斜拉桥攀爬机器人用弹簧磁流变耦合加载机构及减振方法
1.本发明涉及斜拉桥缆索检测技术领域,特别是一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构及减振方法。
背景技术:
2.随着我国交通建设的飞速发展,大跨度斜拉桥和悬索桥越来越多的出现在大江大河上。拉索作为桥梁的主要构件经风吹日晒,表面pe层出现不同程度的硬化和龟裂现象,内部钢丝束受到腐蚀,严重者甚至出现断丝、桥梁坍塌事故;另一方面,由于风振、雨振等原因,加大钢丝束磨损,严重者也会发生断丝现象。
3.然而,斜拉桥运维的关键—拉索无损检测技术,目前仍以人工检测为主,主要使用卷扬机经定滑轮拖动吊篮方式,或使用升降车搭载工人对拉索进行检测和维护。该方法不但效率低,成本高,检测人员安全难以保证,而且仅适用于小型斜拉桥,无法胜任大跨度、高振幅、强扰动、超长拉索检测工作。因此,应用安全、稳定、高效的机器人系统,解决桥梁拉索自动检测的行业需求,成为必然要求。现代大跨度斜拉桥通常建设在大型江河湖海之上,超长柔性拉索易受风载荷等扰动影响而产生不同形式的振动。在爬升过程中,攀爬机器人与拉索一起振动,因而存在着如下方面的不足,有待进行改进:
4.1、由于攀爬机器人与拉索之间主要靠滚动摩擦,实现爬升;攀爬机器人在随拉索振动的同时,攀爬机器人与拉索之间的滚动摩擦将发生变化,故而会出现打滑或卡死等现象,降低了爬升稳定性。
5.2、由于攀爬机器人上携带有精度较高的缆索检测设备,当攀爬机器人在随拉索振动的同时,若振动幅度大,会严重影响缆索检测设备的自身检测精度;尤其是当两者发生共振时,甚至会损坏缆索检测设备。
技术实现要素:
6.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构及减振方法,该斜拉桥攀爬机器人用弹簧磁流变耦合加载机构及减振方法能适用于各类斜拉索攀爬机器人的减振控制,提高机器人的攀爬稳定性。
7.为解决上述技术问题,本发明采用的技术方案是:
8.一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构,包括磁流变阻尼器和螺旋弹簧阻尼组件。
9.斜拉桥攀爬机器人包括活动连接的上机架和下机架。
10.磁流变阻尼器包括阻尼缸、活塞、活塞杆和励磁线圈;励磁线圈绕设在活塞中,活塞间隙滑动式设置在阻尼缸中,并将阻尼缸的流体腔分为左腔体和右腔体;活塞杆的一端连接活塞,另一端从左腔体中伸出,并与上机架或下机架相铰接;右腔体通过吊耳与下机架或上机架相铰接。
11.螺旋弹簧阻尼组件包括套筒、外螺旋弹簧、浮动活塞和内螺旋弹簧。
12.套筒同轴罩设在阻尼缸的左腔体外周,且与活塞杆滑动连接。
13.外螺旋弹簧同轴套设在阻尼缸外周,右端位置固定,左端与套筒相连接或弹性接触配合。
14.浮动活塞滑动安装在阻尼缸的右腔体中。
15.内螺旋弹簧安装在浮动活塞右侧的阻尼缸右腔体中。
16.活塞的外圆周面上设置有环形凹槽,励磁线圈绕设在环形凹槽中。
17.活塞和活塞杆中均设置有引线孔,励磁线圈的引线从引线孔中穿出。
18.阻尼缸包括缸筒、以及密封安装在缸筒左右两侧的左端盖和右端盖;右端盖外径大于缸筒外径;外螺旋弹簧套设在套筒与右端盖之间的缸筒外周。
19.套筒的右侧外缘以及右端盖的左侧外缘均设置有弹簧挡。
20.右端盖的右侧中心设置有连接轴,连接轴的右侧与吊耳螺纹连接。
21.一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构的减振方法,当缆索发生振动时,安装在斜拉桥攀爬机器人中的弹簧磁流变耦合加载机构,通过模糊pid算法,调节自身的总阻尼值f进行耗能,使得弹簧磁流变耦合加载机构或斜拉桥攀爬机器人的实时振动加速度c(t)达到设定的目标振动加速度r(t)。
22.总阻尼值f的计算公式为:
[0023][0024]
τ
y
=τ
y
(v,i)=a1e
‑
i
+a2ln(i+e)+a3i
[0025]
式中,η为磁流变液的粘度;l为阻尼缸中活塞的长度;b为阻尼缸与活塞之间环形间隙的周长;h为阻尼缸与活塞之间环形间隙的高度;a
p
为活塞的有效横截面积;τ
y
为磁流变液的屈服应力;v为弹簧磁流变耦合加载机构的振动速度;i为励磁线圈中的激励电流;x为活塞运动位移,k为外螺旋弹簧的弹性系数;a1、a2和a3为方程仿真拟合系数。
[0026]
总阻尼值f的调节方法具体为:当缆索发生振动时,活塞杆在励磁线圈产生的励磁磁场以及外螺旋弹簧的共同作用下,进行拉伸或压缩,产生总阻尼值f;总阻尼值f在使斜拉桥攀爬机器人夹紧拉索的同时,并对振动进行耗能;与此同时,浮动活塞和内螺旋弹簧则能补偿活塞杆拉伸或压缩时产生的体积差。
[0027]
通过向缆索或斜拉桥攀爬机器人,施加外部的正弦激励信号,进而仿真模拟缆索的所受的外部振动荷载,同时,正弦激励信号的幅值和频率能够调节。
[0028]
本发明具有如下有益效果:
[0029]
(1)本发明设计了一种弹簧
‑
磁流变耦合加载机构,并将其应用于攀爬机器人
‑
斜拉索耦合振动系统,所发明的耦合加载机构既能使机器人夹紧拉索,又能对拉索
‑
检测机器人发生的振动能起到双重减振的效果。
[0030]
(2)本发明揭示了螺旋弹簧与磁流变阻尼耦合机构变阻尼形成与振动抑制机理。结合磁流变机构可变阻尼的优势,设计刚柔可控的拉索攀爬机器人的加载机构,建立螺旋弹簧与磁流变阻尼耦合的加载机构动力学模型,分析变阻尼对机器人振动的抑制机理,确保拉索振动时机器人仍可稳定爬升。
[0031]
(3)本发明提出基于模糊pid控制算法的拉索攀爬机器人自适应控制方法。通过对
风载、振动和车辆等不确定扰动进行分析,提出基于模糊pid的机器人自适应控制方法,很好地解决了磁流变阻尼器系统非线性、回滞性和饱和性问题,能对耦合加载机构中的迟滞、时滞进行实时补偿;进而预测机器人
‑
斜拉索的振动状态,对多个加载机构进行协调控制,保证大振幅/高柔性拉索振动条件下机器人
‑
斜拉索系统的稳定性和刚柔可控性,是发明的又一特色与创新。
附图说明
[0032]
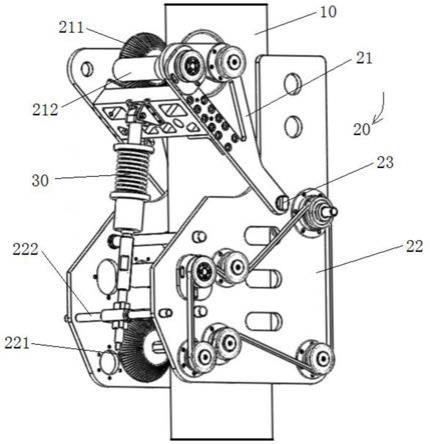
图1显示了本发明的弹簧磁流变耦合加载机构在斜拉桥攀爬机器人中的应用实例图。
[0033]
图2显示了本发明一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构的结构示意图。
[0034]
图3显示了磁流变液在平板中的流动示意图。
[0035]
图4显示了磁流变液在平板中的流速分布图。
[0036]
图5显示了本发明中模糊pid算法的原理图。
[0037]
图6显示了本发明中的simulink仿真模型图。
[0038]
图7显示了a=10mm,f=1hz时,不同电流下的特性曲线;其中,图7(a)显示不同电流下的f
‑
x曲线;图7(b)显示不同电流下f
‑
v曲线;图7(c)显示不同电流下f
‑
t曲线。
[0039]
图8显示了f=1hz,i=0.2a时不同幅值下的特性曲线;其中,图8(a)显示不同幅值下f
‑
x曲线;图8(b)显示不同幅值下f
‑
v曲线;图8(c)显示不同幅值下f
‑
t曲线。
[0040]
图9显示了a=10mm,i=0.2a时不同频率下的特性曲线;其中,图9(a)显示不同频率下f
‑
x曲线;图9(b)显示不同频率下f
‑
v曲线;图9(c)显示不同频率下f
‑
t曲线。
[0041]
图10显示了模糊pid控制器的simulink仿真模型。
[0042]
图11显示了基于磁流变阻尼器模糊pid减振控制系统的simulink仿真模型。
[0043]
图12显示了幅值为10mm,频率1hz时弹簧磁流变耦合加载机构的加速度响应曲线。
[0044]
图13显示了幅值为10mm,频率10hz时弹簧磁流变耦合加载机构的加速度响应曲线。
[0045]
图14显示了幅值为10mm,频率50hz时弹簧磁流变耦合加载机构的加速度响应曲线。
[0046]
其中有:
[0047]
10.拉索;
[0048]
20.斜拉桥攀爬机器人;
[0049]
21.上机架;211.上滚轮;212.上横杆;
[0050]
22.下机架;221.下滚轮;222.下横杆;
[0051]
23.活动关节;
[0052]
30.弹簧磁流变耦合加载机构;
[0053]
311.缸筒;312.左端盖;313.右端盖;314.连接轴;315.吊耳;316.弹簧档;317.螺钉;
[0054]
32.活塞杆;
[0055]
33.活塞;
[0056]
34.励磁线圈;341.引线;
[0057]
35.紧固螺母;
[0058]
41.套筒;42.外螺旋弹簧;43.浮动活塞;44.内螺旋弹簧;45.密封圈。
具体实施方式
[0059]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0060]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0061]
一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构,也称弹簧磁流变耦合加载机构30,主要应用在斜拉桥攀爬机器人20中,但也同样适用于其它需要减振的运动机构。
[0062]
斜拉桥攀爬机器人20,如图1所示,包括上机架21、下机架22、活动关节23和若干个滚轮。本技术中,优选为三个滚轮,分别为一个上滚轮211和两个下滚轮221。
[0063]
上机架21和下机架22优选通过活动关节23转动连接,上机架安装上滚轮以及上横杆212。下机架安装下滚轮以及下横杆222。
[0064]
斜拉桥攀爬机器人为现有技术,具体详细结构,可参考申请人之前的专利文献,如申请号为201510726413.2,发明名称为“一种闭式高空缆索爬升机器人”的专利申请;以及申请号为201510728718.7,发明名称为“一种基于弹性框架的高空缆索爬升机构及机器人”的专利申请。
[0065]
如图2所示,一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构,包括磁流变阻尼器和螺旋弹簧阻尼组件。
[0066]
磁流变阻尼器包括阻尼缸、活塞33、活塞杆32和励磁线圈34。
[0067]
阻尼缸优选包括缸筒311、以及密封安装在缸筒左右两侧的左端盖312和右端盖313。
[0068]
右端盖外径优选大于缸筒外径,右端盖的左侧外缘优选设置有弹簧挡316。
[0069]
右端盖的右侧中心优选设置有连接轴314,连接轴的右侧优选与吊耳315螺纹连接,从而使得右端盖与吊耳之间的距离能够调节。吊耳的右侧与下机架或上机架相铰接,进一步优选与下横杆或上横杆相铰接。
[0070]
进一步,左端盖和右端盖均优选通过螺钉317与缸筒相连接,左端盖与缸筒之间还优选设置有密封圈45。
[0071]
活塞的外圆周面上设置有环形凹槽,励磁线圈绕设在环形凹槽中。
[0072]
活塞间隙滑动式设置在阻尼缸中,并将阻尼缸的流体腔分为左腔体和右腔体。
[0073]
活塞杆的一端优选通过外螺纹连接活塞,活塞的左侧优选通过活塞杆上的轴肩进行轴向限位,活塞的右侧优选安装在活塞杆上的紧固螺母35进行轴向限位。
[0074]
活塞杆的另一端从左腔体及左端盖中伸出,并与上机架或下机架相铰接,进一步优选与上横杆或下横杆相铰接。活塞杆与左端盖之间优选通过密封圈进行密封。
[0075]
进一步,活塞和活塞杆中均设置有引线孔,励磁线圈的引线341从引线孔中穿出。
[0076]
螺旋弹簧阻尼组件包括套筒41、外螺旋弹簧42、浮动活塞43和内螺旋弹簧44。
[0077]
套筒同轴罩设在阻尼缸的左腔体外周,且与活塞杆滑动连接。
[0078]
套筒的右侧外缘优选设置有弹簧挡。
[0079]
外螺旋弹簧同轴套设在阻尼缸外周,右端位置固定,左端与套筒相连接或弹性接触配合。优选,外螺旋弹簧套设在套筒与右端盖之间的缸筒外周,同时,通过套筒上的弹簧挡以及右端盖上的弹簧挡进行径向限位。
[0080]
浮动活塞滑动安装在阻尼缸的右腔体中,并优选通过密封圈进行密封。
[0081]
内螺旋弹簧安装在浮动活塞右侧的阻尼缸右腔体中。
[0082]
上述左腔体、活塞与浮动活塞之间的右腔体均填充有磁流变液,浮动活塞与右端盖之间的右腔体则没有磁流变液。
[0083]
励磁线圈通入可变电流,当拉索
‑
检测机器人系统发生振动时,在磁流变阻尼器内部:活塞能在一定范围内来回运动,浮动活塞随着活塞头往复运动,内螺旋弹簧使得活塞头保持在一个固定的工作区域。于是,磁流变阻尼器始终可以产生平稳可调的阻尼力;在磁流变阻尼器外部:外螺旋弹簧套在缸筒上,套筒与阻尼器缸筒发生相对滑动,使得阻尼器外部也输出连续稳定的阻尼力。所以,该弹簧磁流变耦合加载机构不仅能使机器人夹紧斜拉索,还能对拉索
‑
检测机器人系统在随机干扰下产生的振动能起到双重减振的效果。
[0084]
一种斜拉桥攀爬机器人用弹簧磁流变耦合加载机构的减振方法,当缆索发生振动时,安装在斜拉桥攀爬机器人中的弹簧磁流变耦合加载机构,通过模糊pid算法,调节自身的总阻尼值f进行耗能,使得弹簧磁流变耦合加载机构或斜拉桥攀爬机器人的实时振动加速度c(t)达到设定的目标振动加速度r(t)。
[0085]
一、螺旋弹簧与磁流变阻尼耦合加载机构动力学特性分析与振动抑制机理
[0086]
(1)磁流变阻尼器动力特性分析
[0087]
bingham模型能有效地描述外界随机扰动下输入与阻尼力之间的关系,采用bingham粘塑性模型建立流动剪切混合工作模式下磁流变阻尼器力学模型,具体如下:
[0088]
建立流动模式和剪切模式下的磁流变阻尼器(mrd)阻尼力模型
[0089]
将磁流变液工作过程简化为在两个相互运动的平板间流动模型,流动情况和速度分布见图3和图4。图4根据流动状态把磁流变液分为屈服流动区i(0≤y≤y1),刚性流动区ⅱ(y1<y≤y2)和屈服流动区ⅲ(y2<y≤h);δp表示沿磁流变液流动流动方向的压强。
[0090]
设两平板之间的间隙为h(类似于本技术中阻尼缸与活塞之间环形间隙的高度),长度为l(类似于本技术中阻尼缸中活塞的长度),宽度为b(类似于本技术中阻尼缸与活塞之间环形间隙的周长),流动速度为u,流速方向为x方向,在y上无位移。
[0091]
根据bingham模型可推导出流动模式下的mrd阻尼力:
[0092][0093]
同理,可得到剪切模式下的输出阻尼力为:
[0094][0095]
a
p
为活塞的有效横截面积,τ
y
和η分别是磁流变液的屈服应力和粘度。
[0096]
a、建立混合模式下的mrd阻尼力模型
[0097]
混合工作模式下磁流变阻尼器是流动模式、剪切模式下的阻尼力的叠加,即f=f1+f2,可得:
[0098][0099]
式中,第一项为粘滞阻尼力,第二项为库仑阻尼力,该项由磁场强度决定,反映了磁流变阻尼器的可控特性。
[0100]
b、建立励磁电流、机器人振动加速度和阻尼力的数学模型
[0101]
应用有限元方法对磁流变阻尼器中的磁场进行分析,建立励磁电流i与磁场强度h的关系i
‑
h,磁场强度h与磁感应强度b的关系h
‑
b,以及磁场强度h和屈服强度τ
y
的关系h
‑
τ
y
,通过拟合得到励磁电流i,振动速度v与屈服强度τ
y
之间的近似关系:
[0102]
τ
y
=τ
y
(v,i)=a1e
‑
i
+a2ln(i+e)+a3i。
[0103]
上述a1、a2和a3为方程仿真拟合系数,为常数。
[0104]
(2)耦合加载机构动力特性分析与振动抑制机理
[0105]
当拉索振动时,外螺旋弹簧与磁流变阻尼器耦合机构对随机干扰下机器人
‑
斜拉索系统的振动起到双重减振的效果。其中,外螺旋弹簧在为机器人攀爬提供稳定的夹紧力的同时,在一定范围内还能调节机器人
‑
斜拉索系统的振动;通过调节输入电流实现磁流变阻尼器变阻尼,能有效降低机器人
‑
斜拉索系统的振动峰值。
[0106]
上述总阻尼值f的计算公式为:
[0107][0108]
τ
y
=τ
y
(v,i)=a1e
‑
i
+a2ln(i+e)+a3i
[0109]
式中,v为弹簧磁流变耦合加载机构的振动速度;i为励磁线圈中的激励电流;x为活塞运动位移,k为外螺旋弹簧的弹性系数。
[0110]
(3)耦合加载机构的matlab/simulink建模和仿真
[0111]
采用lord公司mrf
‑
132ld型号的磁流变液,通过向缆索或斜拉桥攀爬机器人,施加外部的正弦激励信号,进而模拟缆索的所受的外部振动荷载,同时,正弦激励信号的幅值和频率能够调节。
[0112]
将所有设计参数代入弹簧
‑
磁流变阻尼耦合机构加载力公式,可得:
[0113][0114]
通过matlab/simulink建模得到耦合加载机构的仿真模型(图6)。
[0115]
上述仿真模型加载的外部的正弦激励信号x=asin(2πft)时,分别取幅值a={5mm,10mm,15mm},频率f=1hz~50hz并输入i=0~2a的电流值,得到磁流变阻尼器的阻尼力随时间、位移、速度变化的关系曲线,如图7
‑
9所示。
[0116]
由图7
‑
9可知,所建立的力模型能够很好地反应磁流变阻尼器的基本特性。其中,f
‑
s曲线饱满,说明浮动活塞式体积补偿装置可有效补偿活塞杆拉伸和压缩时产生的体积差;阻尼力随加载电流的增大而增大,曲线所包围的面积也随之增大,表明mrd的耗功能力在不断增加。
[0117]
f
‑
v曲线中,当加载电流相同时,阻尼力随速度的增大呈线性增加趋势,这部分阻尼力主要由黏滞阻尼力产生;当速度一定时,阻尼力随加载电流的增大而增大,这部分由可调阻尼力提供,与bingham模型变化特性相符;呈现较好的滞环特性,且随着频率的增大而更加明显。
[0118]
f
‑
t曲线中,当加载电流相同时,阻尼力主要与正弦激励信号的幅值和频率有关。受幅值的影响较小,受频率的影响很大;幅值相同时,频率越高,阻尼力越大,这是因为正弦激励信号频率越高,其速度越大,不可调粘滞阻尼力起主要作用。
[0119]
总体来说,阻尼力受控制电流和振动频率影响较大,受振幅影响较小。在一定范围内,f
‑
x、f
‑
v和f
‑
t曲线倾斜,表明外螺旋弹簧也产生了一定的阻尼力。
[0120]
二、螺旋弹簧与磁流变阻尼耦合加载机构控制方法分析
[0121]
磁流变阻尼器具有非线性、回滞性和饱和特性,而又是一个复杂的多自由度振动的系统,难以用精确的数学模型描述,如采用常规的依据模型的线性控制方法,难以达到良好的控制效果。目前,针对非线性控制系统的控制策略主要有最优控制、模糊控制、滑模控制、神经网络控制等。与其它控制算法相比,将模糊控制和pid控制相结合的模糊pid控制具有建模简单、控制精度高、非线性适应性强、动态性能好等优点。本发明优选使用模糊pid算法对弹簧与磁流变阻尼器耦合加载机构进行控制。
[0122]
(1)模糊pid控制器设计
[0123]
如图5所示,通过加速度传感器,确定磁流变阻尼器轴向振动时加速度的偏差e以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出pid控制参数。
[0124]
模糊控制器主要设计过程有:变量模糊化、求隶属度函数、建立模糊控制规则表和解模糊,然后把模糊控制器的δk
p
、δk
i
、δk
d
参数分别加上系数k
p
、k
i
、k
d
以后与pid控制器完成连接,这样就构成了需要的模糊pid控制器。模糊pid控制器的simulink仿真模型如图10所示。
[0125]
(2)模糊pid仿真分析研究
[0126]
当缆索发生振动时,活塞杆在励磁线圈产生的励磁磁场以及外螺旋弹簧的共同作用下,进行拉伸或压缩,产生总阻尼值f;总阻尼值f在使斜拉桥攀爬机器人夹紧拉索的同时,并对振动进行耗能;与此同时,浮动活塞和内螺旋弹簧则能补偿活塞杆拉伸或压缩时产生的体积差。
[0127]
通过调节励磁电流,进而调节总阻尼值f。
[0128]
在matlab/simulink的仿真环境中建立以阻尼器振动加速度为控制对象,磁流变阻尼器的输入励磁电流为模糊pid控制器输出的单自由度,主被动复合模糊pid控制系统的simulink仿真框图,如图11所示。
[0129]
本技术在仿真模拟时,采用
[0130]
励磁电流的输入幅值及频率,优选设置方式为:输入幅值均为10mm,频率分别为1hz,10hz,50hz的正弦激励信号,经过反复调试,选取k
p
=11,k
i
=7和k
d
=0.3,得到振动加速度曲线,如图12
‑
14所示。
[0131]
从图12
‑
14中的响应曲线能够得出:振动主被动复合控制系统采用模糊pid控制策略得到振动加速度值比被动振动控制系统得到的振动加速度值降低了很多,减振效果非常
好。随着外部信号激励频率的增加,拉索
‑
检测机器人的系统的振动加速度也有所增加,但是减振效果依然很好。
[0132]
总阻尼值f的调节方法具体为:
[0133]
;总阻尼值f、励磁电流和励磁频率之间的关系表示如下:
[0134]
a、当振动速度v保持不变时,总阻尼值f随加载的励磁电流的增大而增大,振动耗能值也将不断增加。
[0135]
b、当加载的励磁电流保持不变时,总阻尼值f随振动速度v的增大而增加。
[0136]
c、当加载的励磁电流保持不变且励磁信号中的幅值相同时,励磁信号中的频率越高,总阻尼值f越大。
[0137]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1