一种构造煤煤层气井下混合物举升的控制方法与系统
1.本发明涉及煤层气开采过程井下混合物举升控制领域,尤其涉及一种构造煤煤层气井下混合物举升的控制方法及系统。
背景技术:
2.我国煤层气资源丰富,具有广阔的开发前景。构造煤作为我国已发现煤炭资源中占比较高的一部分,具有富气、低渗、松软等特点,且多为煤与瓦斯突出煤层,开采利用较为困难。现阶段煤层气的开发主要围绕资源勘探与煤层气地面井开发两方面。随着煤层气的开发,煤粉问题已逐渐成为制约煤层气开发的重要问题。主要表现在煤粉迁移对于储层伤害和煤粉堵塞造成的排采故障。
3.通过煤粉生成与迁移的实验,表明生产过程中的煤粉对煤层渗透性具有显著影响。气液固三相实验表明煤粉粒径,液体流量和瓦斯流量对煤粉举升高度有明显的影响,而煤颗粒质量浓度的影响可忽略不计。对于举升装置的控制,现阶段多为借鉴石油天然气开采中较为成熟的控制方式,采用机器学习对人工举升系统进行了优化。通过设计新的管道,降低煤水悬浮液中的煤粉的沉降。
4.构造煤由于煤的构造变形程度高,井下煤粉浓度相比其他原生煤更高,平均粒径更小。在实际开采过程中,水平井诱导造洞穴垮落煤粉、储层应力释放后产出煤层气为主的流体和泵入井中的水构成气
‑
水
‑
高浓度煤粉多相混合物,混合物需要通过直井进行举升。倘若举升流量不够或举升不及时,容易造成煤粉卡泵、泵漏、泵阀难开启等问题。而流量过大或压力过大时,容易造成产气通道的破坏,导致后续产气量下降,降低煤层气开采的经济效益。因此控制气水煤混合物举升过程中流量稳定对实现混合物的高效举升具有重要意义。
技术实现要素:
5.本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种构造煤煤层气井下混合物举升的控制方法及系统。
6.本发明解决其技术问题所采用的技术方案是:
7.本发明提供一种构造煤煤层气井下混合物举升的控制方法,该方法包括以下步骤:
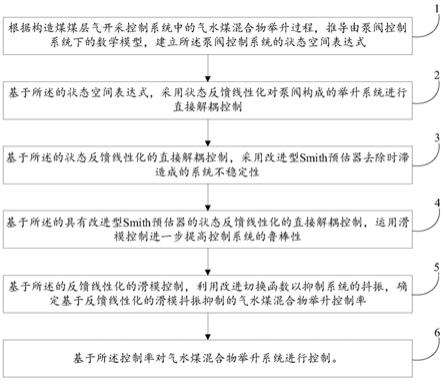
8.步骤1:根据构造煤煤层气开采控制系统中的气水煤混合物举升过程,推导由泵阀控制系统控制下的数学模型,建立所述泵阀控制系统的状态空间表达式;
9.步骤2:基于所述的状态空间表达式,采用状态反馈线性化对泵阀构成的举升系统进行直接解耦控制;
10.步骤3:基于所述的状态反馈线性化的直接解耦控制,采用改进型smith预估器去除时滞造成的系统不稳定性;
11.步骤4:基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,
运用滑模控制进一步提高泵阀控制系统的鲁棒性;
12.步骤5:基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制泵阀控制系统的抖振,确定构造煤煤层气井下混合物举升的控制率;
13.步骤6:基于所述控制率对气水煤混合物举升系统进行控制。
14.进一步地,本发明的所述步骤1中,根据构造煤煤层气开采控制系统中的气水煤混合物举升过程,推导由泵阀控制系统控制下的数学模型,建立所述泵阀控制系统的状态空间表达式,其具体方法为:
15.构造煤煤层气开采控制系统包括六大部分:煤系地层结构重构与相似材料子系统,水平井双向往复式钻井与洞穴完井子系统,水平井洞穴激励卸压与流体运移子系统,直井气水煤粉混合物举升与产出子系统,地面气水煤分离、收集与水循环使用子系统,仪器系统信息与自动化控制子系统;
16.构造煤煤层气开采控制系统用于构造煤煤层气开发,探索构造煤原位煤层气高效勘探开发理论和技术装备;该方法针对其中的直井气水煤粉混合物举升与产出子系统进行研究与控制;直井气水煤粉混合物举升与产出子系统通过泵阀控制系统控制举升设备和煤粉破碎与扰动装置,实现底层煤粉的及时破碎与水力输送,达到煤粉不堵塞管道与产出液平稳收集的目的;泵阀控制系统由动力液罐,离心泵,气动控制阀,设备管道,举升装备,产出液罐构成;
17.对泵阀控制系统从动力液罐到产出液罐由伯努利方程化简得到:
[0018][0019]
式中,q为管道中的流量,a为管道的横截面积,ρ为流体密度,l为管线总长度;δp
e
为泵提供的压力,δp
v
为阀门造成的压力损失,δp
c
为混合物举升设备造成的压力损失;
[0020]
以流量q,控制阀开度γ和离心泵转速n为状态变量,以阀开度设定γ
set
和离心泵转速设定n
set
为输入变量,以流量q和控制阀压差δp
v
为输出变量,推导出泵阀控制系统的状态空间方程为:
[0021][0022]
式中:
[0023][0024][0025]
[0026][0027]
其中,t
γ
和t
n
分别为控制阀和离心泵的时间常数。
[0028]
进一步地,本发明的所述步骤2中,基于所述的状态空间表达式,采用状态反馈线性化对泵阀构成的举升系统进行直接解耦控制,其具体方法为:
[0029]
对状态方程中输出y求导,直到控制u明确出现;
[0030][0031]
式中:
[0032][0033]
其中,b为阀门压力损失拟合系数,k(γ)为阀门流量拟合曲线;
[0034]
当控制率选择为
[0035][0036]
时,将控制率代入线性化模型,则原模型描述为:
[0037][0038][0039]
即可实现精确线性化的直接解耦。
[0040]
进一步地,本发明的所述步骤3中,基于所述的状态反馈线性化的直接解耦控制,采用改进型smith预估器去除时滞造成的系统不稳定性,其具体方法为:
[0041]
对该时滞系统进行时滞平衡后,在原smith预估器的设计基础上,在主反馈回路增加了一个一阶滤波环节g
f
(s),用以降低模型误差与干扰带来的影响。
[0042]
进一步地,本发明的所述步骤4中,基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,运用滑模控制进一步提高泵阀控制系统的鲁棒性,其具体方法为:
[0043]
定义滑模面:
[0044][0045]
式中,e1=y
1set
‑
y1,e2=y
2set
‑
y2,α为常系数;
[0046]
则
[0047][0048]
式中
[0049][0050]
系数α使得多项式满足赫尔维茨稳定性判据;
[0051]
控制律选择为:
[0052]
u=g
‑1[d+k
·
sgn(s)
‑
f]
[0053]
式中sgn(s
i
)是符号函数;
[0054][0055]
式中且k1>0,k2>0;综上得到:
[0056][0057][0058]
则因此s
i
在有限时间内趋于0;当轨迹到达滑模面时,误差趋近于0,故系统始终在滑模面附近运动,实现对目标信号的跟踪,并且具有一定的抗扰动能力。
[0059]
进一步地,本发明的所述步骤5中,基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振,确定构造煤煤层气井下混合物举升的控制率,其具体方法为:
[0060]
考虑到滑模控制中存在的抖振问题是由于控制率中的符号函数sgn(s)引起的,选用连续光滑的双曲正切函数作为替代,降低滑模控制中的抖振问题:
[0061][0062]
改进的滑模控制不会影响原来滑模控制的性能,仍具有较强的鲁棒性。
[0063]
本发明提供一种构造煤煤层气井下混合物举升的控制系统,该系统包括:
[0064]
状态空间表达式建立模块,用于根据泵阀控制系统下的数学模型,建立所述泵阀控制系统的状态空间表达式;泵阀控制系统包括依次连接的动力液罐、离心泵、气动控制阀、举升装备、产出液罐,泵阀控制系统各部件中间由管道、法兰相连;
[0065]
状态反馈线性化解耦模块,用于基于所述的状态空间表达式,获取状态反馈线性化解耦控制率;
[0066]
改进型smith预估器模块,用于基于所述的状态反馈线性化的直接解耦控制,去除时滞造成的系统不稳定性;
[0067]
滑模控制模块,用于基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,获取滑模控制率;
[0068]
滑模抖振抑制模块,用于基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振。
[0069]
进一步地,本发明的所述的状态反馈线性化解耦模块,具体包括:
[0070]
基于所述的状态空间表达式,获取状态反馈线性化解耦控制率为:
[0071][0072]
将控制率代入线性化模型,则原模型描述为:
[0073][0074][0075]
即可实现精确线性化的直接解耦;
[0076]
所述的改进型smith预估器模块,具体包括:基于所述的状态反馈线性化的直接解耦控制,去除时滞造成的系统不稳定性;对该时滞系统进行时滞平衡后,在原smith预估器的设计基础上,在主反馈回路增加了一个一阶滤波环节g
f
(s),用以降低模型误差与干扰带来的影响。
[0077]
进一步地,本发明的所述的滑模控制模块,具体包括:
[0078]
基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,获取滑模控制率;
[0079]
定义滑模面:
[0080][0081]
式中,e1=y
1set
‑
y1,e2=y
2set
‑
y2,α为常系数;
[0082]
则
[0083][0084]
式中
[0085][0086]
系数α使得多项式满足赫尔维茨稳定性判据;
[0087]
控制律选择为:
[0088]
u=g
‑1[d+k
·
sgn(s)
‑
f]
[0089]
式中sgn(s
i
)是符号函数;
[0090][0091]
式中且k1>0,k2>0。
[0092]
进一步地,本发明的所述的滑模抖振抑制模块,具体包括:
[0093]
基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振;考虑到滑模控制中存在的抖振问题是由于控制率中的符号函数sgn(s)引起的,选用连续光滑的双曲正切函数作为替代,降低滑模控制中的抖振问题:
[0094][0095]
改进的滑模控制不会影响原来滑模控制的性能,仍具有较强的鲁棒性。
[0096]
本发明产生的有益效果是:本发明的构造煤煤层气井下混合物举升的控制方法及系统,(1)基于状态反馈精确线性化设计的滑模控制能具备状态反馈精确线性化的优点,具有良好的解耦效果。(2)针对模型参数的不确定性,滑模控制具有较强的鲁棒性。能明显缩短流量的调节时间,同时避免了离心泵的频繁启停。(3)使用双曲正切函数代替符号函数,使得滑模的抖振问题得到明显的改善,提高了泵体的使用寿命,使离心泵转速调节更加稳定。
附图说明
[0097]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0098]
图1为本发明一种构造煤煤层气井下混合物举升的控制方法的流程示意图;
[0099]
图2为本发明改进型smith预估器方框图;
[0100]
图3为本发明直接控制与改进型smith预估器控制的响应曲线对比图;
[0101]
图4为本发明直接解耦与滑模控制的响应曲线对比图;
[0102]
图5为本发明滑模控制与滑模抖振抑制的响应曲线对比图。
具体实施方式
[0103]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0104]
如图1所示,本发明实施例的构造煤煤层气井下混合物举升的控制方法,包括以下步骤:
[0105]
步骤1:根据构造煤煤层气开采控制系统中的气水煤混合物举升过程,推导由泵阀控制系统下的数学模型,建立所述泵阀控制系统的状态空间表达式。具体过程如下:
[0106]
对于整个系统,设动力液罐为a,产出液罐为b,忽略管道内壁摩擦损失由伯努利方程得:
[0107][0108]
式中ρ为流体密度,g为重力加速度,h为水平高度,p为流体压力,v为流速,l为沿管线的长度。
[0109]
由于此装备中泵阀系统压力不大,可近似认为水不可压且密度恒定。设泵提供的压力为δp
e
,阀门造成的压力损失为δp
v
,混合物举升设备造成的压力损失为δp
c
。且动力液水箱与产出液水箱高度相差不大,压力、流速基本一致。因此得:
[0110][0111]
式中l为管线总长度,a为管道的横截面积,q为管道中的流量。设泵为离心泵,可采用二次多项式进行拟合,则离心泵扬程h、转速n、流量q的拟合关系式为h=a1q2+a2nq+a3n2,式中a1、a2、a3为离心泵的扬程曲线拟合系数,则离心泵所提供的压力为:
[0112]
δp
e
=ρgh=ρg(a1q2+a2nq+a3n2)
[0113]
设调节阀为气动球阀,流体通过阀门v的压力损失δp
v
与安装方式、流体类型、流量q和阀门流量系数k(γ)有关。实验测得阀门压力损失拟合曲线关系式为:
[0114][0115]
式中b为阀门压力损失拟合系数。k(γ)=b1γ2+b2γ+b3,b1、b2、b3为阀门流量系数曲线拟合系数。
[0116]
气水煤混合物举升装置带来的压力损失δp
c
与流量q成二次关系,拟合关系式为:
[0117]
δp
c
=ρgk
c
q2[0118]
式中k
c
为举升装置压力损失曲线拟合系数。
[0119]
气动控制阀与变频离心泵的特性可以用一阶线性系统描述:
[0120][0121][0122]
式中t
γ
和t
n
分别为控制阀和离心泵的时间常数,γ
set
和n
set
分别为控制阀阀门开度和离心泵转速设定值。以流量q,控制阀开度γ和离心泵转速n为状态变量,以阀开度设定γ
set
和离心泵转速设定n
set
为输入变量,以流量q和控制阀压差δp
v
为输出变量,推导出该系统的状态空间方程为:
[0123][0124]
式中
[0125][0126][0127]
[0128][0129]
步骤2:基于所述的状态空间表达式,采用状态反馈线性化对泵阀构成的举升系统进行直接解耦控制。具体过程如下:
[0130]
对于典型的多输入多输出仿射非线性系统,此系统的精确线性化问题要实现的目标是使系统变换为一个完全可控的线性系统。下面计算相对阶,为求相对阶,对状态方程中输出y求导,直到控制u明确出现。
[0131]
设
[0132]
对于输出y1,
[0133][0134]
对于输出y2,
[0135][0136]
故系统相对阶为r=r1+r2=2+1=3,且满足精确线性化的充要条件。
[0137]
整理得:
[0138][0139]
式中
[0140][0141]
由此可知,输出y的微分与输入u线性相关,通过控制输出y的微分即可实现控制输出y的目的。
[0142]
采用状态反馈控制,当控制率选择为:
[0143][0144]
时,将控制率代入线性化模型,则原模型可以描述为:
[0145]
[0146][0147]
设目标信号与跟踪信号的误差e
i
为:
[0148][0149]
式中y
1set
,y
2set
为目标信号,选择新的输入v
i
为:
[0150][0151]
根据routh稳定性判据,当k
12
,k
11
,k
21
均大于0时,方程所有特征根位于左半平面,且:
[0152][0153]
因此实现了被控变量对目标信号的跟踪。
[0154]
步骤3:基于所述的状态反馈线性化的直接解耦控制,采用改进型smith预估器去除时滞造成的系统不稳定性。具体过程如下:
[0155]
smith预估器的关键思想是针对含有滞后的系统设计出预估补偿器,进而补偿被控对象在原smith预估器的基础上,在主反馈回路增加了一个一阶滤波环节g
f
(s),显著降低了模型误差与干扰带来的影响。一阶滤波环节可选为:
[0156][0157]
式中t
f
=τ/2。
[0158]
步骤4:基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,运用滑模控制进一步提高控制系统的鲁棒性。具体过程如下:
[0159]
考虑到建模过程中存在大量的近似化简,而且实际举升系统由于存在气水煤的多相混合,液体流型会随时发生改变,因此系统参数存在不确定性,需要提高控制系统的鲁棒性。在原状态反馈精确线性化的基础上,为了提高系统的鲁棒性,最常用的办法是采用滑模控制。定义滑模面:
[0160][0161]
式中,e1=y
1set
‑
y1,e2=y
2set
‑
y2,α为常系数。
[0162]
则
[0163][0164]
式中
[0165]
[0166]
系数α应使得多项式满足赫尔维茨稳定性判据。
[0167]
控制律选择为:
[0168]
u=g
‑1[d+k
·
sgn(s)
‑
f]
[0169]
式中sgn(s
i
)是符号函数,如下式所示。
[0170][0171]
式中且k1>0,k2>0。综上可得:
[0172][0173][0174]
则因此s
i
在有限时间内趋于0。当轨迹到达滑模面时,误差趋近于0,故系统始终在滑模面附近运动,实现对目标信号的跟踪,并且具有一定的抗扰动能力。
[0175]
选择李雅普诺夫函数为即可证明滑模控制稳定:
[0176][0177]
步骤5:基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振,确定构造煤煤层气井下混合物举升的控制率。具体过程如下:
[0178]
在实际过程中由于滑模的抖振会带来较大隐患,严重影响执行器寿命,应对其优化以减小振幅。考虑到滑模控制中存在的抖振问题是由于控制率中的符号函数sgn(s)引起的。可选用连续光滑的双曲正切函数作为替代,降低滑模控制中的抖振问题。
[0179][0180]
改进的滑模控制不会影响原来滑模控制的性能,仍具有较强的鲁棒性。
[0181]
步骤6:基于所述控制率对气水煤混合物举升系统进行控制。
[0182]
图2为本发明改进型smith预估器方框图。针对含有滞后的系统设计出预估补偿器,进而补偿被控对象在原smith预估器的基础上,在主反馈回路增加了一个一阶滤波环节g
f
(s),显著降低了模型误差与干扰带来的影响。一阶滤波环节可选为:
[0183][0184]
式中t
f
=τ/2。
[0185]
本发明实施例的构造煤煤层气井下混合物举升的控制系统,该系统包括:
[0186]
状态空间表达式建立模块,用于根据泵阀控制系统下的数学模型,建立所述泵阀控制系统的状态空间表达式;
[0187]
状态反馈线性化解耦模块,用于基于所述的状态空间表达式,获取状态反馈线性化解耦控制率;
[0188]
改进型smith预估器模块,用于基于所述的状态反馈线性化的直接解耦控制,去除时滞造成的系统不稳定性;
[0189]
滑模控制模块,用于基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,获取滑模控制率;
[0190]
滑模抖振抑制模块,用于基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振。
[0191]
作为具体实施例,本发明的构造煤煤层气井下混合物举升的控制系统中,所述的状态反馈线性化解耦模块,具体包括:
[0192]
基于所述的状态空间表达式,获取状态反馈线性化解耦控制率为:
[0193][0194]
将控制率代入线性化模型,则原模型可以描述为:
[0195][0196][0197]
即可实现精确线性化的直接解耦。
[0198]
作为具体实施例,本发明的构造煤煤层气井下混合物举升的控制系统中,所述的改进型smith预估器模块,具体包括:基于所述的状态反馈线性化的直接解耦控制,去除时滞造成的系统不稳定性。对该时滞系统进行时滞平衡后,在原smith预估器的设计基础上,在主反馈回路增加了一个一阶滤波环节g
f
(s),用以降低模型误差与干扰带来的影响。
[0199]
作为具体实施例,本发明的构造煤煤层气井下混合物举升的控制系统中,所述的滑模控制模块,具体包括:
[0200]
基于所述的具有改进型smith预估器的状态反馈线性化的直接解耦控制,获取滑模控制率。
[0201]
定义滑模面:
[0202][0203]
式中,e1=y
1set
‑
y1,e2=y
2set
‑
y2,α为常系数。
[0204]
则
[0205][0206]
式中
[0207][0208]
系数α应使得多项式满足赫尔维茨稳定性判据。
[0209]
控制律选择为:
[0210]
u=g
‑1[d+k
·
sgn(s)
‑
f]
[0211]
式中sgn(s
i
)是符号函数。
[0212][0213]
式中且k1>0,k2>0。
[0214]
作为具体实施例,本发明的构造煤煤层气井下混合物举升的控制系统中,所述的滑模抖振抑制模块,具体包括:
[0215]
基于所述的反馈线性化的滑模控制,利用改进切换函数以抑制系统的抖振。考虑到滑模控制中存在的抖振问题是由于控制率中的符号函数sgn(s)引起的。
[0216]
可选用连续光滑的双曲正切函数作为替代,降低滑模控制中的抖振问题。
[0217][0218]
改进的滑模控制不会影响原来滑模控制的性能,仍具有较强的鲁棒性。
[0219]
图3
‑
5为本具体实施案例部分曲线图,具体说明说下:
[0220]
由图3可以看出改用改进型smith预估器能够很好的去除时滞影响,系统稳定,使用状态反馈线性化后能够很好的实现解耦:在t=40s时仅改变流量信号,实际信号中流量信号发生改变且迅速跟踪,压差信号出现一定的振幅并迅速还原,推测可能是泵转速忽然增大导致控制阀未能及时调节;在t=80s时仅改变压差信号,实际信号中仅压差信号发生改变并迅速跟踪。因此状态反馈线性化后能够很好的实现解耦。
[0221]
由图4可以看出在原有状态反馈精确线性化的基础上增加了滑模控制,系统仍然具有良好的解耦效果,且系统稳定。采用滑模控制后提高了流量调节的稳定性,加快了流量调节的速度。由于引入了滑模控制,因此系统稳定后仍存在抖振现象,需要进一步优化。
[0222]
由图5可以看出采用滑模抖振抑制后,系统仍然具有良好的解耦效果,且系统稳定。对流量调节的影响微乎其微仍具有良好的流量调节性能。采用滑模抖振抑制后,离心泵转速的抖振得到了明显的抑制且避免出现了直接解耦控制中的离心泵的转速为0的情况。
[0223]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0224]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1