用于复合定位仪的脚架的制作方法
[0001]
本实用新型涉及一种测量辅助装置,尤其是一种结构简单、便于操作的用于复合定位仪的脚架。
背景技术:
[0002]
传统用于地面点精密定位的仪器有两类:全站仪和卫星定位仪。全站仪是集测距和测角为一体的定位仪器,属于圆周式的无接触测量。存在的不足是:需要知道全站仪安置点的坐标,而且还需要利用远处已知方位或坐标的固定目标来标定全站仪的零方向,给测量带来极大的不便。卫星定位仪的应用普及改变了传统大地测量及工程测量的定位方式,但存在的不足是:卫星定位仪属于接触式测量,必须将卫星定位仪安置在所测的地面点上才能得到该点的位置,测量员跑点的工作量巨大,并且在树林、隧道和高楼附近等地带,卫星信号受到遮挡,使测量存在盲区。专利号为201210467276.1的中国专利,公开了一种“互联式多功能定位测量仪”,专利号为201811463269.8的中国专利,公开了一种“对偶式双复合定位仪测量方法”,上述专利的特点是将微型的全站仪安置于卫星定位仪的标杆上(俗称为卫星定位杆),实现了全站仪和卫星定位仪的有机融合、优势互补,称为复合定位仪。然而,由于复合定位仪测量时定位杆需垂直立于地面测点上,全站仪需处于水平状态,同时需要测量员围绕定位杆瞄准周围目标进行观测,故现有脚架并不适合复合定位仪,主要原因如下:(1)若采用三腿脚架,则脚架的三条腿与定位杆构成四点地面安置,不能快速精确调平;(2)套管式的伸缩支腿需要测量员用眼睛观察定位杆上的水准器气泡,同时两手分别控制内外管相对移动进行长度调节,当水准器气泡居中时,锁紧置于外管上的螺纹顶丝,依靠螺纹顶丝与内管之间的摩擦力实现内外管相对固定。不仅操作费时费力,而且极易因顶丝松动而出现内外套管相对滑动,进而导致定位杆偏移垂直状态甚至倾倒的现象;并且收放不便,不利于复合定位仪的携带和快速搬站,极大地影响了复合定位仪工作效率,缺乏实用性;(3)若采用二腿脚架,因不能通过测量员脚踩支腿底部来增加稳定性,故由于重心问题而存在着无法直立或极易倾倒的现象。
技术实现要素:
[0003]
本实用新型是为了解决现有技术所存在的上述技术问题,提供一种结构简单、便于操作用于复合定位仪的脚架。
[0004]
本实用新型的技术解决方案是:一种用于复合定位仪的脚架,设有定位杆夹套和两根可伸缩的支腿,所述定位杆夹套与横向伸缩杆的一端相接,所述横向伸缩杆设有可相对滑动的内管、第二套管及制动装置,横向伸缩杆的另一端固定连接有定位杆调直装置,所述定位杆调直装置设有基座,与基座转动相接有轴向相互垂直的两个横向调节螺丝,所述两个横向调节螺丝的夹角平分线与横向伸缩杆的轴线重合,与横向调节螺丝螺纹相接有滑动块,滑动块通过连接件与支腿转动相接。
[0005]
所述可伸缩的支腿由板条及套在板条外且可相对板条移动的第一套管构成,在板
条上竖向排列有多个第一孔,所述第一套管上端侧面设有第二凹槽,在第二凹槽内有可横向移动的第一按压块,所述第二凹槽底部与第一按压块之间固定有横向张力弹簧,在按压块上设有第一板条通孔,在第一板条通孔位于横向张力弹簧的一侧设有与第一孔匹配的卡柱。
[0006]
所述内管为竖向排列有多个第二孔的板条,所述制动装置设有位于第二套管侧面的凹槽,在凹槽内有可移动的第二按压块,所述凹槽底部与第二按压块之间固定有张力弹簧,在第二按压块上设有第二板条通孔,在第二板条通孔位于张力弹簧的一侧设有与第二孔匹配的第二卡柱。
[0007]
所述横向调节螺丝由前向后依次设有卡环、圆柱、螺杆和转动手柄,所述圆柱直径小于卡环及螺杆的直径,所述基座上设有与调节螺丝相对应且由圆孔,所述圆孔的孔径及长度与圆柱匹配且直径小于螺杆的直径,圆柱置于圆孔内。
[0008]
本实用新型的横向伸缩杆及两个支腿与固定于定位杆夹套内的卫星定位仪标杆形成稳定的结构,具有优越的防风能力,既保证了复合定位仪的快速精确调平,又便于测量员携带和快速搬站。特别是支腿及横向伸缩杆均采用了带孔的板条插入外套管的结构,由按压块、卡柱及弹簧构成稳定的自锁装置,既方便支腿、横向伸缩杆的伸缩调节又确保锁紧后的稳定可靠,提高了复合定位仪的工作效率及精确度。
附图说明
[0009]
图1、2、3、4是本实用新型实施例1的结构示意图。
[0010]
图5、6、7、8是本实用新型实施例2的结构示意图。
[0011]
图9、10、11、12是本实用新型实施例3的结构示意图。
[0012]
图13是本实用新型实施例4的结构示意图。
[0013]
图14、15是本实用新型实施例5的结构示意图。
具体实施方式
[0014]
实施例1:
[0015]
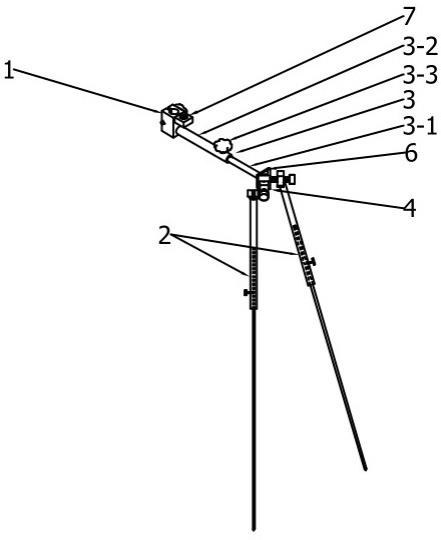
如图1、2、3、4所示:设有定位杆夹套1和两根可伸缩的支腿2,定位杆夹套1与横向伸缩杆3的一端相接,横向伸缩杆3设有可相对滑动的内管3-1、第二套管3-2及制动装置3-3,横向伸缩杆3的另一端固定连接有定位杆调直装置4。定位杆夹套1与横向伸缩杆3的内管3-1或第二套管3-2相接均可,制动装置3-3的作用是阻止内管3-1与第二套管3-2相对滑动,可为置于第二套管3-2与内管3-1之间的螺纹顶丝。定位杆调直装置4设有基座4-1,与基座4-1转动相接有轴向相互垂直且处于同一平面的两个横向调节螺丝4-2,即横向调节螺丝4-2可相对基座4-1转动但不可前后移动。两个横向调节螺丝4-2的夹角平分线与横向伸缩杆3的轴线重合,与横向调节螺丝4-2螺纹相接有滑动块4-3,滑动块4-3通过连接件5与支腿2转动相接,即两个支腿2可实现角度调节并自锁。
[0016]
实施例1的工作过程:将卫星定位杆安置于定位杆夹套1内,调节横向伸缩杆3的至合适的长度(长度越长脚架越稳定,当风力较大时,应使横向伸缩杆至最大长度)后,通过制动装置3-3制动,然后伸缩两个支腿2使卫星定位杆大致处于垂直状态,在保证两个支腿2位置不变的前提下调节两个横向调节螺丝4-2,使卫星定位杆上的水准器的气泡精确居中,此
时,卫星定位杆处于精确垂直状态,同时卫星定位杆上的全站仪处于水平状态。
[0017]
实施例2:
[0018]
基本结构实施例1,与实施例1所不同的如图5、6、7、8所示。可伸缩的支腿2由板条2-1及套在板条2-1外且可相对板条2-1移动的第一套管2-2构成,在板条2-1上竖向排列有多个间距紧密的第一孔2-3,第一孔2-3的间距及直径大小应满足长度调节精度的需要。第一套管2-2上端侧面设有第二凹槽2-4,在第二凹槽2-4内有可横向移动的第一按压块2-5,第一按压块2-5与第二凹槽2-4之间可采用滑轨等连接方式。第二凹槽2-4底部与第一按压块2-5之间固定有横向张力弹簧2-6,在第一按压块2-5上设有第一板条通孔2-7,在第一板条通孔2-7位于横向张力弹簧2-6的一侧设有与第一孔2-3匹配的第一卡柱2-8。
[0019]
实施例2操作过程:与实施例1过程相同,只是观察水准器调节伸缩支腿2使测量定位杆处于垂直稳定状态时,测量员手压按压块第一2-5使其向凹槽2-4内移动,此时,卡柱2-8与板条2-1的第一孔2-3分离,可方便调节板条2-1在第一套管2-2内上下移动。当水准器的气泡居中时,测量员松开第一按压块2-5,卡柱2-8的在横向张力弹簧2-6的作用下嵌入板条2-1的第一孔2-3内将板条2-1与第一套管2-2相对固定。
[0020]
实施例3:
[0021]
基本结构同是实施例1或实施例2,区别如图9、10、11、12所示,内管3-1为竖向排列有多个第二孔3-1-1的板条,制动装置3-3设有位于第二套管3-2侧面的凹槽3-3-1,在凹槽3-3-1内有可通过滑轨限制移动的第二按压块3-3-2,凹槽3-3-1底部与第二按压块3-3-2之间固定有张力弹簧3-3-3,在第二按压块3-3-2上设有第二板条通孔3-3-4,在第二板条通孔3-3-4位于张力弹簧3-3-3的一侧设有与第二孔3-1-1匹配的第二卡柱3-3-5。
[0022]
实施例3操作过程:需要调节横向伸缩杆3的长度时,手压按压块3-3-2使其向凹槽3-3-1内移动,此时,第二卡柱3-3-5与板条的第二孔3-1-1分离,方便调节板条3-1在第二套管3-2内相对移动。当长度合适后,松开按压块3-3-2,卡柱3-3-5的在张力弹簧3-3-3的作用下嵌入板条3-1的第二孔3-1-1内将板条3-1与第二套管3-2相对固定。操作简单、稳定性好。
[0023]
实施例4:
[0024]
基本结构如实施例3,区别如图13所示:横向调节螺丝4-2由前向后依次设有卡环4-2-1、圆柱4-2-2、螺杆4-2-3和转动手柄4-2-4,圆柱4-2-2直径小于卡环4-2-1及螺杆4-2-3的直径,卡环4-2-1与圆柱4-2-2螺纹连接。基座4-1上设有与调节螺丝4-2相对应的圆孔4-1-1,孔径及长度与圆柱4-2-2匹配且直径小于螺杆4-2-3的直径,圆柱4-2-2置于圆孔4-1-1内。亦可以在基座4-1上设置与调节螺丝4-2相对应的沉孔,沉孔内一个孔为圆孔4-1-1,另一个孔为卡环嵌入孔4-1-2,卡环嵌入孔4-1-2的孔径及长度与卡环4-2-1匹配,卡环4-2-1及圆柱4-2-2分别对应置于卡环嵌入孔4-1-2和圆孔4-1-1内,可保证横向调节螺丝4-2可相对基座4-1转动但不可前后移动。
[0025]
实施例5:
[0026]
如图14、15所示:基本结构同是实施例4,不同的是:所述基座4-1为具有两个外侧面呈直角的u型固定环,两个呈直角的外侧面所构成角的平分线与的横向伸缩杆3轴线一致,u型固定环的两个外侧面分别设有圆孔4-1-1。为了省力便于快速搬站,可以在安装上的定位杆底部连接移动脚轮6。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1