使用额外的分光器或聚焦透镜38分成不同数目的光束,以便进行侧穿孔。光束17还可通过穿过分光器34进入到准直器或聚焦透镜36中来直线传播。另外或替代地,可以使用另一光纤线缆16来适应不同应用。通常,光纤线缆16的尺寸极小,控制输出光束尺寸以获得不同的光束尺寸、形状或这两者。各种光束尺寸/形状40在图3a-3c中示出。
50.图3a描绘一个实施例,其中输出光束40a已被调节用于发散(圆锥状,其中大的底部投影在工具头前方)以形成大于工具10的孔,因此工具可以在钻井孔内前进。图3b描绘一个实施例,其中光束40b已被调节为聚焦或会聚(圆锥状,其中小的或聚焦的形状投影在工具头前方)以在随后使用发散继续钻孔之前使工具头穿孔或削弱地层。图3c描绘一个实施例,其中光束40c已被准直(光束具有基本上恒定的直径)以钻掘一个直孔到达目标,而无需向前移动工具。
51.光学组件18可包含额外的引导构件,例如至少一个可移动反射器/反射镜或一个或多个可调整透镜,使得激光束40能够精确聚焦和定向。应注意,使用和设置激光头12内的反射器和透镜的唯一要求是它们的布置准许借助透镜和反射器的旋转或调整在任何方向上拆分和/或重新引导原始激光束。
52.工具10的一个特征是它对激光头12在钻井孔内的运动和位置的精确控制。图2和4描绘用于在钻井孔内对工具10(具体为激光头12)进行定位和定向的构件。工具10还可经由蛇形机器人14定位和定向。还提供用于感测工具10在钻井孔内的定向和位置的构件,此类构件包含先前描述的各个传感器和成像。
53.在示出的实施例中,定向构件包含围绕激光头12的外周设置的多个喷嘴22。喷嘴22可经由已知的机械构件26联接到激光头外壳,机械构件可以是固定的(例如,经由紧固件或粘合)或可移动的(例如,经由球形接头或伺服电机)。通常,喷嘴22将可移动地联接到激光头12,并经由控制系统控制以便向激光头12并进一步向工具10提供前向、反向或旋转运动。
54.一般来说,工具10/头12通过控制流经喷嘴22的流体(液体或气体)流来定向。例
如,如图4中所示,通过在后向方向42上引导流体流,工具10将利用推力作用在钻井孔中向前推动,其中喷嘴22的开口45朝向工具头12的相反方向,并且流体向后流动,从而提供向前移动工具10的推力。控制流速将控制钻井孔内工具10的速度。用于提供推力的流体可从地面供应,并通过包含在线缆16内的流体线递送。
55.如图4中所示,存在四(4)个喷嘴22a、22b、22c、22d,它们在激光头12周围均匀间隔开。每个喷嘴22使流体流动以允许工具移动,并且可以单独控制。例如,如果喷嘴22a是唯一打开的喷嘴,那么工具10将向南转动,转动程度取决于来自所述喷嘴22a的受控流速。如果所有喷嘴22均匀打开,那么工具将根据喷嘴22的位置线性地向前或向后移动。
56.如先前所提及,喷嘴22可以可移动地安装在激光头12上,例如通过带有旋转接头的伺服电机,所述旋转接头可控制喷嘴端部45是朝后(前向运动)、朝前(反向运动)还是与中心轴43成一角度(旋转运动或线性和旋转运动的组合,取决于喷嘴22相对于中心轴43的角位移)。例如,如果喷嘴22垂直于中心轴对准,那么喷嘴22将仅提供旋转运动。如果喷嘴平行于中心轴43,那么喷嘴22将仅提供线性运动。至于相对于中心轴43的任何其它角位置则提供了旋转和线性运动的组合。
57.用于提供推力的流体线可经由本领域中已知的旋转耦合器联接到喷嘴。另外,在一些实施例中,工具10将从地面上的盘管单元获得支持来移动,例如,在工具10的重量太重而不能仅依靠定向喷嘴22和可能的封隔器30的情况下。
58.返回参考图2,冲洗组件20包含多个冲洗喷嘴32,这些冲洗喷嘴设置在激光头12附近且配置成从激光头外壳44的外表面和激光头12附近的区域去除粉尘或其它颗粒,从而清理激光束40的路径,这是因为碎屑会吸收能量,导致递送到地层的能量减少。另外,碎屑可能污染切割区域并损坏激光头12或干扰、弯曲或散射激光束40。合适的冲洗流体可以是气体(如高压空气)或液体。冲洗流体应对激光束波长透明。根据各种实施例,喷嘴32的至少一部分是真空喷嘴,它们连接到真空源并且适配成从激光头12外部周围去除碎屑和气态流体。
59.图5和6描绘可以与工具10一起使用的铰接臂结构的示例。具体地说,图5描绘了一个实际的铰接机器人臂(照片由biorobotics.ri.cmu.edu提供),此机器人臂可以是“现成”的,用于到达人体与物质互动危险的位置,或例如海洋中的地下应用中。较小的机器人臂在医疗领域的应用非常广泛,且有许多公司生产这类蛇,如oc机器人公司:英国布里斯托尔市佛利顿,艾玛克里斯路,艾比伍德商业园5号楼(bs34 7ju)(oc robotics:unit5,abbey wood business park,emma-chris way,filton,bristol,bs34 7ju,uk),或日本的发那科(fanuc)或雅马哈(yamaha)公司。通常,蛇形机器人是一种细长的超冗余操纵器,其具有多个自由度,允许臂沿着路径或绕障碍物“蛇行”。
60.但是,这些标准或现成类型的产品不适用于井下应用,因其必须与传感器和机器学习结合才能适应本技术中公开的特定应用。例如,蛇需要更长的时间才能穿过地层,并且可能需要靠电池运行,以便不受任何绳索或附件的影响。图6a-6c描绘蛇形臂214的示例性实施例,其中图6a表示臂214的部分分解透视图,图6b示出臂214的精确操纵性,且图6c表示臂214的一个组件。
61.如图6a中所示,铰接臂214的内部配置包含多个保护性可操纵耦合器260,它们由加强支撑件264和互连的可由电或液压致动器驱动的柔性滑块266(见图6c)组成,以便在任
何方向上操纵和移动,从而提供铰接臂214的运动和定向。臂214还包含多个可伸缩外部覆盖物262,用来保护线缆218和其它穿过铰接臂的控件。
62.一般来说,这些臂214根据任何现有的、市售的蛇形机器人制造,例如可从oc机器人、发那科或雅马哈公司获得的蛇形机器人。在一些实施例中,修改包含将额外的接头/耦合器合并到蛇上以增加其长度,通过常规附接构件将传感器连接到耦合器,或通过耦合器扩大通道以便容纳光纤线缆。
63.臂214还可包含外壳或柔性护罩270,用于保护工具不受井下环境影响。蛇形机器人制造商使用各种不同的材料来制造这些外壳;图7中示出了柔性铝护罩270的示例。如图所示,护罩270不是蛇形机器人的一部分,只是一个防止污染物进入的保护壳。
64.所公开的具有铰接臂的激光工具的优点包含它可到达地层中的任何目标而不管地质结构、应力或岩石硬度如何,从而提供更快的钻孔速度,这是因为不需要套管或移动工具进出孔来更换钻头,它可以绕过非产区(如水),并直接瞄准产层,它可以连接不在同一方向上对齐的不同的分离的区域。图8中描绘了操作中的工具的示例。
65.图8示出部署在地层150内的钻井孔152内的根据一个或多个实施例的光纤激光穿孔工具110。在操作中,如先前所述,工具110定位在钻井孔152内,使得激光头可以定位在所需钻孔位置处。如先前所述,激光工具110联接到位于地面156上的激光产生单元148。通过此布置,工具的井下部分不存在诸如重量和尺寸之类的物理限制。
66.如图8中进一步示出,操作激光器以穿过钻井孔152的套管和水泥,在其中形成隧道158。工具110通过其铰接臂/蛇形机器人将激光头输送通过隧道158和可能遇到的每种类型的介质,从而能够形成显著更深的隧道158。除了能够钻更长的隧道158外,工具110还能够根据用于产生不同程度渗透性的激光功率作用于隧道158的表面。
67.对于需要高渗透性的应用,所用激光能量的功率和暴露时间必须足以蒸发遇到的地下介质以形成蒸发区。对于中等渗透性则使用较少的激光能量,这足以软化或熔化地下介质以形成渗透熔化区。为了使岩层150不可渗透则使用更少的激光能量形成密封区。这些不同级别的处理用于处理遇到的不同强度和稳定性的岩层。
68.此外,工具110可导航穿过地层150,以瞄准或避开不同区域154。如图所示,隧道158可在不规则路径下钻穿地层,这是因为蛇形机器人和声学装置将导航穿过地层150,例如避开水区154a,同时瞄准油区154b。具体而言,当工具110在地层150中钻孔时,它也在评估地层150,因此如果它感测到水区154a,那么工具可以通过蛇形机器人改变工具的钻孔方向以避开水区154a。工具110将继续钻孔,直至其到达也可通过集成声学装置确定的油区(或其它产层)154b。
69.图9描绘可经由集成于工具内的声学装置和其它传感器产生的断层摄影图像。具体而言,图9示出由地质特征和结构(例如多层282、穹隆284、薄层286中的烃、褶皱288、主要断层290、向斜292、多层理294和多断层296)组成的复杂地下结构的示例。这些储层不均匀性对当今绘制和表征储层的技术提出了挑战。所公开的工具和相关方法通过使用配备有(例如声学和光学感测的)感测和测量工具的铰接机器人臂来感测和表征地下地层来克服这些挑战。每一层的结构将具有不同的密度,声学装置将测量密度并引导机器人臂追踪特定密度(可以应用机器学习),以获得复杂结构的高清绘图。工具还可以提供循环记录,以确认工具收到的信息。
70.一般来说,常规记录方法涉及钻井和测井,然后解释日志之间的关系,发现地质构造并根据日志和井的数目预测进一步的结构。所公开的工具10、110配备有记录工具,例如可以提供温度和压力测量值的光纤传感器28和提供声波(例如剪切波(vs)和称为(vp)的纵波)速度的声学相机24。根据这些速度,可以计算地层的机械性质,以提供有关地层的信息,例如出砂、坍塌、压实、变形、弱或强地层、结构边界和形状,例如断层、褶皱、反倾斜和盐丘。工具10、110可感测这些信号,并将自身引导至要追踪的已知或编程速度;且据此可以获得高清储层地质结构(见图9)。此外,工具还可以钻掘圆形孔,这允许采用新的钻孔和测井方法,以实现最大的油井采收率和储层表征。这些结果的新术语是高清(hd)储层测量,它基于实际测量而非软件预测。
71.一般来说,井下激光工具的构造材料可以是任何类型的材料,这些材料可以耐受现有钻井孔内可能经历的高温、高压和高振动,并且可以保护系统免受流体、粉尘和碎屑的影响。耐硫化氢的材料也是可取的。本领域的普通技术人员将熟悉合适的材料。
72.激光产生单元可以将能量激发到高于含烃地层的升华点的水平,并作为原始激光束输出。本领域的技术人员可确定使含烃地层升华所需激光束的激发能量。在一些实施例中,可调谐激光产生单元以根据不同含烃地层的需要将能量激发到不同水平。含烃地层可包含石灰岩、页岩、砂岩或含烃地层中常见的其它岩石类型。释放的激光束可以穿透钻井孔套管、水泥和含烃地层以形成例如孔或隧道。
73.激光产生单元可以是能够产生高功率激光束的任何类型的激光单元,例如,镱、铒、钕、镝、镨和铥离子的激光器,所述高功率激光束可以通过光纤线缆传导。在一些实施例中,激光产生单元包含例如5.34-kw掺镱多包层光纤激光器。在一些实施例中,激光产生单元可以是能够以最小损耗递送激光的任何类型的激光器。激光产生单元的波长可由本领域的技术人员根据穿过含烃地层的需要确定。
74.在一些实施例中,将选择激光产生输出以适配特定的应用。例如,需要形成具有允许蛇形机器人通过的尺寸的孔。由于蛇形机器人连接到激光头,因此蛇形机器人的尺寸取决于激光功率,反之亦然。例如,10kw的激光器通常会产生一个4英寸的孔,因此蛇身的直径需要小于4英寸。然而,如果使用100kw的激光器,则将形成一个更大的孔,并且大得多的蛇是可能通过的。
75.激光工具的至少一部分及其各种修改可至少部分地由计算机程序产品控制,例如有形地体现在一个或多个信息载体中的计算机程序,例如体现在一个或多个有形机器可读存储介质中,以供数据处理设备执行或控制数据处理设备的操作,数据处理设备例如是本领域的普通技术人员熟悉的可编程处理器、一台计算机或多台计算机。
76.预期本技术的系统、装置、方法和过程涵盖使用随附描述中所描述的实施例的信息开发的变型和调适。本说明书中描述的方法和过程的调适或修改可由相关领域的一般技术人员执行。
77.贯穿说明书,其中的组合物、化合物或产物被描述为具有、包含或包括特定组分,或其中的过程和方法被描述为具有、包含或包括特定步骤,此外,还预期存在本技术的基本上由所述组分组成或由所述组分组成的物品、装置和系统,并且存在根据本技术的基本上由所述处理步骤组成或由所述处理步骤组成的过程和方法。
78.应理解,步骤的次序或用于进行某些动作的次序并不重要,只要所描述的方法保
持可操作即可。此外,可同时进行两个或更多个步骤或动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1