一种高转速小扭矩星形隔振联轴器的制作方法
[0001]
本发明涉及高转速精密旋转机械用联轴器,具体涉及一种高转速小扭矩星形隔振联轴器。
背景技术:
[0002]
在高转速精密旋转机械试验研究、长时运行过程中,如:航空发动机零部件试验、高速滑环引电器运行等,转静件之间的间隙变化和轴系振动对性能指标和强度寿命的影响巨大,而驱动轴系各支点轴承的固有游隙和轴与轴之间的对中偏差的叠加效应,往往导致每分钟万转级别的高转速运行状态下驱动轴系轴端颤振明显,隔离或降低高速驱动轴系轴端颤振对高转速精密旋转机械的性能和寿命有十分大的现实意义。
[0003]
当前,市场上现有的联轴器种类繁多,主要分为刚性类联轴器和弹性类联轴器。按照功能,对于对中要求严格的机械来说刚性类联轴器并不适用;而弹性类联轴器中的轮胎联轴器和膜片联轴器可以在一定程度上降低轴端颤振,但轮胎联轴器系列或类似结构的弹性材料在高速旋转离心力下会向半径外运动,会产生拉扯从动轴端的拉力,这种拉力在轴心方向的分力会给高转速精密旋转机械施加额外的轴向力,且这一类联轴器现场运行噪声十分大;膜片联轴器虽然不像轮胎联轴器系列在高转速下产生额外轴向力,也不会产生十分明显的噪声,但对于高转速精密旋转机械运行的隔振或降振效果有限,仍不能达到良好效果。
技术实现要素:
[0004]
本发明的目的是为了提供一种结构紧凑、使用可靠的高转速小扭矩星形隔振联轴器,解决现有联轴器应用于高转速精密旋转机械时隔振或降振效果差的问题,有效降低主动轴系轴端颤振对从动轴系的影响,且运行噪声低。
[0005]
本发明的技术方案是:一种高转速小扭矩星形隔振联轴器,包括主动轴端联接体和从动轴端联接体,其技术要点是:所述主动轴端联接体由法兰盘ⅰ、与法兰盘ⅰ连接的鼠笼状轴体组成,所述从动轴端联接体由法兰盘ⅱ、与法兰盘ⅱ连接的星形轴体组成,所述星形轴体插入鼠笼状轴体中,星形轴体与鼠笼状轴体之间至少连接一组具有延展性的拉力线,每组拉力线由沿星形轴体周向对称分布的多根拉力线组成。
[0006]
上述的高转速小扭矩星形隔振联轴器,所述拉力线至少两组,各组拉力线沿星形轴体轴向间隔分布。
[0007]
上述的高转速小扭矩星形隔振联轴器,所述鼠笼状轴体包括多个均匀分布的轴向拉力梁、连接于各轴向拉力梁之间的周向承力梁组成,每个轴向拉力梁上设有与拉力线连接的至少一个拉力孔ⅰ,每个轴向拉力梁上拉力孔ⅰ的数量与拉力线的组数相同且沿轴向拉力梁长度方向间隔分布,所述轴向拉力梁的数量与每组拉力线中拉力线的数量相等。
[0008]
上述的高转速小扭矩星形隔振联轴器,所述星形轴体包括空心轴本体、设于空心
轴本体外周面的多个轴向拉力坎组成,每个轴向拉力坎设有与拉力线连接的至少一个拉力孔ⅱ,每个轴向拉力坎上拉力孔ⅱ的数量与拉力线的组数相同且沿轴向拉力坎长度方向间隔分布,所述轴向拉力坎的数量与每组拉力线中拉力线的数量相等。其中,空心轴本体便于旋转部件测试线的走线,测试信号无线发射器的安装等。
[0009]
上述的高转速小扭矩星形隔振联轴器,所述鼠笼状轴体上连接拉力线的拉力孔ⅰ的轴心线与其所在轴体位置的法线重合。
[0010]
上述的高转速小扭矩星形隔振联轴器,所述星形轴体上连接拉力线的拉力孔ⅱ的轴心线与其所在轴体位置的切线重合。
[0011]
上述的高转速小扭矩星形隔振联轴器,所述拉力线为尼龙线或钢丝绳。
[0012]
上述的高转速小扭矩星形隔振联轴器,所述星形轴体的横截面为六芒星状,其空心轴本体外周均匀分布6个轴向拉力坎。
[0013]
本发明的有益效果是:1、本发明采用具有一定延展性的高强度拉力线组连接在主动轴端联接体的鼠笼状轴体和从动轴端联接体的星形轴体之间,使鼠笼状轴体的扭矩转换为拉力线的拉力,拉动星形轴体径向位置,拉力在星形轴体径向位置的切向分量与星形轴体半径形成旋转力矩,达到驱动星形轴体的目的。本发明在主、从动轴系不对中的情况下有效传扭的同时,通过拉力线有效降低主动轴系颤振对从动轴系的影响,大大降低了运行噪声。
[0014]
2、本发明采用鼠笼状轴体与星形轴体构成的鼠笼状结构,结构紧凑,同时利于观察,安装拆卸方便,在需要提前安装的情况下不影响主动轴系和从动轴系的对中作业,也能在完全不改变主动轴系和从动轴系空间安装姿态下进行完全拆除。
[0015]
3、本发明主体寿命长,拉力线通过鼠笼状结构检修直观,更换方便,大大提高检修效率。
附图说明
[0016]
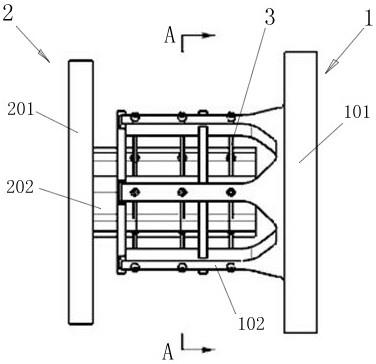
图1是本发明的结构示意图;图2是图1的右视图;图3是图1中a-a向剖面图;图4是本发明从动轴端联接体的结构示意图;图5是图4中b-b向剖面图;图6是图5中c-c向剖面图;图7是图6中d部放大图;图8是本发明主动轴端联接体的结构示意图;图9是图8中e-e向剖面图;图10是图9中f-f向剖面图;图11是图9中g-g向剖面图。
[0017]
图中:1.主动轴端联接体、101.法兰盘ⅰ、102.鼠笼状轴体、103.轴向拉力梁、104.周向承力梁、105.拉力孔ⅰ;2.从动轴端联接体、201.法兰盘ⅱ、202.星形轴体、203.空心轴本体、204.轴向拉力坎、205.拉力孔ⅱ;3.拉力线。
具体实施方式
[0018]
如图1-图3所示,该高转速小扭矩星形隔振联轴器,包括主动轴端联接体1和从动轴端联接体2。其中,所述主动轴端联接体1由法兰盘ⅰ101、与法兰盘ⅰ101连接的鼠笼状轴体102组成,所述从动轴端联接体2由法兰盘ⅱ201、与法兰盘ⅱ201连接的星形轴体202组成,所述星形轴体202插入鼠笼状轴体102中,星形轴体202与鼠笼状轴体102之间至少连接一组具有延展性的拉力线3,每组拉力线3由沿星形轴体202周向对称分布的多根拉力线组成。本实施例中,所述拉力线3为三组,各组拉力线沿星形轴体轴向间隔分布,每组拉力线由6根拉力线组成。所述拉力线3采用具有延展性的高强度拉力线,如尼龙线或钢丝绳等,本实施例中采用尼龙线。
[0019]
参见图8-图11,所述鼠笼状轴体102包括多个均匀分布的轴向拉力梁103、连接于各轴向拉力梁103之间的周向承力梁104组成,每个轴向拉力梁103上设有与拉力线3连接的至少一个拉力孔ⅰ105,每个轴向拉力梁上拉力孔ⅰ105的数量与拉力线3的组数相同且沿轴向拉力梁长度方向间隔分布,所述轴向拉力梁103的数量与每组拉力线3中拉力线的数量相等。本实施例中,鼠笼状轴体102均匀设有6个轴向拉力梁103,每个轴向拉力梁103上设有3个拉力孔ⅰ105,拉力孔ⅰ105的轴心线与其所在轴体位置的法线重合。
[0020]
参见图4-图7,所述星形轴体202包括空心轴本体203、设于空心轴本体203外周面的多个轴向拉力坎204组成,每个轴向拉力坎204设有与拉力线3连接的至少一个拉力孔ⅱ205,每个轴向拉力坎上拉力孔ⅱ205的数量与拉力线3的组数相同且沿轴向拉力坎长度方向间隔分布,所述轴向拉力坎204的数量与每组拉力线3中拉力线的数量相等。其中,空心轴本体203便于旋转部件测试线的走线,测试信号无线发射器的安装等。本实施例中,星形轴体的空心轴本体203外周均匀设有6个轴向拉力坎204,星形轴体的横截面为六芒星状,每个轴向拉力坎204上设有3个拉力孔ⅱ205,拉力孔ⅱ205的轴心线与其所在轴体位置的切线重合。
[0021]
安装时,拉力线3的一端安装到星形轴体的轴向拉力坎上的拉力孔ⅱ205中,拉力线3的另外一端安装到对应的鼠笼状轴体的轴向拉力梁上的拉力孔ⅰ105中,然后将星形轴体202插入鼠笼状轴体102内,在轴系上进行对中操作后,绷直拉力线3然后固定即可。若鼠笼状轴体102与星形轴体202之间存在对中偏差,包含上下、左右和角向三个自由度偏差,由拉力线3的长短配合以及拉力线自身的延展性去消除,即本发明能在轴系不对中情况下有效传扭,拉力线的延展性最大限度的降低了鼠笼状轴体端轴系振动对星形轴体端轴系的影响。
[0022]
以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明创造范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1