异物检查装置和异物检查方法与流程
1.本发明涉及异物检查装置和异物检查方法。
背景技术:
2.在诸如半导体设备、显示设备等的设备的制造中,可以使用将原件(original)的图案转印到基板上的光致抗蚀剂膜上的曝光装置。如果异物附着到原件,那么异物被转印到光致抗蚀剂膜并且可能导致设备中的缺陷。因此,异物检查装置可以被用于检查已附着到原件的异物。
3.原件可以通过传送机器人被传送到异物检查装置。尽管传送机器人将原件相对于异物检查装置对准,但是如果对准精度低,那么布置在原件上的框(frame)(例如,薄膜(pellicle)框)可能被检测为异物。可替代地,异物检查装置可以包括对准机构,但是如果在这种情况下对准精度也低,那么布置在原件上的框可能被检测为异物。因此,根据原件的对准精度,异物检查目标区域可以被设定为充分地远离框的内边缘的区域。然而,在这种情况下,框附近的区域也将被从检查目标区域中排除并且即使存在异物也将不被检测到。
技术实现要素:
4.本发明的一方面是要提供一种即使在被检查物体的对准精度低的情况下也有利于在宽范围上检测已附着到被检查物体的异物的技术。
5.本发明的一个方面提供了一种异物检查装置,该异物检查装置检查包括检查区域和布置在检查区域外侧的非检查区域的被检查物体上的异物的存在/不存在,该装置包括:传感器,被配置成照明被检查物体并且输出通过检测来自包括检查区域的区域的光而获取的结果作为图像;以及处理器,被配置成基于通过从传感器输出的图像中排除作为非检查区域的图像的非检查区域图像而获取的检查区域图像来检测异物,其中,非检查区域图像包括通过来自被检查物体的非检查区域的预定部分的光而生成的第一部分和其像素值从第一部分的像素值起连续的第二部分,并且处理器基于第二部分的像素值从第一部分的像素值起连续的事实来指定第二部分。
6.本发明的另一方面提供了一种异物检查方法,该异物检查方法用于检查包括检查区域和布置在检查区域外侧的非检查区域的被检查物体上的异物,该方法包括:照明被检查物体并且获取通过检测来自检查区域的光而获取的结果作为图像;以及基于通过从该获取中获取的图像中排除作为非检查区域的图像的非检查区域图像而获取的检查区域图像来检测异物,其中,非检查区域图像包括通过来自被检查物体的非检查区域的预定部分的光而生成的第一部分和其像素值从第一部分的像素值起连续的第二部分,并且基于第二部分的像素值从第一部分的像素值起连续的事实在该检测中识别第二部分。
7.根据以下参考附图对示例性实施例的描述,本发明的更多特征将变得清楚。
附图说明
8.图1是示出根据实施例的异物检查装置的布置的视图;
9.图2a和图2b是例示原件作为被检查物体的视图;
10.图3是示出原件的检查区域和布置在检查区域外侧的非检查区域的视图;
11.图4a和图4b是示出异物检查装置的布置的示例的视图;
12.图5是例示图像获取区域的视图;
13.图6是例示已附着有异物的原件的视图;
14.图7是示意性示出通过使用传感器来捕获原件的图像获取区域而获取的图像的视图;
15.图8是用于例示显示在显示单元上的图像的视图;
16.图9是例示异物检查装置的操作的流程图;
17.图10是例示异物检查装置的操作的流程图;
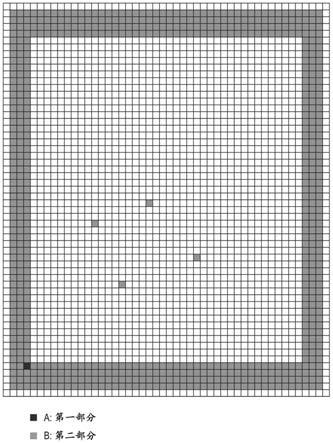
18.图11a和图11b是例示在步骤s202中获取的图像的视图;以及
19.图12是例示在步骤s302中要被切出的图像的视图。
具体实施方式
20.在下文中,将参考附图详细地描述实施例。注意的是,以下实施例不旨在限制要求保护的本发明的范围。在实施例中描述了多个特征,但是并不限制要求所有这样的特征的发明,并且可以适当地组合多个这样的特征。此外,在附图中,相同的附图标记被赋予相同或类似的配置,并且省略其冗余的描述。
21.图1示出了根据实施例的异物检查装置10的布置。图2a示出了作为被检查物体的原件m的平面图,并且图2b示出了原件m的截面图。图3示出了原件m的检查区域21和布置在检查区域外侧的非检查区域22。检查区域21是异物的存在/不存在要被检查的区域,并且非检查区域22是异物的存在/不存在不需要被检查的区域,或者是由于异物检查装置10的规格而不能检查异物的存在/不存在的区域。原件m可以包括例如玻璃基板gs、设置在玻璃基板gs上的图案p(例如,铬图案)、薄膜pl以及与玻璃基板gs接合并且支撑薄膜pl的薄膜框14。检查区域21可以是薄膜框14的内边缘内侧的区域。
22.异物检查装置10检查作为被检查物体的原件m上的异物的存在/不存在。异物检查装置10可以包括传感器s,该传感器s照明包括检查区域21的区域(稍后将描述的图像获取区域15),检测来自该区域的光,并且输出检测结果作为图像(图像数据)。传感器s以这种方式生成并输出图像的操作在下文中也将被称为图像捕获。异物检查装置10还可以包括处理器8,该处理器8基于检查区域图像来检测异物,该检查区域图像是通过从传感器s输出的图像中排除作为非检查区域22的图像的非检查区域图像而获取的图像。非检查区域图像可以包括通过来自原件m的非检查区域22的预定部分的光而生成的第一部分和其像素值从第一部分的像素值起连续的第二部分。处理器8可以基于预定部分的特征来识别第一部分。处理器8可以基于像素值从第一部分的像素值起连续的事实来指定第二部分。原件m的非检查区域22包括薄膜框14(框状部(frame-shaped portion)),并且上述预定部分可以是薄膜框14(框状部)的角部。可替代地,上述预定部分可以是可以由设置在薄膜框14上的标记等标识的部分。
23.处理器8可以由例如诸如fpga(现场可编程门阵列的缩写)之类的pld(可编程逻辑器件的缩写)、asic(专用集成电路的缩写)、嵌入有程序的通用计算机、或者这些组件的全部或一些的组合形成。
24.传感器s可以包括光照射器6和光检测器7,该光照射器6以相对于原件m的表面的法线倾斜的角度用光照射原件m的表面,该光检测器7检测来自该表面上的异物的光(反射光或散射光)。光检测器7被布置成使得来自原件m的表面(不存在异物的区域)的镜面反射光将不进入光检测器7。光照射器6可以包括光源1和用于利用来自光源1的光照射原件m的光学系统2。光检测器7可以包括光电转换器4(例如,光电倍增管)和用于将来自原件m上的异物的光聚焦到光电转换器4的光学系统3。传感器s被配置成输出图像获取区域15的图像,该图像获取区域15除了检查区域21之外包括非检查区域22的至少一部分。在图5中例示了图像获取区域15。在图5中示出的示例中,图像获取区域15是包含检查区域21和薄膜框14的区域。
25.异物检查装置10还可以包括保持原件m的检查台5以及在预定方向(y方向)上扫描或驱动检查台5的驱动机构9。在一个示例中,光照射器6可以用光照射原件m,以便在x方向(主扫描方向)上扫描原件m,并且驱动机构9可以驱动原件m,以便在y方向(副扫描方向)上扫描原件m。在另一个示例中,光照射器6可以被配置成用带状光照射原件m,该带状光的宽度可以覆盖图像获取区域15在x方向上的宽度。驱动机构9可以在预定方向上驱动传感器s,而不是驱动原件m。
26.异物检查装置10还可以包括显示单元41。处理器8可以控制显示单元41显示检查区域图像。处理器8还可以控制显示单元41,使得异物检查结果将被叠加并显示在检查区域图像上。图6示意性地示出了已附着有异物16的原件m。图7示意性地示出了通过使用传感器s来捕获图6中示出的原件m的图像获取区域15而获取的图像。图8示意性地示出了要被显示在显示单元41上的检查结果。检查结果可以被显示为例如通过将检查区域图像划分为多个单位区域并且针对每个单位区域映射指示检查结果的信息(指示异物的存在/不存在的信息)而获取的图像。每个单位区域可以被任意地设定为例如5mm2区域。
27.图4a示出了异物检查装置10的平面图,并且图4b示出了异物检查装置10的侧视图。原件m可以通过传送机器人12被装载到异物检查装置10中。传送机器人12可以被配置成传送由例如盒板(cassette plate)13保持的原件m。异物检查装置10可以包括将原件m相对于以上提到的检查台5对准的对准机构11。
28.图9例示了异物检查装置10的操作。图9中示出的操作可以由处理器8控制。在步骤s201中,原件m通过传送机器人12被装载到异物检查装置10中,并且由检查台5保持。在原件m通过传送机器人12被装载到异物检查装置10中之前,传送机器人12可以使用对准机构11来对准原件m。注意的是,这样的对准操作可以通过使用另一装置或机构来执行或者在异物检查装置10中执行。在步骤s202中,处理器8使传感器s捕获原件m的图像获取区域15并且获取从传感器s输出的图像。在这种情况下,考虑到要在检查台5上对准的原件m的对准精度,图像获取区域15可以被预先设定以便充分地确保原件m的检查区域21将落入要由传感器s捕获的区域内。因此,更严格地,图像获取区域15可以在原件m已没有误差地在检查台5上被精确地对准的状态下匹配要由传感器s捕获的区域。
29.在步骤s203中,处理器8指定(specifies)通过从在步骤s202中获取的图像中排除
作为非检查区域22的图像的非检查区域图像而获取的检查区域图像。检查区域图像与包括图8中示出的区域的图像相对应。稍后将详细地描述步骤s203的处理。
30.在步骤s204中,处理器8基于在步骤s203中指定的检查区域图像来确定(或检查)异物的存在/不存在。在这种情况下,如果形成检查区域图像的像素(或单位区域)的像素值等于或大于预定值,那么处理器8可以确定在与该像素(或单位区域)对应的区域中存在异物。在步骤s205中,处理器8控制显示单元41显示异物检查结果。处理器8可以控制显示单元41,使得检查结果将以图8中示出的示例的方式被叠加并显示在检查区域图像上。在步骤s206中,原件m通过传送机器人12被从异物检查装置10卸载。如果在步骤s204中确定存在异物,那么在步骤s206中已被卸载的原件m可以被传送到用于清洁处理的清洁装置。
31.图10示出了图9的步骤s203的处理的更具体示例。在步骤s301中,处理器8确定在步骤s202中获取的图像中的基准位置。图11a示出了在步骤s202中获取的图像的示例。在图11a中,用黑色填充的像素(或单位区域)和用灰色填充的像素(或单位区域)形成薄膜框图像,该薄膜框图像由来自原件m的非检查区域22中所包括的薄膜框14(框状部)的光形成。薄膜框图像可以是非检查区域图像的一部分。在图11a中,黑色和灰色不是用于指示图像的色调的颜色,而是为了方便描述而添加的颜色。另外,用黑色填充的像素(或单位区域)形成非检查区域图像的第一部分a。用灰色填充的每个像素(或每个单位区域)形成第二部分b,该第二部分b是非检查区域图像的与第一部分a不同的部分。
32.处理器8可以将预定部分(例如,左下的角部),即,该示例中的第一部分a,确定为由来自原件m的非检查区域22中所包括的薄膜框14的光形成的薄膜框图像(框状部)中的基准位置。可以通过使用例如如图11b中所示的模板通过模板匹配来执行预定部分的检测。预定部分可以是可以由标记等标识的图像的一部分。根据该实施例,如果第一部分a被包括在步骤s202中由传感器s捕获的图像中,那么可以指定第一部分a。随后,可以基于从所指定的第一部分a的像素值的连续性来指定每个第二部分b,可以基于每个部分b的指定来指定非检查区域图像,并且可以基于非检查区域图像来指定检查区域图像。因此,与检查目标区域的外边缘被设定为与薄膜框14的内边缘充分地分开的情况相比较,即使原件m的对准精度低,也可以在宽范围上检测已附着到原件m的异物。
33.在步骤s302中,处理器8从在步骤s202中获取的图像中切出基于上述基准位置作为基准的预定范围。图12示意性地示出了在步骤s302中要被切出的图像。预定范围的大小可以被预先设定,以便确保检查区域图像将被包括在该范围中,并且可以例如基于x方向上的长度(例如,像素计数)和y方向上的长度(例如,像素计数)来设定预定范围的大小。用于从图像中切出预定范围的处理可以是例如用于指定图像中的预定范围的处理。
34.在步骤s303中,处理器8基于在步骤s302中切出的图像中的像素值的连续性来指定非检查区域图像。更具体地,处理器8可以基于像素值从第一部分a的像素值起连续的事实来指定每个第二部分b。第一部分a和第二部分b由各自具有等于或大于预定值的像素值的像素形成。如果每个相邻像素具有等于或大于预定值的像素值,那么处理器8可以确定相邻像素的像素值具有连续性。可替代地,第一部分a和第二部分b可以由各自具有饱和像素值的像素形成,并且如果每个相邻像素具有饱和像素值,那么处理器8可以确定相邻像素的像素值具有连续性。步骤s301和s302的处理不需要总是被执行,并且在将不执行步骤s301和s302的情况下,可以在步骤s301中指定第一部分a。
35.在步骤s304中,处理器8可以将通过从在步骤s302中切出的图像中排除在步骤s303中指定的非检查区域图像而获取的图像指定为检查区域图像。可替代地,处理器8可以将通过从在步骤s202中获取的图像中排除比在步骤s303中指定的非检查区域图像的内边缘更接近外侧的区域而获取的图像指定为检查区域图像。
36.在原件m当中,可能存在仅在其整体的一部分(例如,一半)上具有图案p的原件。为了应对这种情况,处理器8可以被布置成使得用户可以仅将原件m的一部分指明为检查目标。例如,处理器8可以被布置成使得用户可以预设指示要被设定为检查目标的区域的信息。处理器8可以基于这样的预设信息从检查区域图像中提取检查目标区域,并且通过以该检查目标区域为目标来检查异物的存在/不存在。
37.被检查物体不限于原件m,并且只要是可以基于像素值的连续性来指定非检查区域图像的物体就足够了。被检查物体可以是例如用于通过使原件平坦来校正原件的单元。
38.其它实施例
39.本发明的(一个或多个)实施例还可以通过读出并执行记录在存储介质(也可以被更完整地称为“非瞬态计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或包括用于执行上述(一个或多个)实施例中的一个或多个实施例的功能一个或多个电路(例如,专用集成电路(asic))的系统或装置的计算机来实现,以及通过例如从存储介质读出并执行计算机可执行指令以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或控制一个或多个电路以执行上述(一个或多个)实施例中的一个或多个实施例的功能而通过由系统或装置的计算机执行的方法来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu)),并且可以包括单独计算机或单独处理器的网络,以读出并执行计算机可执行指令。计算机可执行指令可以例如从网络或存储介质提供到计算机。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储装置、光盘(诸如紧凑盘(cd)、数字多功能盘(dvd)或蓝光盘(bd)
tm
)、闪存设备、存储卡等中的一个或多个。
40.本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
41.虽然已参考示例性实施例描述了本发明,但要理解的是,本发明不限于所公开的示例性实施例。随附权利要求的范围应被赋予最宽泛的解释,以包含所有这样的修改以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1