联轴器布置的制作方法
1.本公开涉及一种用于在第一可旋转轴和第二可旋转轴之间进行连接的联轴器布置。联轴器布置特别适用在车辆的可旋转轴之间,并且更特别地用于车辆的上部转向柱和下部转向柱之间的连接。虽然将主要关于卡车描述联轴器布置,但是其也适用于包括用于可旋转轴之间的连接的联轴器布置的其它类型的车辆。
背景技术:
2.旋转轴之间的联轴器布置用于多种应用。特别地,联轴器布置用于在两个轴之间传递动力,优选地通过等速万向节实现,其中,在联轴器布置的每一侧上的旋转速度和角旋转是相同的,在联轴器的每一侧上的轴之间提供所谓的1:1比率。
3.在汽车行业中,上述类型的联轴器布置经常用于转向柱中,以便能够在可连接到方向盘的上部转向柱和可间接地连接到车辆车轮的下部转向柱之间提供角位移。
4.因而,用于车辆的联轴器布置能够在与其连接的第一轴和第二轴之间进行角位移。但是,为了例如为了提高联轴器布置的灵活性和应用,期望还能够在与联轴器布置连接的轴之间提供线性位移。
技术实现要素:
5.本公开的目的在于描述一种至少部分地克服上述缺陷的联轴器布置。该目的通过根据权利要求1所述的联轴器布置实现。
6.根据第一方面,提供了一种用于在第一可旋转轴和第二可旋转轴之间连接的联轴器布置,所述联轴器布置包括:第一可旋转部分,所述第一可旋转部分能够连接到所述第一可旋转轴;第一往复运动元件,所述第一往复运动元件在第一互连部分处机械连接到所述第一可旋转部分,以将来自所述第一可旋转部分的旋转运动转换成所述第一往复运动元件的线性运动;第二可旋转部分,所述第二可旋转部分能够连接到所述第二可旋转轴;第二往复运动元件,所述第二往复运动元件在第二互连部分处机械连接到所述第二可旋转部分,以将来自所述第二往复运动元件的线性运动转换成所述第二可旋转部分的旋转运动;以及连接元件,所述连接元件可旋转地连接到所述第一往复运动元件和所述第二往复运动元件中的每一个,以允许所述连接元件分别与所述第一往复运动元件和所述第二往复运动元件之间的相对旋转。
7.措辞“互连部分”应被解释为可旋转部分与往复运动部分之间的机械接口,其中,来自可旋转部分的旋转运动被转换成往复运动元件的往复运动部分,反之亦然。因此,第一往复运动元件和第一可旋转部分在第一互连部分处彼此机械连接。第一互连部分可以形成第一往复运动元件或第一可旋转部分中的任一个的一部分。
8.通过上述方式,第一可旋转部分的旋转运动(即第一可旋转轴的旋转运动)在第一互连部分处转换成往复运动,以便由第一往复运动元件提供往复运动。连接元件由此沿与第一往复运动元件相同的方向移动。由于第二往复运动元件也连接到连接元件,因此第二
往复运动元件将会沿与第一往复运动元件相同的方向往复运动。第二往复运动元件的往复运动将会在第二互连部分处转换成旋转运动,因而提供第二可旋转部分的旋转,并且进而提供第二可旋转轴的旋转。换句话说,旋转运动将转换成往复运动,由此,往复运动再次转换成旋转运动。第一可旋转轴和第二可旋转轴由此将会以相同的速度并且沿相同的旋转方向旋转。
9.本公开基于这样的认识,即通过借助于至少一个连接元件将第一往复运动元件和第二往复运动元件可旋转地彼此连接,可以实现第一可旋转部分和第二可旋转部分之间的角位移以及轴向位移两者。因而,优点在于联轴器布置能够实现第一可旋转轴和第二可旋转轴之间的动力传递,同时允许角位移、轴向位移或者角位移和轴向位移两者的组合。对于纯角位移,第一往复运动元件和第二往复运动元件中的一个围绕连接元件旋转,而对于角位移和轴向位移的组合,第一往复运动元件和第二往复运动元件两者都围绕连接元件旋转。对于第一可旋转轴和第二可旋转轴之间的纯轴向位移,第一往复运动元件和第二往复运动元件两者都围绕连接元件旋转。因而,实现了能够在可旋转轴之间进行位移的进一步自由度。
10.根据示例实施例,连接元件可以是第一连接元件,联轴器布置可以进一步包括第二连接元件,该第二连接元件可旋转地连接到第一往复运动元件和第二往复运动元件中的每一个,其中,第一连接元件和第二连接元件被定位在第一往复运动元件和第二往复运动元件的相应端部上。
11.由此,实现了联轴器布置的更大稳定性。
12.根据示例实施例,联轴器布置可以包括轴承布置,该轴承布置在连接元件和第一往复运动元件之间,轴承布置允许连接元件围绕由第一往复运动元件的纵向延伸部限定的几何轴线旋转。
13.轴承布置可以是任何合适的类型,以允许连接元件围绕由第一往复运动元件的纵向延伸部限定的几何轴线旋转。
14.根据示例实施例,轴承布置可以被布置成防止连接元件和第一往复运动元件之间的相对线性运动。
15.也可以提供其它措施来防止相对线性运动。例如,代替使用防止相对线性运动的专用轴承,可以提供连接到往复运动元件的圆周沟槽中的弹簧挡圈(circlips),该弹簧挡圈被布置成与连接元件的外端表面邻接。作为进一步示例,垫圈板可以连接在往复运动元件和连接元件之间。例如,垫圈板可以连接在往复运动元件的外端部处。
16.根据示例实施例,轴承布置可以是第一轴承布置,联轴器布置可以包括第二轴承布置,该第二轴承布置在连接元件和第二往复运动元件之间,该第二轴承布置允许连接元件围绕由第二往复运动元件的纵向延伸部限定的几何轴线旋转。
17.根据示例实施例,第一往复运动元件的线性运动方向可以垂直于以下轴线,第一可旋转部分围绕该轴线旋转。
18.根据示例实施例,第二往复运动元件的线性运动方向可以垂直于以下轴线,第二可旋转部分围绕该轴线旋转。
19.根据示例实施例,第一互连部分可以包括第一细长沟槽和第一销,第一销能够在第一细长沟槽的端部之间滑动,其中,第一销被偏心地连接到第一可旋转部分,并且其中,
第一细长沟槽连接到第一往复运动元件。
20.由此,当第一可旋转部分旋转时,第一销将会沿周向方向移动。当第一销被布置在第一细长沟槽内时,该销将会在第一细长沟槽的端部之间线性地移动,由此提供往复运动元件的线性往复运动。第一细长沟槽优选地竖直延伸,使得第一销在端部之间上下移动。“端部”应被解释为细长沟槽内的在其处第一销的运动方向改变的位置。
21.还应容易理解,细长沟槽可以以不同的方式布置。例如,细长沟槽可以被布置成细长的通孔,或者被布置成凹进形式的细长沟槽,即非通孔。
22.根据示例实施例,第一细长沟槽可以在基本垂直于第一往复运动元件的延伸部的方向上是细长的。如上所述,这里的第一销沿竖直方向在第一细长沟槽的上端部和下端部之间移动。
23.根据示例实施例,第二互连部分可以包括第二细长沟槽和第二销,第二销能够在第二细长沟槽的端部之间滑动,其中,第二销被偏心地连接到第二可旋转部分,并且其中,第二细长沟槽连接到第二往复运动元件。
24.与上述第一互连部分相同的效果和特征也适用于第二互连部分。因而,第一互连部分和第二互连部分可以被布置成对称部件。
25.根据示例实施例,联轴器布置可以进一步包括第一支撑支架和第二支撑支架,该第一支撑支架和第二支撑支架在第一可旋转部分的相应侧上连接到第一往复运动元件。
26.支撑支架有利地连接到例如车辆的联轴器布置设置在其处的固定部件。由此,联轴器元件充分地连接到该固定部件。
27.根据示例实施例,第一支撑支架和第二支撑支架可以可滑动地连接到第一往复运动元件,以允许第一往复运动元件与第一支撑支架和第二支撑支架之间的分别的线性运动。
28.因而,往复运动元件在第一支撑支架和第二支撑支架的通孔内移动。优选地,通孔和往复运动元件之间的接口包括某种低摩擦元件。
29.根据示例实施例,第一支架和第二支架可以限定第一往复运动元件的线性运动的幅度的相应端部位置。
30.因而,线性往复运动将会具有明确限定的端部位置,因而这也将会约束第一可旋转轴的旋转。
31.根据示例实施例,联轴器布置可以进一步包括第三支撑支架和第四支撑支架,该第三支撑支架和第四支撑支架在第二可旋转部分的相应侧上连接到第二往复运动元件。
32.第三支撑支架和第四支撑支架可以优选地以与第一支撑支架和第二支撑支架类似的方式布置。因而,第三支撑支架和第四支撑支架的效果和特征在很大程度上类似于针对第一支撑支架和第二支撑支架所述的那些效果和特征。
33.根据示例实施例,联轴器布置可以是转向柱联轴器,该转向柱联轴器能够连接在第一可旋转轴和第二可旋转轴之间,其中该第一可旋转轴呈能够连接到车辆的方向盘的上部转向柱形式,该第二可旋转轴呈能够连接到车辆的车轮的下部转向柱形式。
34.使用用于转向柱联轴器应用的联轴器布置,特别的优点在于实现了沿角度方向和轴向方向移动方向盘的更大灵活性。由此,实现了转向柱的简化缩回,即转向柱能够以简化的方式缩回。因此,方向盘可以调整到特定位置,该位置对于车辆的每个驾驶员都是唯一
的。由此实现了改进的安全性,因为例如可以为每个驾驶员单独调整潜在的安全气囊部署。
35.应注意,措辞“能够连接到车辆的方向盘的上部转向柱”不应被解释为上部转向柱直接连接到方向盘。自然地,中间元件可以存在于上部转向柱和方向盘之间。类似地,措词“能够连接到车辆车轮的下部转向柱”不应被解释为下部转向柱直接连接到车轮。例如,下部转向柱可以经由例如轮轴、齿轮齿条连接等连接到车辆的车轮。
36.根据第二方面,提供了一种车辆,该车辆包括第一可旋转轴、第二可旋转轴以及根据上文关于第一方面所述的实施例中的任一个所述的联轴器布置,该联轴器布置连接在第一可旋转轴和第二可旋转轴之间。
37.根据示例实施例,第一可旋转轴可以是连接到车辆的方向盘的上部转向柱,并且第二轴是连接到车辆的一对可转向轮的下部转向柱。
38.第二方面的效果和特征在很大程度上类似于上文关于第一方面所描述的效果和特征。
39.当研究所附权利要求和以下说明时,进一步的特征和优点将变得显而易见。本领域技术人员应认识到,在不脱离本公开的范围的情况下,可以组合不同的特征来产生除下文所述的那些实施例之外的实施例。
附图说明
40.通过以下例证性实施例的说明性和非限制性详细说明,将更好地理解上述以及附加的目的、特征和优点,其中:
41.图1是示出卡车形式的车辆的示例实施例的横向侧视图;
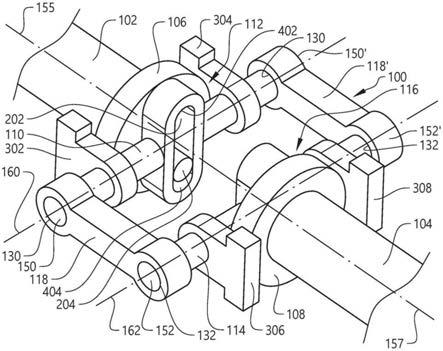
42.图2是根据示例实施例的联轴器布置的透视图;
43.图3是图2中的联轴器布置受到角位移时的侧视图;以及
44.图4是图2中的联轴器布置受到线性位移时的侧视图。
具体实施方式
45.现在将在下文中参考附图更全面地描述本公开,其中示出了例证性实施例。但是,本公开可以以许多不同的形式体现并且不应被解释为限于本文阐述的实施例;相反,提供这些实施例是为了彻底和完整。在整个说明中,相同的附图标记都指代相同的元件。
46.特别参考图1,其中提供了卡车形式的车辆10。车辆10包括用于使车辆的前转向轮30转向的方向盘20。图1中的车辆10特别适合使用如下文将进一步所述的联轴器布置。在图1中所示的示例中,联轴器布置100被布置成转向柱联轴器,该转向柱联轴器连接在第一可旋转轴102和第二可旋转轴104之间,其中该第一可旋转轴102呈能够连接到方向盘20的上部转向柱形式,该第二可旋转轴104呈能够连接到车辆10的车轮30的下部转向柱形式。
47.为了进一步详细地描述联轴器布置,参考图2至图4。从图2开始,图2是根据示例实施例的联轴器布置的透视图。可以看出,联轴器布置100包括连接到第一可旋转轴102的第一可旋转部分106。联轴器布置100进一步包括第一互连部分112和第一往复运动元件110。可以看出,第一互连部分112包括:第一细长沟槽202,该第一细长沟槽在第一细长壁部分内,该第一细长壁部分机械地连接到第一往复运动元件110;以及第一销204,该第一销偏心地连接到第一可旋转部分106。第一销204优选地被布置成在第一细长沟槽202的上端部402
和下端部404之间滑动。
48.此外,联轴器布置100进一步包括连接到第二可旋转轴104的第二可旋转部分108。联轴器布置100进一步包括第二互连部分116和第二往复运动元件114。以与第一互连部分112类似的方式,虽然未示出,但是第二互连部分116包括:第二细长沟槽,该第二细长沟槽在第二细长壁部分内,该第二细长壁部分机械地连接到第二往复运动元件114;以及第二销,该第二销偏心地连接到第二可旋转部分108。第二销优选地被布置成在第二细长沟槽的上端部和下端部之间滑动。
49.联轴器布置100进一步包括第一连接元件118和第二连接元件118’。第一连接元件118和第二连接元件118’分别各自可旋转地连接到第一往复运动元件110和第二往复运动元件114。
50.因此,第一往复运动元件110可以分别相对于第一连接元件118和第二连接元件118’的第一端部150、150’旋转。换言之,第一往复运动元件110可以相对于第一连接元件118和第二连接元件118’围绕沿着第一往复运动元件110的延伸部延伸的几何轴线160旋转。优选地,联轴器布置100包括轴承布置130,该轴承布置分别在第一往复运动元件110与连接元件118、118’之间。
51.以类似的方式,第二往复运动元件114在这里可以分别相对于第一连接元件118和第二连接元件118’的第二端部152、152’旋转。换言之,第二往复运动元件114可以相对于第一连接元件118和第二连接元件118’围绕沿着第二往复运动元件114的延伸部延伸的几何轴线162旋转。优选地,联轴器布置100包括第二轴承布置132,该轴承布置分别在第二往复运动元件114与连接元件118、118’之间。
52.此外,第一连接元件118和第二连接元件118’被优选地布置成跟随第一往复运动元件110和第二往复运动元件114的线性往复运动。当第一往复运动元件110沿着几何轴线160移动时,第一连接元件118和第二连接元件118’将沿相同方向移动,即沿几何轴线160的方向移动。由此,第二往复运动元件114将沿着几何轴线162移动。因而防止了第一往复运动元件110和第二往复运动元件114以及连接元件118、118’中的每一个之间的相对线性运动。
53.下面将描述联轴器布置100在其使用期间的运动模式。当第一可旋转轴102旋转时,第一可旋转部分106也将旋转。当第一可旋转部分106旋转时,第一互连部分112将旋转运动转换成第一往复运动元件110的直线运动。具体而言,第一销204在第一可旋转元件106的旋转期间将沿该第一可旋转元件106的周向方向移动。由于第一销204可滑动地连接到细长沟槽202,因此第一销204将会在细长沟槽202的端部402、404之间移动,由此第一往复运动元件110将会沿着几何轴线160移动,即沿垂直于轴线155的方向移动,其中第一可旋转部分106围绕轴线155旋转。
54.如上所述,第一连接元件118和第二连接元件118’连接到第一往复运动元件110,以便遵循其往复运动。这样,当第一往复运动元件110线性地往复运动时,第一连接元件118和第二连接元件118’也沿几何轴线160的方向线性地移动。由此,第二往复运动元件114将会受到线性运动,该线性运动的幅度和速度与第一往复运动元件110的线性运动相同。第二往复运动元件114将会沿着几何轴线162的方向线性地移动。
55.第二往复运动元件114通过第二互连部分116连接到第二可旋转部分108。第二互连部分116优选地与上述第一互连部分112类似。因而,第二往复运动元件114的线性往复运
动通过第二互连部分116转换成第二可旋转部分108的旋转运动。第二往复运动元件114的线性运动优选地在垂直于轴线157的方向上,其中第二可旋转部分108围绕轴线157旋转。
56.通过上述内容,第一可旋转部分106和第二可旋转部分108将会沿相对于其相应轴线155、157的相同方向并且以相同的旋转速度旋转。
57.如图2中进一步所示的,联轴器布置还包括第一支撑支架302、第二支撑支架304、第三支撑支架306以及第四支撑支架308。第一支撑支架302和第二支撑支架304在第一可旋转部分106的相应侧处可滑动地连接到第一往复运动元件110,而第三支撑支架306和第四支撑支架308在第二可旋转部分108的相应侧处可滑动地连接到第二往复运动元件114。支撑支架302、304、306、308可以分别限定用于第一往复运动元件和第二往复运动元件的线性运动的幅度的端部。
58.支撑支架被布置成将联轴器布置连接到一个或多个固定部分。当使用联轴器布置100作为转向柱联轴器时,第三支撑支架306和第四支撑支架308优选地在特定位置固定地连接联轴器布置100,而第一支撑支架302和第二支撑支架304连接到可调部分,使得方向盘的位置可以调节。
59.现在参考图3,图3是上文关于图2所述的联轴器布置100的侧视图。特别地,图3中的联轴器布置100受到角位移。从图3中可以看出,第一连接元件118和第二连接元件118’已经围绕第一往复运动元件110旋转,即围绕几何轴线160旋转。换言之,第一往复运动元件110和连接元件118、118’相对于彼此旋转。但是,第二往复运动元件114还未相对于连接元件118、118’旋转。这样,实现了第一可旋转轴102和第二可旋转轴104之间的角位移。
60.参考图4,图4是图2中的联轴器布置受到线性位移时的侧视图。从图4中可以看出,第一连接元件118和第二连接元件118’以与图3中所示的示例类似的方式围绕第一往复运动元件110旋转。但是,第一连接元件118和第二连接元件118’还围绕第二往复运动元件114旋转,即围绕几何轴线162旋转。因此,第一可旋转轴102和第二可旋转轴104纯线性位移。
61.尽管未示出,但是当然可以通过上述联轴器布置来实现组合的角位移和线性位移。这是通过以不同的幅度旋转第一往复运动元件110和第二往复运动元件114来实现的,使得例如与第二往复运动元件114围绕其几何轴线162的旋转相比,第一往复运动元件110围绕几何轴线160旋转的程度更大。
62.应理解,本公开不限于上文所述和附图中所示的实施例;相反,本领域技术人员应认识到在所附权利要求的范围内可以做出许多改变和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1