一种涡旋机构
1.本实用新型涉及涡旋流体机械技术领域,特别是涉及一种涡旋机构。
背景技术:
2.涡旋流体机械作为储能、动力设备,广泛应用于各个领域,是制冷、气体分离等领域的核心设备之一。涡旋压缩机、涡旋膨胀机、涡旋液体泵等是最常见的涡旋流体机械类型。其中,涡旋压缩机在容积效率、振动、气流脉动、体积等方面均明显优于其它类型的压缩机。
3.涡旋压缩机的主要部件通常包括机架、主轴、偏心小轴(或十字滑环等)、动盘、定盘。其中,动盘和定盘上的涡旋齿型线为基本图形(比如圆、直线、多边形)的渐开线或组合型线等。动涡旋齿、静涡旋齿啮合形成压缩容腔,随着动盘的运动,形成对压缩容腔中流体的压缩。
4.在目前的涡旋压缩机中,由于容腔内流体施加于动盘涡旋齿的轴向力和倾覆力矩,导致动盘易发生倾斜,动盘容易与定盘、机架发生碰撞,存在较为严重的机械摩擦;同时也限制了涡旋齿往更大齿高以及更多圈数的方向设计,上述原因使得目前的涡旋压缩机的工作效率较低。
技术实现要素:
5.有鉴于此,本实用新型主要解决的技术问题是提供一种涡旋机构,能够减少机械摩擦,且允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率。
6.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种涡旋机构。该涡旋机构包括机架和定盘装配体,机架和定盘装配体沿第一参考线相对设置,其中机架和/或定盘装配体设有控制磁体组件,第一参考线与定盘装配体的涡旋齿基圆圆心轴线重合。该涡旋机构还包括动盘装配体,动盘装配体设于机架和定盘装配体之间,其中动盘装配体设有受控磁体组件;控制磁体组件包括第一控制磁体组件和第二控制磁体组件,第一控制磁体组件位于第二参考平面的一侧,第二控制磁体组件位于第二参考平面的另一侧,第一参考线位于第二参考平面内;第一控制磁体组件包括第一电磁铁齿部及绕设于其上的第一电磁铁线圈,第二控制磁体组件包括第二电磁铁齿部及绕设于其上的第二电磁铁线圈,其中第一电磁铁齿部的端面在第一参考平面上的正投影及第二电磁铁齿部的端面在第一参考平面上的正投影均与受控磁体组件的齿部端面在第一参考平面上的正投影存在交叠,第一参考平面垂直于第一参考线。该涡旋机构还包括控制电路,控制电路电连接第一电磁铁线圈和第二电磁铁线圈,用于向第一电磁铁线圈输入第一电流及向第二电磁铁线圈输入第二电流,以控制动盘装配体处于预定姿态,其中第一电流为i
0-i1,第二电流为i0+i1,i0为偏置电流,i1为控制电流。
7.本实用新型的有益效果是:区别于现有技术,本实用新型提供一种涡旋机构。该涡
旋机构的机架和/或定盘装配体设有控制磁体组件,且控制磁体组件包括相对设置的第一控制磁体组件和第二控制磁体组件,即第一控制磁体组件和第二控制磁体组件位于动盘装配体的同一侧。并且,第一控制磁体组件的第一电磁铁线圈输入第一电流,第二控制磁体组件的第二电磁铁线圈输入第二电流,其中第一电流为i
0-i1,第二电流为i0+i1,i0为偏置电流,i1为控制电流,以控制动盘装配体处于预定姿态。
8.第一控制磁体组件和第二控制磁体组件通过差动控制,更便于设计电磁力矩的线性控制器,通过电磁铁克服了倾覆力矩和至少部分的轴向力,使得动盘装配体处于预定姿态,即避免或降低动盘装配体的倾斜,有利于减少动盘装配体与机架、定盘装配体之间的机械摩擦,延长驱动轴承寿命;且为增大涡旋齿尺寸提供了有利条件,即允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率,达到提高单机排气量、容积效率、能效比等目的。
附图说明
9.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的实施例,并与说明书一起用于解释本实用新型的原理。此外,这些附图和文字描述并不是为了通过任何方式限制本实用新型构思的范围,而是通过参考特定实施例为本领域技术人员说明本实用新型的概念。
10.图1是本实用新型涡旋机构一实施例的外形结构示意图;
11.图2是图1所示涡旋机构a-a方向的剖面结构示意图;
12.图3是本实用新型机架一实施例的结构示意图;
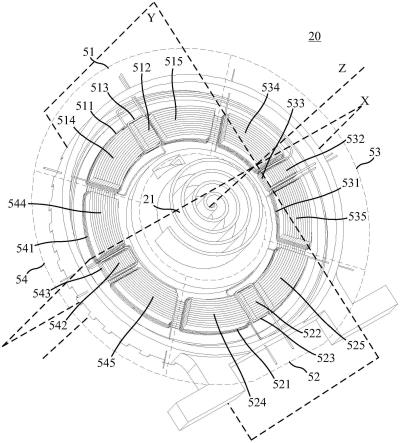
13.图4是本实用新型定盘装配体一实施例的结构示意图;
14.图5是本实用新型电磁铁线圈一实施例的结构示意图;
15.图6是本实用新型控制磁体组件及受控磁体组件在第一参考平面上的正投影一实施例的结构示意图;
16.图7是本实用新型电感线圈一实施例的结构示意图;
17.图8是本实用新型自感位移传感器测量原理一实施例的示意图;
18.图9是本实用新型第一控制磁体组件与受控磁体组件一实施例的结构示意图;
19.图10是本实用新型第二控制磁体组件与受控磁体组件一实施例的结构示意图;
20.图11是本实用新型第三控制磁体组件与受控磁体组件一实施例的结构示意图;
21.图12是本实用新型第四控制磁体组件与受控磁体组件一实施例的结构示意图;
22.图13是本实用新型动盘装配体一实施例的结构示意图;
23.图14是本实用新型动盘装配体另一实施例的结构示意图。
具体实施方式
24.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型的实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
25.为解决现有技术中涡旋压缩机的动盘机械摩擦严重以及涡旋齿齿高以及圈数设计受限的技术问题,本实用新型的一实施例提供一种涡旋机构。该涡旋机构包括机架和定盘装配体,机架和定盘装配体沿第一参考线相对设置,其中机架和/或定盘装配体设有控制磁体组件,第一参考线与定盘装配体的涡旋齿基圆圆心轴线重合。该涡旋机构还包括动盘装配体,动盘装配体设于机架和定盘装配体之间,其中动盘装配体设有受控磁体组件;控制磁体组件包括第一控制磁体组件和第二控制磁体组件,第一控制磁体组件位于第二参考平面的一侧,第二控制磁体组件位于第二参考平面的另一侧,第一参考线位于第二参考平面内。第一控制磁体组件包括第一电磁铁齿部及绕设于其上的第一电磁铁线圈,第二控制磁体组件包括第二电磁铁齿部及绕设于其上的第二电磁铁线圈,其中第一电磁铁齿部的端面在第一参考平面上的正投影及第二电磁铁齿部的端面在第一参考平面上的正投影均与受控磁体组件的齿部端面在第一参考平面上的正投影存在交叠,第一参考平面垂直于第一参考线。该涡旋机构还包括控制电路,控制电路电连接第一电磁铁线圈和第二电磁铁线圈,用于向第一电磁铁线圈输入第一电流及向第二电磁铁线圈输入第二电流,以控制动盘装配体处于预定姿态,其中第一电流为i
0-i1,第二电流为i0+i1,i0为偏置电流,i1为控制电流。以下进行详细阐述。
26.请参阅图1和图2,图1是本实用新型涡旋机构一实施例的外形结构示意图,图2是图1所示涡旋机构a-a方向的剖面结构示意图。需要说明的是,本实用新型所提供的涡旋机构可以应用于涡旋压缩机、涡旋膨胀机以及涡旋液体泵等涡旋流体机械,三者具体的内部结构一致,区别仅在于工作介质或运动方向不同。以下实施例以涡旋机构的具体应用形式为涡旋压缩机为例进行阐述,并非因此对本实用新型涡旋机构的具体应用形式造成限定。
27.在一实施例中,涡旋机构包括机架10和定盘装配体20。机架10和定盘装配体20沿第一参考线(如图2中z所示,下同)相对设置。第一参考线与定盘装配体20的涡旋齿基圆圆心轴线重合。进一步地,定盘装配体20可以通过螺纹连接、焊接、铆接、粘接等方式与机架10固定。涡旋机构还包括动盘装配体30。动盘装配体30设于机架10和定盘装配体20之间,即动盘装配体30设于机架10和定盘装配体20对接形成的空间中。
28.进一步地,动盘装配体30上设有动涡旋齿31,定盘装配体20上设有定涡旋齿21,动涡旋齿31和定涡旋齿21啮合形成压缩容腔,用于容纳并压缩气体。请一并参阅图3,涡旋机构还包括偏心主轴11。偏心主轴11具有主轴段和偏心轴段。偏心主轴11的主轴段装配于机架10上,并能够在机架10上绕其中心轴自转。动盘装配体30远离定盘装配体20的一侧与偏心主轴11的偏心轴段可相对转动连接。偏心主轴11可驱动动盘装配体30运动,以使动涡旋齿31和定涡旋齿21相互配合,不断对压缩容腔中的气体进行压缩。
29.需要说明的是,偏心主轴11的主轴段的中心轴线与第一参考线重合;定盘装配体20上定涡旋齿21对应的基圆圆心位于第一参考线上,且定盘装配体20的中心轴线与第一参考线重合。
30.更进一步地,涡旋机构还包括偏心辅轴12。偏心辅轴12同样具有主轴段和偏心轴段。偏心辅轴12的主轴段装配于机架10上,并能够在机架10上绕其中心轴自转。动盘装配体30远离定盘装配体20的一侧还与偏心辅轴12的偏心轴段可相对转动连接。偏心辅轴12与偏心主轴11配合,用于防止动盘装配体30绕第一参考线公转过程中的自转运动。
31.在本实施例中,由于动涡旋齿31对于动盘装配体30的盘面而言类似悬臂结构,压
缩容腔内的气体向动盘装配体30的动涡旋齿31施加轴向力和倾覆力矩,导致动盘装配体30易发生倾斜,致使动盘装配体30容易与定盘装配体20-发生碰撞,与偏心主轴11、偏心辅轴12之间存在较为严重的机械摩擦,同时也限制了动涡旋齿31和定涡旋齿21往更大齿高以及更多圈数的方向设计,不利于提高涡旋机构的工作效率。
32.有鉴于此,机架10和/或定盘装配体20设有控制磁体组件(包括下文的第一控制磁体组件至第四控制磁体组件等)。也就是说,控制磁体组件可以只设置在机架10上,或控制磁体组件只设置在定盘装配体20上,亦或是机架10和定盘装配体20上均设置有控制磁体组件。本实用新型实施例以控制磁体组件只设置在定盘装配体20为例进行阐述,仅为论述需要,并非因此对本实用新型实施例控制磁体组件的设置方式造成限定。进一步地,控制磁体组件可以设于机架10和/或定盘装配体20的周边位置。
33.动盘装配体30设有受控磁体组件40。通过控制磁体组件和受控磁体组件40配合,控制动盘装配体30处于预定姿态,以避免动盘装配体30与定盘装配体20之间的碰撞,降低动盘装配体30与偏心主轴11、偏心辅轴12之间的机械摩擦,且允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率。进一步地,受控磁体组件40可以设于动盘装配体30的周边位置。
34.预定姿态可以理解为动盘装配体30悬浮于机架10和定盘装配体20之间,动盘装配体30与机架10和定盘装配体20均不接触,并且动盘装配体30处于平衡状态,其姿态保持不变。优选地,当动盘装配体30处于预定姿态时,动盘装配体30不发生倾斜,即动盘装配体30的中心轴与定盘装配体20的中心轴平行,且二者均与第一参考线平行。当然,处于预定姿态的动盘装配体30也可以存在一定程度的倾斜,即动盘装配体30的中心轴与定盘装配体20的中心轴存在一定夹角。
35.请一并参阅图4和图5,图4是本实用新型定盘装配体一实施例的结构示意图,图5是本实用新型电磁铁线圈一实施例的结构示意图。
36.具体地,控制磁体组件包括第一控制磁体组件51和第二控制磁体组件52。换言之,第一控制磁体组件51和第二控制磁体组件52同时位于机架10,和/或同时位于定盘装配体20。
37.第一控制磁体组件51位于第二参考平面(如图4中平面x所示,下同)的一侧,第二控制磁体组件52位于第二参考平面的另一侧。第一参考线位于第二参考平面内,其中第一参考线位于第一控制磁体组件51及第二控制磁体组件52在第二参考平面的正投影的宽度范围内,第二参考平面内的宽度方向为垂直于第一参考线的方向。
38.第一控制磁体组件51包括第一电磁铁齿部(包括下文的第一子电磁铁齿部和第二子电磁铁齿部等)及绕设于其上的第一电磁铁线圈511,第二控制磁体组件52包括第二电磁铁齿部(包括下文的第三子电磁铁齿部和第四子电磁铁齿部等)及绕设于其上的第二电磁铁线圈521。其中,第一电磁铁齿部的端面在第一参考平面(如图6中p所示,下同)上的正投影及第二电磁铁齿部的端面在第一参考平面上的正投影均与受控磁体组件40的齿部(包括下文的第一导磁体齿部至第十二导磁体齿部等)端面在第一参考平面上的正投影存在交叠,第一参考平面垂直于第一参考线。如此一来,第一电磁铁齿部和第二电磁铁齿部产生的磁力能够施加于受控磁体组件40,以控制动盘装配体30处于预定姿态。
39.需要说明的是,电磁铁齿部的端面为电磁铁齿部朝向动盘装配体30上受控磁体组
件40的表面,而受控磁体组件40的齿部端面为受控磁体组件40的齿部朝向控制磁体组件的表面。
40.图6展示了电磁铁齿部的端面在第一参考平面上的正投影与受控磁体组件的齿部端面在第一参考平面上的正投影存在交叠的情况。其中,图6中虚线部分展示了受控磁体组件齿部端面的正投影。
41.涡旋机构还包括控制电路(未图示)。控制电路电连接第一电磁铁线圈511和第二电磁铁线圈521,用于向第一电磁铁线圈511输入第一电流及向第二电磁铁线圈521输入第二电流,以控制动盘装配体30处于预定姿态。第一电流为i
0-i1,第二电流为i0+i1,其中i0为偏置电流,i1为控制电流,如图5所示。换言之,第一控制磁体组件51和第二控制磁体组件52通过差动控制,克服了倾覆力矩和至少部分的轴向力,使得动盘装配体30处于预定姿态,即使得动盘装配体30尽量不发生倾斜,有利于避免动盘装配体30定盘装配体20之间的碰撞,减少动盘装配体30与偏心主轴11、偏心辅轴12之间的机械摩擦;且为增大涡旋齿尺寸提供了有利条件,即允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率,达到提高单机排气量、容积效率、能效比等目的。
42.此外,第一控制磁体组件51和第二控制磁体组件52采用差动控制,使得电磁力矩与电流、工作间隙之间在较大范围内呈线性关系,能够便于涡旋机构的整个控制系统的设计。
43.需要说明的是,上述控制磁体组件只设置在机架10上或控制磁体组件只设置在定盘装配体20上的情况,意味着本实施例仅在动盘装配体30的一侧设置控制磁体组件。相较于机架10和定盘装配体20均设置控制磁体组件的情况而言,本实施例能够减少电磁铁的使用数量,进而减少电磁铁功率放大器的使用,有利于减小该种涡旋机构的功耗。本实用新型实施例以控制磁体组件只设置在定盘装配体20上为例进行阐述,仅为论述需要,并非因此造成限定。
44.第一控制磁体组件51和第二控制磁体组件52用于对动盘装配体30的倾斜进行控制,使动盘装配体30处于预定姿态,优选是动盘装配体30的盘面垂直于第二参考平面。
45.请继续参阅图4。在一实施例中,第一控制磁体组件51和第二控制磁体组件52关于第二参考平面对称。第一控制磁体组件51的齿部几何中心和第二控制磁体组件52的齿部几何中心到第二参考平面的距离相等。如此一来,能够简化控制磁体和受控磁体的结构设计。
46.请参阅图2,图4及图7,图7是本实用新型电感线圈一实施例的结构示意图。
47.在一实施例中,由于在未对动盘装配体30的位移进行测量的情况下,当利用控制磁体组件和受控磁体组件40克服施加于动盘装配体30上的轴向力时,只能根据气体力的理论计算结果调整电磁力的输出。然而由于压缩容腔存在气体泄露,气体力的理论计算结果与实际情况差别较大,难以实现电磁力对轴向气体力的精确平衡。
48.有鉴于此,本实施例控制磁体组件还包括自感位移传感器,利用自感位移传感器对动盘装配体30的位移进行测量,并根据测量结果调整控制磁体组件的电磁力输出,以精确平衡倾覆力矩及克服至少部分的轴向气体力,使得动盘装配体30处于预定姿态。
49.具体地,第一控制磁体组件51还包括第一电感齿部512及绕设于其上的第一电感线圈513,第二控制磁体组件52还包括第二电感齿部522及绕设于其上的第二电感线圈523,第一电感线圈513电连接第二电感线圈523。其中,第一电感线圈513的输出端电连接第二电
感线圈523的输入端,控制电路还电连接第一电感线圈513的输入端及第二电感线圈523的输出端,用于向第一电感线圈513和第二电感线圈523输入高频电压信号,通过检测第一电感线圈513两端电压与第二电感线圈523两端电压之间的差压,并根据电感与间隙(即电感齿部与受控磁体组件40之间的间隙)之间的关系得到动盘装配体30在第一参考线方向上的位移,进而结合动盘几何尺寸得到动盘装配体30的倾斜情况。
50.举例而言,如图7所示,控制电路向第一电感线圈513和第二电感线圈523输入高频电压信号,在第一电感线圈513的输入端和第二电感线圈523的输出端之间输入高频电压信号第一电感线圈513和第二电感线圈523之间连接线路的电位为通过检测差压信号并根据电感与间隙之间的关系,得到动盘装配体30在过第一电感齿部512端面中心和第二电感齿部522端面中心且垂直于第一电感齿部512端面和第一电感齿部522端面的平面内的倾斜角度α,如图8所示。根据得到的倾斜α调整控制磁体组件的电磁力输出,以精确平衡倾覆力矩及克服至少部分的轴向气体力,使得动盘装配体30处于预定姿态。
51.进一步地,请继续参阅图4,第一电磁铁齿部包括第一子电磁铁齿部514和第二子电磁铁齿部515。第一子电磁铁齿部514、第一电感齿部512及第二子电磁铁齿部515绕第一参考线依次分布。第二电磁铁齿部包括第三子电磁铁齿部524和第四子电磁铁齿部525。第三子电磁铁齿部524、第二电感齿部522及第四子电磁铁齿部525绕第一参考线依次分布。
52.可选地,第一电感齿部512位于第一子电磁铁齿部514和第二子电磁铁齿部515之间的中间位置,且第二电感齿部522位于第三子电磁铁齿部524和第四子电磁铁齿部525之间的中间位置,有利于使得控制磁体组件的电磁铁磁力作用位置与电感测量位置保持一致,进而精确平衡倾覆力矩及克服轴向气体力。
53.当然,在本实用新型的其它实施例中,电感齿部也可以设于电磁铁齿部的侧边,通过坐标插值或坐标变换等方式,得到每组差动电磁铁磁力作用平面内的动盘装配体30倾斜角度。其中,坐标插值或坐标变换的具体计算过程,属于本领域技术人员的理解范畴,在此就不再赘述。
54.控制磁体组件还包括铁芯,第一子电磁铁齿部514、第二子电磁铁齿部515、第三子电磁铁齿部524、第四子电磁铁齿部525、第一电感齿部512及第二电感齿部522均为铁芯上朝向受控磁体组件40的齿部结构。进一步地,第一电磁铁线圈511可以绕设于第一子电磁铁齿部514和第二子电磁铁齿部515上,或者第一电磁铁线圈511可以绕设于第一子电磁铁齿部514和第一电感齿部512之间及第二子电磁铁齿部515和第一电感齿部512之间的铁芯轭部上。第二电磁铁线圈521可以绕设于第三子电磁铁齿部524和第四子电磁铁齿部525上,或者第二电磁铁线圈521可以绕设于第三子电磁铁齿部524和第二电感齿部522之间及第四子电磁铁齿部525和第二电感齿部522之间的铁芯轭部上。
55.可选地,铁芯可以由导磁性能良好的材料整体加工制得,或由多个导磁性能良好的叠片叠压而成等,在此不做限定。并且,第一子电磁铁齿部514、第二子电磁铁齿部515、第三子电磁铁齿部524、第四子电磁铁齿部525、第一电感齿部512及第二电感齿部522可以共用一个铁芯。当然,也可以是第一控制磁体组件51和第二控制磁体组件52分别设于不同的铁芯上。
56.更进一步地,请一并参阅图9,第一子电磁铁齿部514与受控磁体组件40齿部的间距和第二子电磁铁齿部515与受控磁体组件40齿部的间距中的较大者为第一间距g1,第一电感齿部512与受控磁体组件40齿部之间具有第二间距g2,第一子电磁铁齿部514与第一电感齿部512的间距和第二子电磁铁齿部515与第一电感齿部512的间距中的较小者为第三间距g3。
57.第一间距g1小于第二间距g2,意味着第一子电磁铁齿部514和第二子电磁铁齿部515与受控磁体组件40齿部之间的距离较近,而第一电感齿部512与受控磁体组件40齿部之间的距离较远。由于气隙的磁阻较大、铁芯的磁阻较小,使得第一电磁铁线圈511所产生磁场的磁路会通过第一子电磁铁齿部514和第二子电磁铁齿部515到达受控磁体组件40,而不会经过第一电感齿部512,即第一电磁铁线圈511所产生磁场的磁路不通过第一电感线圈513,能够避免第一电磁铁线圈511所产生磁场干扰第一电感线圈513的感应电动势,有利于保证受控磁体组件40位移的测量精度和灵敏度。
58.并且根据磁路最短原理,第三间距g3大于第二间距g2,意味着相邻第一子电磁铁齿部514和第一电感齿部512之间的距离及相邻第二子电磁铁齿部515和第一电感齿部512之间的距离均大于第一电感齿部512与受控磁体组件40齿部之间的距离,能够保证第一电感线圈513所产生磁场的磁路到达受控磁体组件40,以避免第一电感线圈513所产生磁场的磁路不经过受控磁体组件40而直接通过相邻的第一子电磁铁齿部514或第二子电磁铁齿部515回到第一电感线圈513。
59.需要说明的是,电感线圈所产生磁场的磁路通过电磁铁线圈。由于电磁铁线圈所产生磁场的强度远大于电感线圈所产生磁场的强度,因此电感线圈所产生磁场的磁路虽然通过电磁铁线圈,但对电磁铁线圈所产生的电磁力不会造成明显的干扰。并且,上述各个间距均指相应结构之间的最小距离。
60.同理,请一并参阅图10,第三子电磁铁齿部524与受控磁体组件40齿部的间距和第四子电磁铁齿部525与受控磁体组件40齿部的间距中的较大者为第四间距g4,第二电感齿部522与受控磁体组件40齿部之间具有第五间距g5,第三子电磁铁齿部524与第二电感齿部522的间距和第四子电磁铁齿部525与第二电感齿部522的间距中的较小者为第六间距g6。其中,第四间距g4小于第五间距g5,第六间距g6大于第五间距g5。
61.请继续参阅图2和图4。在一实施例中,控制磁体组件还包括第三控制磁体组件53和第四控制磁体组件54。换言之,第三控制磁体组件53和第四控制磁体组件54同时位于机架10,和/或同时位于定盘装配体20。第三控制磁体组件53位于第三参考平面(如图4中平面y所示,下同)的一侧,第四控制磁体组件54位于第三参考平面的另一侧,第三控制磁体组件53和第四控制磁体组件54用于对动盘装配体30的倾斜进行控制。同理,动盘装配体30处于预定姿态,优选是动盘装配体30的盘面垂直于第三参考平面。
62.第二参考平面垂直于第三参考平面,且第二参考平面和第三参考平面相交于第一参考线。第一参考线位于第三控制磁体组件53及第四控制磁体组件54在第三参考平面的正投影的宽度范围内,第三参考平面内的宽度方向为垂直于第一参考线的方向。通过对动盘装配体30的倾斜进行控制,目的使动盘装配体30的盘面垂直于第一参考线,最大限度地减少动盘装配体30的倾斜,以及偏心主轴11、偏心辅轴12之间的机械摩擦,且最大限度地允许涡旋机构设计更大齿高以及更多圈数的涡旋齿。
63.并且,第二参考平面垂直于第三参考平面,如图4所示。如此一来,能够使得本实施例控制磁体组件最高效地对动盘装配体30的倾斜进行控制,有利于提高控制效率。
64.请一并参阅图5,第三控制磁体组件53包括第三电磁铁齿部(对应下文描述的第五子电磁铁齿部和第六子电磁铁齿部)及绕设于其上的第三电磁铁线圈531,第四控制磁体组件54包括第四电磁铁齿部(对应下文描述的第七子电磁铁齿部和第八子电磁铁齿部)及绕设于其上的第四电磁铁线圈541。其中,第三电磁铁齿部的端面在第一参考平面上的正投影及第四电磁铁齿部的端面在第一参考平面上的正投影均与受控磁体组件40的齿部端面在第一参考平面上的正投影存在交叠。如此一来,第三电磁铁齿部和第四电磁铁齿部产生的磁力能够施加于受控磁体组件40,以控制动盘装配体30处于预定姿态。
65.控制电路分别电连接第三电磁铁线圈531和第四电磁铁线圈541,用于向第三电磁铁线圈531输入第三电流及向第四电磁铁线圈541输入第四电流,以控制动盘装配体30处于预定姿态。第三电流为i1+i2,第四电流为i
1-i2,其中i1为偏置电流,i2为控制电流。换言之,第三控制磁体组件53和第四控制磁体组件54通过差动控制,便于电磁力矩线性控制系统的设计,通过电磁铁克服了动盘装配体30上的倾覆力矩和至少部分的轴向力,使得动盘装配体30处于预定姿态,即使得动盘装配体30尽量不发生倾斜,有利于避免动盘装配体30与定盘装配体20之间的碰撞,以及降低偏心主轴11、偏心辅轴12之间的机械摩擦;为增大涡旋齿尺寸提供了有利条件,即允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率,达到提高单机排气量、容积效率、能效比等目的。
66.请继续参阅图4。在一实施例中,第三控制磁体组件53和第四控制磁体组件54关于第三参考平面对称。,第三控制磁体组件53的齿部几何中心和第四控制磁体组件54的齿部几何中心到第三参考平面的距离相等。如此一来,能够简化控制磁体和受控磁体的结构设计。
67.请一并参阅图7。在一实施例中,第三控制磁体组件53还包括第三电感齿部532及绕设于其上的第三电感线圈533,第四控制磁体组件54还包括第四电感齿部542及绕设于其上的第四电感线圈543,第三电感线圈533电连接第四电感线圈543。其中,第三电感线圈533的输出端电连接第四电感线圈543的输入端,控制电路还电连接第三电感线圈533的输入端及第四电感线圈543的输出端,用于向第三电感线圈533和第四电感线圈543输入高频电压信号,通过检测第三电感线圈533两端电势差与第四电感线圈543两端电势差之间的差压,并根据电感与间隙之间的关系得到动盘装配体30在过第三电感齿部532端面中心和第四电感齿部542端面中心且垂直于第三电感齿部532端面和第四电感齿部542端面的平面内的倾斜角度β,即测量得到动盘装配体30的倾斜情况。
68.举例而言,控制电路向第三电感线圈533和第四电感线圈543输入高频电压信号,第三电感线圈533的输入端和第四电感线圈543的输出端之间电压为第三电感线圈533和第四电感线圈543之间连接线路的电位为通过检测差压信号并根据电感与间隙之间的关系,得到过第三电感齿部532端面中心和第四电感齿部542端面中心且垂直于第三电感齿部532端面和第四电感齿部542端面的平面内的倾斜角度β。根据得到的倾斜角度β调整控制磁体组件的电磁力输出,以精确平衡倾覆力矩及克服至少部分的轴向气体力,使得动盘装配体30处于预定姿态。
69.进一步地,第三电磁铁齿部包括第五子电磁铁齿部534和第六子电磁铁齿部535。第五子电磁铁齿部534、第三电感齿部532及第六子电磁铁齿部535绕第一参考线依次分布。第四电磁铁齿部包括第七子电磁铁齿部544和第八子电磁铁齿部545。第七子电磁铁齿部544、第四电感齿部542及第八子电磁铁齿部545绕第一参考线依次分布。
70.可选地,第三电感齿部532位于第五子电磁铁齿部534和第六子电磁铁齿部535之间的中间位置,且第四电感齿部542位于第七子电磁铁齿部544和第八子电磁铁齿部545之间的中间位置,有利于使得控制磁体组件的电磁铁磁力作用位置与电感测量位置保持一致,进而精确平衡倾覆力矩及克服轴向气体力。
71.第五子电磁铁齿部534、第六子电磁铁齿部535、第七子电磁铁齿部544、第八子电磁铁齿部545、第三电感齿部532及第四电感齿部542均为铁芯上的朝向受控磁体组件40的齿部结构。进一步地,第三电磁铁线圈531可以绕设于第五子电磁铁齿部534和第六子电磁铁齿部535上,或者第三电磁铁线圈531可以绕设于第五子电磁铁齿部534和第三电感齿部532之间及第六子电磁铁齿部535和第三电感齿部532之间的铁芯轭部上。第四电磁铁线圈541可以绕设于第七子电磁铁齿部544和第八子电磁铁齿部545上,或者第四电磁铁线圈541可以绕设于第七子电磁铁齿部544和第四电感齿部542之间及第八子电磁铁齿部545和第四电感齿部542之间的铁芯轭部上。
72.更进一步地,请一并参阅图11,第五子电磁铁齿部534与受控磁体组件40齿部的间距和第六子电磁铁齿部535与受控磁体组件40齿部的间距中的较大者为第七间距g7,第三电感齿部532与受控磁体组件40齿部之间具有第八间距g8,第五子电磁铁齿部534与第三电感齿部532的间距和第六子电磁铁齿部535与第三电感齿部532的间距中的较小者为第九间距g9。其中,第七间距g7小于第八间距g8,第九间距g9大于第八间距g8。
73.同理,请一并参阅图12,第七子电磁铁齿部544与受控磁体组件40齿部的间距和第八子电磁铁齿部545与受控磁体组件40齿部的间距中的较大者为第十间距g10,第四电感齿部542与受控磁体组件40齿部之间具有第十一间距g11,第七子电磁铁齿部544与第四电感齿部542的间距和第八子电磁铁齿部545与第四电感齿部542的间距中的较小者为第十二间距g12。其中,第十间距g10小于第十一间距g11,第十二间距g12大于第十一间距g11。
74.需要说明的是,本实用新型实施例第一间距g1至第十二间距g12均指相应结构之间的最小间距。
75.请继续参阅图4。在一实施例中,对于上述控制磁体组件包括第一控制磁体组件51、第二控制磁体组件52、第三控制磁体组件53及第四控制磁体组件54的情况,属于不同控制磁体组件且相邻的两个子电磁铁齿部端面的极性相同,以保证属于同一电磁铁齿部的子电磁铁齿部之间能够形成闭合磁路。
76.举例而言,第一子电磁铁齿部514至第八子电磁铁齿部545端面的极性沿第一参考线的周向依次为nssnnssn,例如使得第一电磁铁齿部的第一子电磁铁齿部514和第二子电磁铁齿部515之间能够形成闭合磁路,以此类推。
77.请参阅图2、图6、图13和图14,图13是本实用新型动盘装配体一实施例的结构示意图,图14是本实用新型动盘装配体另一实施例的结构示意图。其中,图14中展示了动盘装配体30上各导磁体齿部朝向控制磁体组件的端面。
78.在一实施例中,受控磁体组件40包括第一导磁体齿部401至第十二导磁体齿部
412。
79.第一导磁体齿部401对应第一子电磁铁齿部514,第二导磁体齿部402对应第二子电磁铁齿部515,第三导磁体齿部403对应第三子电磁铁齿部524,第四导磁体齿部404对应第四子电磁铁齿部525,第五导磁体齿部405对应第五子电磁铁齿部534,第六导磁体齿部406对应第六子电磁铁齿部535,第七导磁体齿部407对应第七子电磁铁齿部544,第八导磁体齿部408对应第八子电磁铁齿部545,第九导磁体齿部409对应第一电感齿部512,第十导磁体齿部410对应第二电感齿部522,第十一导磁体齿部411对应第三电感齿部532,第十二导磁体齿部412对应第四电感齿部542。
80.在动盘装配体30相对机架10和定盘装配体20运动的过程中,动盘装配体30的导磁体齿部的端面在第一参考平面上的正投影始终处于其对应控制磁体齿部(包括子电磁铁齿部和电感齿部)的端面在第一参考平面上的正投影中,如此能够保证动盘装配体30的导磁体齿部端面与其对应控制磁体齿部端面的正投影重叠部分的形状、面积始终保持一致,进而保证电磁铁磁力和电感磁力作用于受控磁体组件40的位置保持不变,有利于电磁力矩线性控制系统的设计。
81.第一导磁体齿部401和第二导磁体齿部402位于第四参考平面m的同一侧、第三导磁体齿部403和第四导磁体齿部404位于第四参考平面m的另一侧,且第一导磁体齿部401和第二导磁体齿部402分别位于第五参考平面t的两侧,第三导磁体齿部403和第四导磁体齿部404分别位于第五参考平面t的两侧。第五导磁体齿部405和第六导磁体齿部406位于第五参考平面t的同一侧,第七导磁体齿部407和第八导磁体齿部408位于第五参考平面t的另一侧,且第五导磁体齿部405和第六导磁体齿部406分别位于第四参考平面m的两侧,第七导磁体齿部407和第八导磁体齿部408分别位于第四参考平面m的两侧。
82.其中,第四参考平面m垂直于第五参考平面t,且第四参考平面m和第五参考平面t相交于动盘装配体30的涡旋齿基圆圆心轴线。换言之,动盘装配体30上动涡旋齿31所对应基圆的圆心处于该轴线,且该轴线垂直于动盘装配体30的盘面。
83.如图6所示,当动盘装配体30上动涡旋齿31所对应基圆的圆心轴线与定盘装配体20上定涡旋齿21所对应基圆的圆心轴线重合、动盘装配体30的第四参考平面m和定盘装配体20的第二参考平面重合及动盘装配体30的第五参考平面t和定盘装配体20的第三参考平面重合时,第一导磁体齿部401在第一参考平面上正投影的各个边缘与第一子电磁铁齿部514在第一参考平面上正投影的边缘之间的距离均大于或等于偏心主轴11的偏心距,即图6中d1、d2、d3、d4均大于或等于偏心主轴11的偏心距,以此类推。
84.受控磁体组件40的第一导磁体齿部401至第十二导磁体齿部412均为铁芯上朝向控制磁体组件的齿部结构。可选地,第一导磁体齿部401至第十二导磁体齿部412可以共用一个铁芯,也可以第一导磁体齿部、第二导磁体齿部、第三导磁体齿部及第四导磁体齿部分别设于不同的铁芯上。
85.在一实施例中,第一导磁体齿部401的端面面积为a1,第一导磁体齿部401的端面中心至第四参考平面m的距离为h1,第一导磁体齿部401的端面中心至第五参考平面t的距离为l1,第二导磁体齿部402的端面面积为a2,第二导磁体齿部402的端面中心至第四参考平面m的距离为h2,第二导磁体齿部402的端面中心至第五参考平面t的距离为l2。
86.第三导磁体齿部403的端面面积为a3,第三导磁体齿部403的端面中心至第四参考
平面m的距离为h3,第三导磁体齿部403的端面中心至第五参考平面t的距离为l3,第四导磁体齿部404的端面面积为a4,第四导磁体齿部404的端面中心至第四参考平面m的距离为h4,第四导磁体齿部404的端面中心至第五参考平面t的距离为l4。
87.第一电磁铁线圈的匝数为n1,第二电磁铁线圈的匝数为n2。
88.由于
89.r
m1
、r
m2
为控制磁体组件的两组导磁体齿部与子电磁铁齿部工作间隙的磁阻,y1、y2为控制磁体组件的两组导磁体齿部与子电磁铁齿部的工作间隙,μ0为工作间隙内介质的相对磁导率,φ为磁通量,i为电磁铁工作电流,n为电磁铁线圈匝数。当第一电磁铁线圈匝数为n1,输入电流为i1=(i
0-i)时,得到
90.故
91.当第二电磁铁线圈匝数为n2,输入电流为i2=(i0+i)时,得到
[0092][0093][0094]
其中,x1=c-h1α,x2=c-h2α,x3=c+h3α,x4=c+h4α,b1、b2、b3、b4为各电磁铁齿部端面的平均磁感强度,c为动盘装配体30位于平衡位置时导磁体齿部端面到对应子电磁铁齿部端面的距离,α为动盘装配体30在第五参考平面t内的倾斜角度;
[0095]
根据电磁力计算公式:
[0096][0097]
由此得到第一控制磁体组件和第二控制磁体组件的电磁力对位于第五参考平面t且和第四参考平面m垂直的轴线的力矩m
t
、位于第四参考平面m且和第五参考平面t垂直的轴线的力矩mm:
[0098][0099]
要求无论a1、a2、i、n1、n2、l1、l2如何变化,m
t
=0;
[0100]
故得到a2l1=a1l2,a4l3=a3l4,
[0101][0102]
在α=0,i=0处对mm进行泰勒展开得到:
[0103][0104]
其中
[0105][0106][0107][0108][0109][0110][0111]
由于α、i为小量,故当时,可得到mm[0112]
关于α、i的近似线性表达式,由此得到
[0113]
[0114][0115]
第五导磁体齿部405的端面面积为a5,第五导磁体齿部405的端面中心至第五参考平面t的距离为h5,第五导磁体齿部405的端面中心至第四参考平面m的距离为l5,第六导磁体齿部406的端面面积为a6,第六导磁体齿部406的端面中心至第五参考平面t的距离为h6,第六导磁体齿部406的端面中心至第四参考平面m的距离为l6。
[0116]
第七导磁体齿部407的端面面积为a7,第七导磁体齿部407的端面中心至第五参考平面t的距离为h7,第七导磁体齿部407的端面中心至第四参考平面m的距离为l7,第八导磁体齿部408的端面面积为a8,第八导磁体齿部408的端面中心至第五参考平面t的距离为h8,第八导磁体齿部408的端面中心至第四参考平面m的距离为l8。
[0117]
第三电磁铁线圈的匝数为n3,第四电磁铁线圈的匝数为n4。
[0118]
同理,l5a6=l6a5,l7a8=l8a7,,
[0119]
下文以第一控制磁体组件的电感传感器和第二控制磁体组件的电感传感器为例,阐述本实用新型实施例测量动盘装配体30倾斜情况的原理。
[0120][0121]
忽略得到
[0122]bα
=μ0ni/(2x)
[0123]
ψ=nab
α
=n2aμ0i/(2x)
[0124][0125]
第一电感线圈和第二电感线圈产生的感应电动势为:
[0126][0127][0128]
其中,g为当动盘装配体30平衡时第九导磁体齿部409到第一电感齿部的距离及第十导磁体齿部410到第二电感齿部的距离,第九导磁体齿部409和第十导磁体齿部410之间的距离为2c,且第九导磁体齿部409和第十导磁体齿部410到第四参考平面m的距离均为c,n为第一电感线圈和第二电感线圈的匝数,a为第九导磁体齿部409和第十导磁体齿部410的端面面积,α为动盘装配体30的倾斜角度;
[0129]
规定磁路背离衔铁向上为正向,则供电电源与感应电动势之间的关系为:
[0130][0131]
第一电感线圈和第二电感线圈两端的输出差压为:
[0132][0133]
故
[0134]
可见,第一电感线圈和第二电感线圈两端的输出差压和输入电压的比值与动盘装配体30的倾斜角度α呈线性关系。利用第一控制磁体组件和第二控制磁体组件的电感传感器可以方便地测量动盘装配体30的倾斜角度,且能够方便整个控制系统的设计。
[0135]
若第九导磁体齿部409到第四参考平面m的距离为c1,第十导磁体齿部410到第四参考平面m的距离为c2,则
[0136][0137][0138][0139]
差压与输入电压之比b与α的关系为:
[0140][0141]
可见,在电感传感器的设计中,允许九导磁体齿部409到第四参考平面m的距离与第十导磁体齿部410到第四参考平面m的距离不相等。
[0142]
综上所述,本实用新型所提供的涡旋机构,通过其第一控制磁体组件和第二控制磁体组件差动控制,第三控制磁体组件和第四控制磁体组件的差动控制,便于电磁力矩线性控制系统的设计,克服了动盘装配体上的倾覆力矩和至少部分的轴向力,使得动盘装配体处于预定姿态,即使得动盘装配体尽量不发生倾斜,有利于减少动盘装配体与机架、定盘装配体之间的机械摩擦;且为增大涡旋齿尺寸提供了有利条件,即允许涡旋机构设计更大齿高以及更多圈数的涡旋齿,进而提高涡旋机构的工作效率,达到提高单机排气量、容积效率、能效比等目的。
[0143]
并且,本实用新型涡旋机构利用电机驱动动盘装配体运动,即利用电机驱动偏心主轴转动,以带动动盘装配体运动,方便控制动盘装配体沿着预设轨迹运动。在现有技术中,也有用线性电磁作动器直接控制动盘在平面内移动,其主要存在以下缺点:由于电磁铁受工作间隙影响较大,当电磁铁工作间隙较大时,电磁力较小,难以平衡倾覆力矩及气体力;而当电磁铁工作间隙较小时,动盘的移动半径受电磁铁工作间隙的限制,导致压缩腔容积较小,整机排气量较低;并且,电磁铁的阻尼较小,而在动盘移动一周的过程中动盘所受到气体力的方向和大小不断变化,因此动盘容易产生振荡,难以控制其沿着预设轨迹运动,不利于保证气体压缩的效率、增大压缩容腔容积及提高排气量。
[0144]
此外,在本实用新型中,除非另有明确的规定和限定,术语“相连”、“连接”、“层叠”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0145]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1