一种煤岩识别系统和装置的制作方法
[0001]
本实用新型涉及煤矿智能化技术领域,特别涉及一种煤岩识别系统和装置。
背景技术:
[0002]
采煤机是综合机械化采煤工作面的主要设备之一,目前所有种类的采煤机均是按照设定的固定采掘路线进行工作。当采煤机的采掘头截割到岩石时,一方面造成采煤机采掘头的磨损加剧、功率消耗增大,甚至由于采掘头的摩擦力过大所产生的高温引爆瓦斯;另一方面采掘的煤中含矸量增大。目前解决上述问题是通过现场操作人员及时停机调整采掘头的位置来解决,工人的劳动强度和危险性大。
技术实现要素:
[0003]
针对现有技术中采掘头无法得到及时调整的问题,本实用新型提出一种识别系统和装置,通过图像采集模块实时采集煤壁图像,再提取特征向量输入到控制器,识别出煤岩类型;同时通过静力触探阵列模块实时采集采煤机滚筒截割前方煤壁的贯入阻力,将贯入阻力传输到控制模块,进行煤岩识别,与图像识别结果联合判断,实现采煤工作面超前煤岩识别。
[0004]
为了实现上述目的,本实用新型提供以下技术方案:
[0005]
一种煤岩识别系统,包括第一识别子系统,第一识别子系统包括图像采集模块、图像处理模块、图像识别模块;
[0006]
图像采集模块包括多个图像采集传感器,将采集的煤岩图像和相对应的空间坐标传输到图像处理模块以提取煤岩图像的特征向量,图像识别模块根据提取的特征向量进行煤、岩识别,控制器根据识别的岩图像和对应的空间坐标,调整采煤机滚筒的高度以避开煤壁中岩。
[0007]
优选的,所述图像采集模块的输出端与所述图像处理模块的输入端连接,所述图像处理模块的输出端与所述图像识别模块的输入端连接,所述图像识别模块的输出端与控制器的第一输入端连接,控制器控制采煤机滚筒调整高度。
[0008]
优选的,还包括第二识别子系统;所述第二识别子系统包括静力触探阵列模块、信号识别模块;
[0009]
所述静力触探阵列模块的信号输出端与所述信号识别模块的信号输入端连接,所述信号识别模块的输出端与控制器的第二输入端连接,控制器的输出端与采煤机滚筒连接;
[0010]
所述静力触探阵列模块包括多个静力触探传感器,用于对将煤壁网格化,并对煤壁施加作用力从而采集对应网格的贯入阻力电信号和空间坐标;
[0011]
所述信号识别模块,用于根据采集的贯入阻力电信号,进行煤岩识别,同时记录空间坐标;
[0012]
所述控制器,根据识别的岩和对应的空间坐标,调整采煤机滚筒的高度以避开煤
壁中岩。
[0013]
本实用新型还提供一种煤岩识别装置,包括若干个支架;所述支架包括第一侧面和第二侧面,在每个支架中第一侧面和第二侧面的相交处安装连接杆,且在连接杆上安装图像采集传感器。
[0014]
优选的,第一侧面和第二侧面的夹角为α,0
°
≤α<180
°
。
[0015]
优选的,若干个支架之间互相平行,且与采煤机连接。
[0016]
优选的,所述支架还包括第三侧面,第三侧面和第二侧面的夹角为β。
[0017]
优选的,所述β的大小为α≤β<α+90
°
。
[0018]
优选的,所述第三侧面的顶端安装有静力触探传感器。
[0019]
优选的,所述第一侧面上安装有固定云台,所述固定云台上安装有防尘模块。
[0020]
综上所述,由于采用了上述技术方案,与现有技术相比,本实用新型至少具有以下有益效果:
[0021]
本实用新型通过图像处理技术或静力触探传感阵列完成采煤工作面煤岩的超前识别,并根据识别结果调整采煤机的高度,尽可能的采掘煤层,避开坚硬的岩石,防止采煤机的刀面被损坏,延长采煤机等采煤设备的使用年限,对采煤工作面智能开采具有重要指导意义。
附图说明:
[0022]
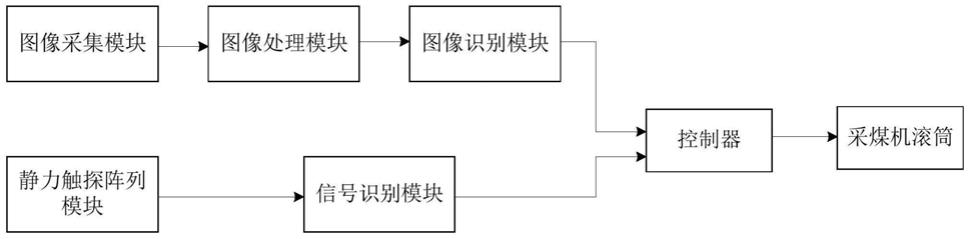
图1为根据本实用新型示例性实施例的一种煤岩识别系统示意图。
[0023]
图2为根据本实用新型示例性实施例1的一种煤岩识别装置示意图。
[0024]
图3为根据本实用新型示例性实施例2的一种煤岩识别装置示意图。
[0025]
图4为根据本实用新型示例性实施例的一种防尘模块安装示意图。
[0026]
图5为根据本实用新型示例性实施例的一种防尘模块结构示意图。
[0027]
图6为根据本实用新型示例性实施例的一种煤岩识别方法示意图。
[0028]
图7为根据本实用新型示例性实施例的一种有效图像采集示意图。
具体实施方式
[0029]
下面结合实施例及具体实施方式对本实用新型作进一步的详细描述。但不应将此理解为本实用新型上述主题的范围仅限于以下的实施例,凡基于本
技术实现要素:
所实现的技术均属于本实用新型的范围。
[0030]
在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0031]
如图1所示,本实用新型提供一种基于图像及静力触探阵列传感的煤岩识别系统,包括两路识别子系统,第一识别子系统包括图像采集模块、图像处理模块、图像识别模块和控制器;第二识别子系统包括静力触探阵列模块、信号识别模块和控制器。
[0032]
第一识别子系统:
[0033]
图像采集模块的输出端与图像处理模块的输入端连接,图像处理模块的输出端与图像识别模块的输入端连接,图像识别模块的输出端与控制器的第一输入端连接,控制器的输出端与采煤机滚筒连接以控制调节采煤机滚筒高度的调节;
[0034]
图像采集模块,包括若干个图像采集传感器,用于将煤壁网格化并建立空间坐标系,再采集网格中的煤岩图像同时记录对应的空间坐标,为保证清晰度便于图像处理,煤岩图像的分辨率一般在800万像素以上;
[0035]
图像处理模块,用于通过现有的图像处理算法提取煤岩图像特征向量,与样本库中的煤、岩图像特征向量做聚类分析。
[0036]
本实施例中,图像处理模块包括两个部分,离线处理模块和在线处理模块。
[0037]
离线处理模块,用于处理样本库中的原始煤、岩图像(样本库中煤、岩是分开的),并对原始煤、岩图像进行预处理,例如统一图像大小和去除噪声;然后对预处理后的煤图像进行特征提取并量化从而得到煤特征向量集合c={c1,c2,
…
,c
k
},c
k
表示第k张样本库中煤图像的特征向量,以及对预处理后的岩图像进行特征提取并量化从而得到岩特征向量集合β={β1,β2,
…
,β
m
},β
m
表示第m张样本库中岩图像的特征向量,提取的特征包括纹理特征、角点特征、高斯特征等。此处对样本库煤岩图像的特征向量进行一次归类,理论上此时不同煤图像和不同岩图像的特征向量的汉明距离或欧几里得距离很近,不同岩图像的特征向量距离也很近。
[0038]
本实施例中,分别计算煤特征向量集合和岩特征向量集合之间特征向量的汉明距离或欧几里得距离t(汉明距离或欧几里得距离的计算是现有数学公式,在此不加以赘述),例如将煤特征向量集合c中c1和岩特征向量集合β中每个岩图像的特征向量({β1,β2,
…
,β
m
})分别求距离,然后c2和{β1,β2,
…
,β
m
}分别求距离,直到c
k
和β1~β
m
分别求距离,从而得到距离集合t={t
11
,t
12
,
…
,t
km
},t
km
表示第k张样本库中煤图像的特征向量和第m张样本库中岩图像的特征向量之间的距离。
[0039]
在线处理模块,用于实时处理采煤机工作时采集的煤壁图像,通过图像预处理,变的和离线处理模块大小一致,再通过和离线处理模块一样的方法特征提取、量化得到煤壁特征向量集合γ
nt
表示第n个图像采集触感器第t次采集的煤壁图像的特征向量,然后将煤壁特征向量集合γ和样本库中煤特征向量集合c和岩特征向量集合β做聚类分析,具体聚类分析方法:计算集合γ和集合c中所有煤图像的距离(汉明距离或欧几里得距离)并取最小值a;再计算集合γ和集合β中所有岩图像的距离并取其中的最小值b;比较a、b大小,哪个小,就将该图像归为对应的类。若a、b都大于t,该图像既不归类为岩,也不归类为煤,判定为无效图像;根据实际情况,t值会进行调节。
[0040]
图像识别模块,用于根据聚类分析对煤岩图像中的物体进行煤、岩分类。
[0041]
本实施例中,当图像识别模块判定该煤岩图像为煤图像时,则略过;若判定该煤岩图像为岩图像,则将该煤岩图像对应的空间坐标保存;若判定该图像非煤图像,也非岩图像,前方煤壁可能被粉尘遮挡,此次识别作废,略过;若判定该煤岩图像既是煤图像,又是岩图像,将该煤岩图像对应的空间坐标保存;为保证采煤机的滚筒在挖掘过程中能避开岩,则
控制器根据保存的空间坐标,调整滚筒的高度(例如调高或调低)以使得滚筒避开岩。
[0042]
为保证系统识别的精准度,本实施例中,还提供了第二识别子系统:
[0043]
静力触探阵列模块的电信号输出端与信号识别模块的电信号输入端连接,信号识别模块的输出端与控制器的第二输入端连接,控制器根据识别结果控制采煤机滚筒调节高度;
[0044]
静力触探阵列模块,包括若干个静力触探传感器,用于将煤壁网格化并建立空间坐标系,通过每个静力触探传感器对煤壁施加作用力,采集其贯入阻力电信号和相对应的空间坐标;
[0045]
信号识别模块,用于根据采集的贯入阻力电信号,结合贯入阻力与煤岩的工程地质特征之间的定性关系(由于煤壁中煤、岩的软硬不同,静力触探传感器探头所受阻力响应变化,强度愈高,探头所受的压力也愈大)和统计煤、岩相关关系(即煤壁中煤、岩分别对应的贯入阻力范围)进行煤岩识别。
[0046]
本实施例中,信号识别模块也可以分为信号离线处理模块和信号在线处理模块。信号离线处理模块就是采集煤、岩贯入阻力样本,并分析得到煤、岩分别对应的贯入阻力范围(煤、岩相关关系);信号在线处理模块就是对静力触探传感器探头实时采集的贯入阻力电信号做分析,根据信号离线处理模块得到的煤、岩贯入阻力范围判断探头接触部位是煤还是岩。
[0047]
本实施例中,若信号识别模块判定对应位置为煤层,略过;若判定对应位置为岩层,将对应空间坐标保存;为保证采煤机的滚筒在挖掘过程中能避开岩,则控制器根据保存的岩层空间坐标,调整滚筒的高度(例如调高或调低)以使得避开岩,从而降低滚筒中采掘头的磨损。
[0048]
本实施例中,还包括防尘模块,在图像采集模块或静力触探阵列模块和采煤机滚筒之间形成一道防尘幕布,降低滚筒截割时产生的粉尘对图像采集模块采集图像的影响。
[0049]
本实施例中,一种煤岩识别装置,包括n个支架10,每个支架10上均安装有一个静力触探阵列模块20和图像采集模块30,n个支架10均与采煤机连接。
[0050]
本实施例中,采煤机滚筒分别安装在采煤机的左右两侧,以进行前后切割煤层;采煤机左右两侧是镜像安装的,因此本实施例中,为便于说明,以采煤机的左侧系统的安装结构进行说明。
[0051]
实施例1
[0052]
如图2所示,支架10,用于与采煤机刚性连接;支架10包括两个个侧面,与采煤机连接的一个侧面为第一侧面101,与煤壁接触的一个侧面为第二侧面102,第二侧面102与第一侧面101之间的夹角为α,0
°
≤α<180
°
,一般设置为60
°
≤α<150
°
。
[0053]
本实施例中,n个支架10通过连接杆50固定在一起,即在每个支架10中第一侧面101和第二侧面102的相交处安装连接杆50以将n个支架10固定,且图像采集传感器20安装在第一侧面101和第二侧面102的相交处的连接杆50上,采集对应的煤岩图像传输到控制器进行煤岩识别。
[0054]
本实施例中,静力触探传感器30需要和煤壁进行接触,是通过对煤壁施加作用力从而产生贯入阻力来识别煤岩的,因此静力触探传感器30安装在第二侧面102的顶端(即第二侧面102与煤壁接触的一端,第二侧面102的另一端与第一侧面101连接);在运动过程中,
静力触探传感器30深入煤壁一定距离(例如2cm),产生贯入阻力,进而采集到贯入阻力电信号传输到控制器进行煤岩识别。静力触探传感器30的数量和图像采集传感器20的数量可以相同也可以不同,因为这两种传感器的工作机制不一样。
[0055]
图像处理模块、图像识别模块、信号识别模块安装在支架上,控制器安装在采煤机上;或图像处理模块、图像识别模块、信号识别模块和控制器均可集中安装在采煤机上,这样可减轻支架10的重量。各个模块之间的传输可采用电缆或无线传输。
[0056]
实施例2
[0057]
如图3所示,支架10,用于与采煤机刚性连接;支架10包括三个侧面,与采煤机连接的一个侧面为第一侧面101,靠近煤壁(并未接触煤壁)的一个侧面为第二侧面102,第二侧面102与第一侧面101之间的夹角为α,0
°
≤α<180
°
;与煤壁接触的一个侧面为第三侧面103,第三侧面103与第二侧面102之间的夹角为β,α<β<α+90
°
,且第三侧面103向远离采煤机的方向偏转,这样可便于将静力触探传感器安装在第三侧面103上,可提前对煤壁中煤、岩进行识别。设置第三侧面103的好处是便于静力触探传感器30的安装,以及静力触探传感器30在采煤机运动时能提前探测和识别煤壁中的煤和岩,便于采煤机能及时做出判断以调整采煤机滚筒的高度。
[0058]
本实施例中,n个支架10通过连接杆50固定在一起,即在每个支架10中第一侧面101和第二侧面102的相交处安装连接杆50以将n个支架10固定,且图像采集传感器20安装在第一侧面101和第二侧面102的相交处的连接杆50上,采集对应的煤岩图像传输到控制器进行煤岩识别。
[0059]
本实施例中,静力触探传感器30需要和煤壁进行接触,是通过对煤壁施加作用力从而产生贯入阻力来识别煤岩的,因此静力触探传感器30安装在第二侧面102的顶端(即第二侧面102与煤壁接触的一端,第二侧面102的另一端与第一侧面101连接);在运动过程中,静力触探传感器30深入煤壁一定距离(例如2cm),产生贯入阻力,进而采集到贯入阻力电信号传输到控制器进行煤岩识别。静力触探传感器30的数量和图像采集传感器20的数量可以相同也可以不同,因为这两种传感器的工作机制不一样。
[0060]
图像处理模块、图像识别模块、信号识别模块安装在支架上,控制器安装在采煤机上;或图像处理模块、图像识别模块、信号识别模块和控制器均可集中安装在采煤机上,这样可减轻支架10的重量。各个模块之间的传输可采用电缆或无线传输。
[0061]
如图4所示,为降低采煤机滚筒截割煤壁时产生的粉尘对图像采集传感器20采集图像或对静力触探传感器30对煤壁施加作用力的影响,可在采煤机滚筒和图像采集传感器20采集图像或对静力触探传感器30之间安装防尘模块40。为便于防尘模块40的安装,可在第一侧面101上安装固定云台104,再在固定云台104上安装防尘模块40。
[0062]
如图5所示,防尘模块40包括进入通道401、壳体402、管道403以及喷口404。本实施例中,壳体402为倒圆锥形,壳体402包括侧面4021和底面4022,且底面4022为弧形;喷口404为多个,平均分布在底面4022上,每个喷口404间隔一定距离;管道403为多个且与喷口404一一对应,均设置在壳体402内部,作用是将喷口404与进入通道401连接起来。本实施例中,每一个喷口404可喷出一个扇形的水幕或风幕,多个喷口404组成一道防尘水幕或风幕,当采煤机滚筒切割煤壁产生粉尘时,防尘模块40喷出的水幕或风幕可有效防止粉尘飘散到图像采集传感器20或对静力触探传感器30,从而提高了图像采集的精度。
[0063]
本实施例中,基于上述的一种煤岩识别系统和装置,还提供了一种煤岩识别方法,如图6所示,具体包括以下步骤:
[0064]
s1:将n个图像采集传感器安装在煤岩识别装置上并从上到下进行编号,以将煤壁网格化。
[0065]
本实施例中,煤壁的高度为h,当n个图像采集传感器将煤壁网格化时,每个网格的长为h/n、宽为h/n。假设采煤机最大速度为v,则采集频率f=vn/h,当图像传感器视角大于等于90
°
时,采集的煤岩图像能完全覆盖煤壁,保证不会因煤壁覆盖不完全产生识别误差,提高了准确率。
[0066]
s2:设置图像采集传感器的固定角度,以对煤壁进行拍摄得到有效图像。
[0067]
本实施例中,控制器处理数据是需要一定的反应时间,即图像采集和控制调节采煤机滚筒高度之间是存在时间差的,因此为消除这个时间差以保证采煤机滚筒的高度能得到及时调整,就需要对图像进行超前采集。在本实施例中,图像采集传感器安装在支架上并与第二侧面102形成一个角度θ,且θ>0
°
,从而对煤壁进行斜向拍摄,从而得到有效图像。
[0068]
s2-1:设置图像采集传感器的固定角度θ。
[0069]
本实施例中,如图7所示,若想图像采集传感器模块在90
°
视角内采集的图像完全覆盖煤壁,为便于采煤机在运动过程中能一边采集煤岩图像一边识别出煤、岩,因此需要对煤岩图像进行提前采集,因此需要设置图像采集传感器的固定角度θ,以便与煤壁形成一定的向前倾斜角度θ。当设置图像采集传感器的固定角度θ后,以图像采集传感器为顶点做等腰直角三角形aof,即图像采集传感器所在a点与煤壁的垂直交点为o点,f点为图像区域de的中点,即图像采集传感器顶点与煤壁的虚拟交点。当图像采集传感器与煤壁形成一定的向前倾斜角度θ后,拍摄的煤壁煤岩图像区域为de,即为有效图像;有效图像对应煤壁的一个正方形区域,则od为有效图像与图像采集传感器的超前距离。
[0070]
本实施例中,斜边af要大于等于该图像采集传感器对应的网格的宽度h/n(即af≥h/n),在等腰直角三角形aof中,cosθ=oa/af≤g/(h/n)≤1,所以解的:当g≤h/n时,θ=arcos(ng/h),即为θ最小值;当g≥h/n时,θ≥0
°
;所以θ的范围是0
°
≤θ<90
°
或arcos(ng/h)≤θ<90
°
,h表示煤壁高度,n表示图像采集传感器数量,g表示图像采集传感器到煤壁的垂直距离。
[0071]
s2-2:计算出有效图像与图像采集传感器的超前距离od。
[0072]
本实施例中,如图7所示,有效图像为图像采集传感器拍摄的网格煤岩图像,对应煤壁的一个正方形区域,长度de为网格的长h/n,宽度大小也为h/n。超前距离也是一个区间,即od~oe,其中od=of-df=g*tanθ-h/2n,oe=of+ef=g*tanθ+h/2n,如果od<0,下限取0。
[0073]
本实施例中,控制器处理数据是需要一定的反应时间,即图像采集和控制调节采煤机滚筒高度之间是存在时间差的,因此超前距离是为了保证消除这个时间差以使得采煤机滚筒的高度能得到及时调整,提高实时性。
[0074]
s3:对有效图像进行特征向量提取,根据特征向量进行煤、岩识别。
[0075]
本实施例中,在同一时刻,n个图像采集传感器对煤壁进行拍摄,可得到n张有效图像,因此在对n张有效图像进行特征向量提取前,可进行预处理,包括根据采集设备编号和空间位置对有效图像命名、统一有效图像大小,这样便于得到相对应的特征向量,从而根据
特征向量进行煤、岩识别。
[0076]
s3-1:分别对样本库中的煤、岩图像进行特征向量提取得到煤特征向量集合c和岩特征向量集合β,并计算煤、岩特征向量集合之间的距离,从而得到距离集合t。
[0077]
本实施例中,对样本库中煤图像进行特征提取(包括纹理特征、角点特征、高斯特征等)并量化从而得到煤特征向量集合c={c1,c2,
…
,c
k
},c
k
表示第k张样本库中煤图像的特征向量,以及对预处理后的岩图像进行特征提取并量化从而得到岩特征向量集合β={β1,β2,
…
,β
m
},β
m
表示第m张样本库中岩图像的特征向量。此处对样本库煤岩图像的特征向量进行一次归类,理论上此时不同煤图像和不同岩图像的特征向量的汉明距离或欧几里得距离很近,不同岩图像的特征向量距离也很近。
[0078]
本实施例中,分别计算煤特征向量集合和岩特征向量集合之间特征向量的汉明距离或欧几里得距离t(汉明距离或欧几里得距离的计算是现有数学公式,在此不加以赘述),例如将煤特征向量集合c中c1和岩特征向量集合β中每个岩图像的特征向量({β1,β2,
…
,β
m
})分别求距离,然后c2和{β1,β2,
…
,β
m
}分别求距离,直到c
k
和β1~β
m
分别求距离,从而得到距离集合t={t
11
,t
12
,
…
,t
km
},t
km
表示第k张样本库中煤图像的特征向量和第m张样本库中岩图像的特征向量之间的距离。得到距离集合t后,可对集合进行大小排序,并选取距离最大值t
max
作为判断阈值。
[0079]
s3-2:实时采集煤壁图像,提取煤壁图像的特征向量得到煤壁特征向量集合γ,通过聚类分析方法识别出煤壁的煤、岩。
[0080]
本实施例中,实时采集煤壁图像,通过图像预处理,进行特征提取、量化得到煤壁特征向量集合γ
nt
表示第n个图像采集传感器第t时刻采集的煤壁图像的特征向量,然后将煤壁特征向量集合γ和样本库中煤特征向量集合c和岩特征向量集合β做聚类分析。
[0081]
具体聚类分析方法:
[0082]
本实施例中,n个图像采集传感器在同一时刻t是同时进行煤壁图像采集的,因此为了图像分析的实时性,聚类对象是同一t时刻n个图像采集传感器采集的煤壁图像对应的煤壁特征向量{r
1t
,r
2t
,...,r
nt
}。
[0083]
计算{r
1t
,r
2t
,...,r
nt
}中任一煤壁特征向量γ
nt
和集合c中所有煤特征向量的距离(汉明距离或欧几里得距离)并取最小值a;再计算{r
1t
,r
2t
,...,r
nt
}中任一煤壁特征向量γ
nt
和集合β中所有岩特征向量的距离并取其中的最小值b;比较a、b大小,哪个小,就将该图像归为对应的类。比较a、b大小,若a<b,则γ
nt
对应的煤壁图像为煤;若b<a,则γ
nt
对应的煤壁图像为岩。若t
max
<a<b,或t
max
<b<a,则γ
nt
对应图像既不归类为岩,也不归类为煤,即判定γ
nt
对应图像为无效图像;根据实际情况,t
max
值会进行调节。
[0084]
s4:若判定煤壁图像为煤图像,保持静默;若判定煤壁图像为岩图像,将该煤壁图像对应的空间位置数据发送到控制器,控制器根据空间位置调节采煤机滚筒的高度以避开该空间位置;若判定煤壁图像既不是煤图像,也不是岩图像,可能前方煤壁被粉尘遮挡,此煤壁图像作废,保持静默,则不对滚筒高度进行调整,继续保持原有方向就行切割煤壁;若
判定煤壁图像既是煤图像,又是岩图像,将煤壁图像对应位置的数据发送到控制器,控制器根据空间位置调节采煤机滚筒的高度以避开该空间位置。
[0085]
为提高采煤机识别煤壁中煤、岩的准确性,还包括以下步骤:
[0086]
s5:将m个静力触探传感器安装在煤岩识别装置上并从上到下进行编号,将煤壁网格化,则每个网格长、宽均为h/m。
[0087]
本实施例中,m个静力触探传感器将煤壁网格化时,静力触探传感器分别与每个网格进行一一对应,这样可方便知道网格的位置。
[0088]
s6:静力触探传感器给煤壁施加作用力并采集贯入阻力电信号,再将采集的贯入阻力电信号传输到信号识别模块和贯入阻力范围进行对比,从而进行煤、岩识别。
[0089]
本实施例中,信号识别模块可以分为信号离线处理模块和信号在线处理模块。信号离线处理模块就是采集煤、岩贯入阻力样本,并分析得到煤、岩分别对应的贯入阻力范围(煤、岩相关关系);信号在线处理模块就是对静力触探传感器探头实时采集的贯入阻力电信号做分析,即与信号离线处理模块得到的煤、岩贯入阻力范围进行比对,从而判断探头接触部位是煤还是岩。
[0090]
本实施例中,随采煤机前进带动静力触探传感器给煤壁施加作用力,采集静力触探传感器对应煤壁位置的贯入阻力电信号,对采集到的电信号进行预处理,根据静力触探传感器的编号、电信号强度和采集电信号对应的位置分别建立静力触探曲线图,再通过贯入阻力与煤岩的工程地质特征之间的定性关系(由于煤壁中煤、岩的软硬不同,静力触探传感器探头所受阻力响应变化,强度越高,探头所受的压力也越大,对应的贯入阻力电信号强度越大)和统计煤、岩相关关系(即煤壁中煤、岩分别对应的贯入阻力范围)进行煤岩识别。
[0091]
同理,本实施例中,超前距离就是滚筒到静力触探传感器的水平距离,得出滚筒之前超前距离的地方是煤还是岩,是煤就采掘,是岩就避开。
[0092]
s7:若判定该传感器采集的贯入阻力电信号对应为煤层,保持静默;若判定该传感器采集的贯入阻力电信号对应为岩层,将采集该信号对应位置的数据发送到控制器,控制器根据空间位置调节采煤机滚筒的高度以避开该空间位置。
[0093]
本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1