厚度测量装置的制作方法
1.本发明涉及一种厚度测量装置,特别涉及一种可放大感应件移动量以提升测量精确度的厚度测量装置。
背景技术:
2.在护贝机进行热压动作时,需首先确认护贝膜的厚度才可决定热压的参数。目前用以测量护贝膜厚度的厚度计结构中,是将一定栅与检测杆直接连动。当检测杆与待测物接触而发生位移时,通过检测定栅相对于容栅传感器的移动距离,即可直接得知待测物的厚度。于此种结构设计中,测量的准确度直接取决于组件的精密度与传感器的解析度。当测量精准度的要求愈高,组件精密度与传感器解析度的要求亦会大幅提升,将会造成厚度计的成本增加。
3.因此,实有必要发展一种可解决上述问题的厚度测量装置,以解决现有技术所面临的问题。
技术实现要素:
4.本发明的主要目的在于提供一种厚度测量装置,以解决并改善前述现有技术的问题与缺点。
5.本发明的另一目的在于提供一种厚度测量装置,藉由连动组件连接于第一移动组件及第二移动组件之间,且通过第一移动组件及第二移动组件与连动组件的旋转轴心的距离差异,使第二移动组件具有较大的位移量,达到放大检测信号并提升测量精准度的功效。此外,更通过转动件的结构设计,达到降低制造成本的功效。
6.为达前述目的,本发明提供一种厚度测量装置,包含基板、第一移动组件、第二移动组件、框架及连动组件。基板包含基板主体及传感器。传感器设置于基板主体的一表面。第一移动组件可在第一方向上位移,且包含接触端,用以与待测物接触。第二移动组件可在第二方向上位移,且包含感应件,与传感器相对应设置。框架与基板相组接,且包含框架主体、第一导槽以及第二导槽。第一导槽及第二导槽均形成于框架主体。第一移动组件至少部分被容置于第一导槽并可在第一导槽中移动。第二移动组件至少部分被容置于第二导槽并可在第二导槽中移动。连动组件包含转动件、第一连接部及第二连接部。第一连接部设置于转动件的一表面并与第一移动组件相连接。第二连接部设置于转动件的该表面并与第二移动组件相连接。
附图说明
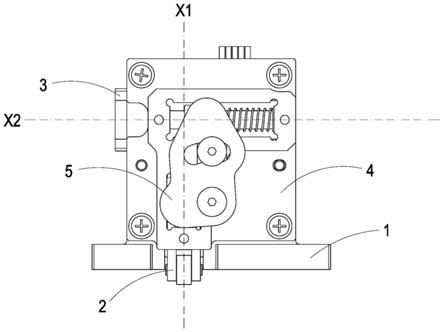
7.图1是揭示本发明第一实施例的厚度测量装置的结构前视图。
8.图2是揭示图1所示的厚度测量装置的立体结构示意图。
9.图3是揭示图1所示的厚度测量装置于一视角的结构爆炸图。
10.图4是揭示图1所示的厚度测量装置于另一视角的结构爆炸图。
11.图5是揭示图1所示的厚度测量装置的第一移动组件、连动组件及第二移动组件的连动关系示意图。
12.图6是揭示本发明第二实施例的厚度测量装置的结构前视图。
13.图7是揭示图6所示的厚度测量装置的立体结构示意图。
14.图8是揭示图6所示的厚度测量装置于一视角的结构爆炸图。
15.附图标记说明如下:
16.1:基板
17.11:基板主体
18.12:传感器
19.13:固定座
20.131:开口
21.2:第一移动组件
22.21:第一块体
23.211:第一凹槽
24.22:第一滑块
25.23:接触端
26.24:第一导杆
27.241:第一凸部
28.3:第二移动组件
29.31:第二块体
30.311:第二凹槽
31.32:第二滑块
32.33:感应件
33.34:第二导杆
34.341:第二凸部
35.35:弹性元件
36.4、4a:框架
37.41:框架主体
38.42、42a:延伸部
39.43、43a:第一通孔
40.44、44a:第二通孔
41.45:第一导槽
42.46:第二导槽
43.47:第一轴承
44.48:第二轴承
45.5、5a:连动组件
46.51、51a:转动件
47.511、511':第一连接部
48.512、512':第二连接部
49.513:第一穿孔
50.514:第二穿孔
51.52:第一固定件
52.53:第二固定件
53.aa:第一半径
54.ab:第二半径
55.ba:第一移动距离
56.bb:第二移动距离
57.ca:第一位移量
58.cb:第二位移量
59.da:第一角度
60.db:第二角度
61.ea:第三角度
62.eb:第四角度
63.fa:第五角度
64.fb:第六角度
65.ga:第七角度
66.gb:第八角度
67.hb:第九角度
68.k:夹角
69.x1:第一方向
70.x2:第二方向
71.θ:旋转角度
具体实施方式
72.体现本发明特征与优点的一些典型实施例将在后段的说明中详细叙述。应理解的是本发明能够在不同的方式上具有各种的变化,其均不脱离本发明的范围,且其中的说明及图式在本质上系当作说明之用,而非用于限制本发明。
73.请参阅图1、图2、图3及图4。图1是揭示本发明第一实施例的厚度测量装置的结构前视图。图2是揭示图1所示的厚度测量装置的立体结构示意图。图3是揭示图1所示的厚度测量装置于一视角的结构爆炸图。图4是揭示图1所示的厚度测量装置于另一视角的结构爆炸图。如图所示,厚度测量装置包含基板1、第一移动组件2、第二移动组件3、框架4及连动组件5。基板1包含基板主体11及传感器12。传感器12设置于基板主体11的一表面。第一移动组件2可在第一方向x1上位移,且包含接触端23,用以与待测物接触,亦即与护贝膜接触。于本实施例中,接触端23可例如但不限为滚轮。第二移动组件3可在第二方向x2上位移,且包含感应件33,与传感器12相对应设置。于本实施例中,传感器12为一容栅传感器,感应件33为一定栅,但并不以此为限。框架4与基板1相组接,且包含框架主体41、第一导槽45以及第二导槽46。第一导槽45及第二导槽46均形成于框架主体41。第一移动组件2至少部分被容置于第一导槽45并可在第一导槽45中移动。第二移动组件3至少部分被容置于第二导槽46并可
在第二导槽46中移动。连动组件5包含转动件51、第一连接部511及第二连接部512。第一连接部511与第二连接部512设置于转动件51之同侧表面,且第一连接部511与第一移动组件2相连接,第二连接部512与第二移动组件3相连接。
74.于本实施例中,基板1还包含一固定座13及一开口131。固定座13设置于基板1的一端,并用以与护贝机相互连接及固定。开口131设置于固定座13,第一移动组件2的接触端23穿过开口131并与待测物接触。
75.于本实施例中,第一移动组件2还包含第一块体21及第一滑块22。第一块体21与第一滑块22相连接。第一块体21包含一第一凹槽211,且接触端23设置于第一滑块22的一端。第二移动组件3还包含第二块体31及第二滑块32。第二块体31与第二滑块32相连接。第二块体31包含第二凹槽311。感应件33设置于第二滑块32的底面,并与基板1的传感器12相对应。框架4还包含延伸部42、第一通孔43及第二通孔44。延伸部42由框架主体41延伸,第一通孔43及第二通孔44均形成于延伸部42。第一通孔43与第一导槽45相连通,第二通孔44与第二导槽46相连通。第一移动组件2的第一块体21被容置于框架4的第一通孔43中,第一滑块22被容置于第一导槽45中。第二移动组件3的第二块体31被容置于框架4的第二通孔44中,第二滑块32被容置于第二导槽46中。转动件51的第一连接部511卡设于第一块体21的第一凹槽211,第二连接部512卡设于第二块体31的第二凹槽311。藉此,第一移动组件2、转动件51及第二移动组件3之间可相互连接且连动。
76.于本实施例中,连动组件5包含第一固定件52及第二固定件53。转动件51还包含第一穿孔513及第二穿孔514。第一穿孔513及第二穿孔514均形成于转动件51,且第一穿孔513大致呈圆形,第二穿孔514则具有弧形轮廓。第一固定件52穿设于第一穿孔513并与框架4的延伸部42连接,第二固定件53穿设于第二穿孔514并与框架4的延伸部42连接。转动件51可以第一固定件52为轴心旋转,且第一连接部511与第一固定件52之间的距离小于第二连接部512与第一固定件52之间的距离。第二穿孔514的弧形轮廓是根据转动件51的旋转路径设计,藉以使第二固定件53于转动件51旋转的过程中沿着第二穿孔514相对移动。于本实施例中,第一固定件52及第二固定件53可例如但不限于通过锁固、嵌合或卡合的方式与延伸部42相互连接且固定。惟需强调的是,于本实施例中,第二固定件53及第二穿孔514仅是用以避免转动件51于旋转时离开框架4的延伸部42,以提升转动件51旋转时的稳定性,但并不以此为限。于一些实施例中,连动组件5未包含第二固定件53,转动件51亦不包含第二穿孔514。藉此,当第一移动组件2的接触端23与待测物接触而沿着第一方向x1移动时,第一移动组件2可带动第一连接部511于第一方向x1上位移,促使转动件51以第一固定件52为轴心旋转。随着转动件51的旋转,转动件51的第二连接部512可进一步带动第二移动组件3于第二方向x2上位移。通过基板1上的传感器12感测第二移动组件3上感应件33的位移量,可换算出接触端23的位移量,亦即计算出护贝膜的厚度。此外,由于第二连接部512与转动件51的旋转轴心的距离大于第一连接部511与转动件51的旋转轴心的距离,故第二移动组件3的位移量可大于第一移动组件2的位移量,藉此达到放大检测信号以提升测量准确度的功效。
77.请参考图1及图5所示。图5是揭示图1所示的厚度测量装置的第一移动组件、连动组件及第二移动组件的连动关系示意图。第二移动组件3于第二方向x2的位移量与第一移动组件2于第一方向x1上的位移量的关系式可通过以下算式推导,首先:
78.hb
°
+j
°
=k
°-
gb
°
;hb
°
+j
°
+ga
°
=90
°
;k
°-
gb
°
+ga
°
=90
°
;
79.gb
°
=k
°
+ga
°-
90
°
。
80.eb
°
+gb
°
=90
°
=gα
°
+ea
°
;eb
°
+k
°
+ga
°-
90
°
=ga
°
+ea
°
;
81.eb
°
+k
°-
90
°
=ea
°
。
[0082]2×
da
°
+θ
°
=180
°
=2
×
db
°
+θ
°
;da
°
=db
°
。
[0083]
eb
°
+fb
°
=db
°
=da
°
=ea
°
+fa
°
=eb
°
+k
°-
90
°
+fa
°
;
[0084]
由以上关系式可得知:
[0085]
fb
°
=k
°-
90
°
+fa
°
。
[0086]
再者,分别计算第一移动组件2的移动距离及第二移动组件3的移动距离:
[0087][0088][0089][0090][0091]
得知:
[0092][0093]
其中,旋转角度θ为第一移动组件2带动转动件51旋转的角度;夹角k为第一连接部511至第一固定件52的连线与第二连接部512至第一固定件52的连线的夹角;第一半径aa等于第一连接部511与第一固定件52之间的距离;第二半径ab等于第二连接部512与第一固定件52之间的距离;第一移动距离ba为当转动件51旋转时,第一连接部511的移动距离;第二移动距离bb为当转动件51旋转时,第二连接部512的移动距离;第一位移量ca为当转动件51旋转时,第一移动组件2于第一方向x1上的位移量;第二位移量cb为当转动件51旋转时,第二移动组件3于第二方向x2上的位移量。
[0094]
于本实施例中,由于第一移动组件2及第二移动组件3与连动组件5连接,故第一移动组件2及第二移动组件3的移动路径实际上为一弧线,大致可由第一移动距离ba、第二移动距离bb表示。需强调的是,框架4的结构可允许第一移动组件2及第二移动组件3的弧线形移动。
[0095]
通过以上公式,可藉由第二位移量cb推算出第一位移量ca,亦即可藉由检测第二移动组件3上的感应件33于第二方向x2的位移量,推算出待测物的厚度。值得一提的是,当夹角k等于90度时,第二位移量cb与第一位移量ca的比值即等于第二半径ab与第一半径aa的比值。因此,于本实施例中,夹角k以90度为较佳,但并不以此为限。于一些实施例中,夹角
k可介于45度135度之间。于本实施例中,转动件51之旋转角度θ可介于1度至45度之间,且第一方向x1与第二方向x2相互垂直,但并不以此为限。
[0096]
于本实施例中,第一移动组件2还包含第一导杆24,第二移动组件3还包含第二导杆34。第一导杆24穿设第一块体21,且两端分别与第一通孔43的两侧壁相固接。第二导杆34穿设第二块体31,且两端分别与第二通孔44的两侧壁相固接。于本实施例中,第一导杆24与第一方向x1平行,可例如但不限于通过穿设、卡合、黏合、抵顶的方式与第一通孔43的两侧壁相固接,且第一块体21可沿着第一导杆24移动。第二导杆34与第二方向x2平行,可例如但不限于通过穿设、卡合、黏合、抵顶的方式与第二通孔44的两侧壁相固接,且第二块体31可沿着第二导杆34移动。于本实施例中,第一导杆24还包含两个第一凸部241,第二导杆34还包含两个第二凸部341。两个第一凸部241设置于第一导杆24的两端,且与框架4的延伸部42相固接。两个第二凸部341设置于第二导杆34的两端,且与框架4的延伸部42相固接。于本实施例中,第一凸部241及第二凸部341可例如但不限于通过卡合、嵌合、锁固的方式与延伸部42连接并固定。通过第一导杆24、第二导杆34、第一凸部241及第二凸部341的设置,第一移动组件2及第二移动组件3可更稳固地移动,以进一步提升测量的精准度。
[0097]
于本实施例中,第二移动组件3还包含一弹性元件35。弹性元件35套设于第二导杆34,并抵顶于第二块体31与第二通孔44的侧壁之间,以达到第一移动组件2、转动件51及第二移动组件3复位的效果。
[0098]
请参阅图6、图7及图8。图6是揭示本发明第二实施例的厚度测量装置的结构前视图。图7是揭示图6所示的厚度测量装置的立体结构示意图。图8是揭示图6所示的厚度测量装置于一视角的结构爆炸图。于本实施例中,连动组件5a的转动件51a具有较狭长的轮廓,且框架4a还包含至少一第一轴承47及至少一第二轴承48。第一轴承47及第二轴承48均设置于框架主体41。其中第一轴承47与第一移动组件2相接触,第二轴承48与第二移动组件3相接触。于本实施例中,框架4a包含两组第一轴承47及两组第二轴承48。第一轴承47紧邻第一移动组件2的第一块体21的侧面,第二轴承48紧邻第二移动组件3的第二块体31的侧面。藉此,可减少第一移动组件2及第二移动组件3移动时与框架4的摩擦,提升移动的顺畅度,以进一步提升厚度检测的准确度。
[0099]
于本发明第一及第二实施例中,转动件51为一板件。值得一提的是,由于本发明的第一移动组件2及第二移动组件3通过单一的连动组件5连接,故本发明的厚度测量装置可在具有放大检测信号功能的同时,具有相对单纯的结构,可有利于简化组装程序,更可降低元件的制造成本。
[0100]
综上所述,本发明提供一种厚度测量装置,可通过第一移动组件及第二移动组件与连动组件的旋转轴心的距离差异,使第二移动组件具有较大的位移量,达到放大检测信号的功效。第一移动组件及第二移动组件具有可稳定移动的结构,且亦可通过轴承的设置,进一步提升检测准确度。此外,更通过转动件的结构设计,达到简化组装程序并降低制造成本的功效。
[0101]
本发明得由本领域普通技术人员任施匠思而为诸般修饰,然均不脱如附权利要求所欲保护者。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1