一种基于高精度地图的车联网显示系统的制作方法
[0001]
本发明属于汽车技术领域,提供车联网信息可视化交互,具体涉及一种基于高精度地图的车联网显示系统。
背景技术:
[0002]
随着物联网技术的不断发展,智能网联汽车行业更是不断火热。车联网随着5g技术的发展,将会成为未来智能汽车领域的一大重点研究方向。目前车联网不仅是车与车的互联,也能完成车与基础设施的互联,多样化的互联使得信息互通成为可能。目前车联网技术可视化有一定的局限,驾驶员可以得到车联网收到的红绿灯的信息,却不能准确判断红绿灯所处的位置;驾驶员可以得到前方车辆传来的报警提示,判断具体车辆时却不太直观。对于地图而言,现实中车道线、指示牌、信号灯等的坐标是绝对坐标,并不会随车辆移动而产生变化。因此对于车辆而言,所有车辆所处的周边环境是固定的。随着高精度地图技术的发展,地图元素越来越丰富,地图的精度相较于导航地图而言也更加高。因此对于高精度地图进行可视化可完美还原车辆周围相对固定的环境,对于车辆的决策和驾驶的体验而言都是巨大的提升。
[0003]
现有的技术是将高精度地图信息与v2x信息通过ar-hud投射在前挡风玻璃上,但势必会带来以下三个问题:
[0004]
1.受限于车辆行驶安全,在前挡中高精度地图信息仅获取部分信息进行叠加显示,无法渲染显示完整的高精度地图。
[0005]
2.受限于人眼视角,高精度地图信息仅有车辆前方部分可显示,对于车辆左右及后面无法实现全方位显示。
[0006]
3.受限于人眼视角,经过ar-hud与现实叠加后的v2x信息也仅能显示前方信息,却无法显示后方车辆相关信息。
[0007]
4.受限于v2x设备搭载,无v2x功能的车辆在前挡中不显示信息交互,会给驾驶员产生v2x是否存在的疑惑,从而可能导致错误判断,引发危险。
技术实现要素:
[0008]
本发明的目的就是为了解决上述背景技术存在的不足,提供一种基于高精度地图的车联网显示系统,实现全方位v2x信息显示。
[0009]
本发明采用的技术方案是:一种基于高精度地图的车联网显示系统,包括
[0010]
组合惯导模块,用于获取车辆的惯导定位信息发送至中控显示模块;
[0011]
v2x收发模块,用于获取周边车辆的v2x信息,发送至中控显示模块;
[0012]
can收发模块,用于获取车辆can总线中的行车信息发送至中控显示模块,
[0013]
高精度地图模块,用于将高精度地图信息发送至中控显示模块;
[0014]
中控显示模块,用于根据高精度地图信息进行建模获得基于高精度地图的底图模型,将所述惯导定位信息、v2x信息和行车信息进行整合后叠加在所述底图模型上得到实时
的车辆网模型,并进行显示。
[0015]
进一步地,所述组合惯导模块采用北斗基站或者千寻服务进行rtk得到厘米级的自车惯导定位信息。
[0016]
进一步地,所述v2x信息包括车联网事件和车联网信息,所述车联网事件包括碰撞事件、超车事件和预警事件,所述车联网信息包括周边基础设施信息。
[0017]
进一步地,所述v2x收发模块通过can总线将v2x信息发送至obd设备的can线上,obd设备将惯导定位信息传输到can收发模块中,can收发模块将接收的信息通过rs232串口发送至中控显示模块。
[0018]
进一步地,所述惯导定位信息通过网口传输方式发送至中控显示模块,所述网口传输方式为:组合惯导模块将惯导定位信息通过网口发给v2x收发模块,所述v2x收发模块与中控显示模块之间建立wifi连接,将接收的惯导定位信息通过wifi发送至中控显示模块。
[0019]
进一步地,所述惯导定位信息通过can总传输方式发送至中控显示模块,所述can总传输方式为:组合惯导模块将惯导定位信息通过can总线发给obd设备的can线上,obd设备将惯导定位信息传输到can收发模块中,can收发模块将接收的惯导定位信息通过rs232串口发送至中控显示模块。
[0020]
进一步地,所述惯导定位信息通过串口传输方式发送至中控显示模块,所述串口传输方式为:组合惯导模块将惯导定位信息通过串口发给中控显示模块。
[0021]
进一步地,所述行车信息包括车速、车灯、转向角信息。
[0022]
进一步地,所述中控显示模块从高精度地图信息中提取几何属性及poi数据、提取车辆周边标志物信息,采用3d建模引擎对提取出的信息进行建模和渲染获得底图模型。
[0023]
更进一步地,所述周边标志物包括车道线、红绿灯、指示牌、地面箭头、周边建筑中的一种或多种。
[0024]
本发明引入高精度地图、组合惯导和v2x相结合,实现v2x信号的可视化显示,提高了驾驶员的人机交互体验;同时增强车联网信息显示,使驾驶员对于车联网信息有进一步的了解,可对未知风险提前应对,使驾驶更加安全。
附图说明
[0025]
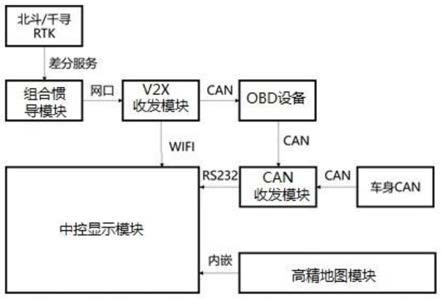
图1为本发明网口传输方式的示意图。
[0026]
图2为本发明can总线传输方式的示意图。
[0027]
图3为本发明串口传输方式的示意图。
[0028]
图4为本发明基于高精度地图建模的示意图。
具体实施方式
[0029]
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以互相结合。
[0030]
如图1-4所示,本发明提供一种基于高精度地图的车联网显示系统,包括
[0031]
组合惯导模块,用于获取车辆的惯导定位信息发送至中控显示模块;
[0032]
v2x收发模块,用于获取周边车辆的v2x信息,发送至中控显示模块;
[0033]
can收发模块,用于获取车辆can总线中的行车信息发送至中控显示模块,
[0034]
高精度地图模块,用于将高精度地图信息发送至中控显示模块;
[0035]
中控显示模块,用于根据高精度地图信息进行建模获得基于高精度地图的底图模型,将所述惯导定位信息、v2x信息和行车信息进行整合后叠加在所述底图模型上得到实时的车辆网模型,并进行显示。
[0036]
实现上述车联网系统具体过程如下:
[0037]
第一步:设备搭载。在车辆上搭载高精度地图模块和组合惯导模块,组合惯导模块提供厘米级的定位。在车上搭载车联网obu,在基础设施例如红绿灯上搭载rsu,车联网obu与rsu一起形成能获取v2x信息的v2x收发模块。组合惯导模块与v2x收发模块(即车联网obu)之间可采用串口、网口或者can总线连接。
[0038]
第二步:标定。标定组合惯导模块定位精度,使得车辆定位精度达到厘米级。调试车辆v2x收发模块,使得车辆车联网之间的信息正常接收与发送。
[0039]
第三步:建模。从区域高精度地图原始点云数据中提取几何属性及poi数据,提取出车道线、红绿灯、指示牌、地面箭头、周边建筑等信息。采用unity等3d建模引擎对提取出的信息进行建模和渲染,获得底图,将自车车辆模型建模后导入底图中。
[0040]
第四步:自车从组合惯导模块中获得自车定位和姿态信息,用于定义底图中自车的经纬度和航向角。v2x收发模块中同时获取组合惯导设备的定位信息,并通过车联网服务将自车定位信息共享给周边车辆。同理自车也会收到周边其他车辆的定位信息,将其他车辆的定位信息导入底图中,在底图中便得到了周边的环境车辆。
[0041]
第五步:自车车联网服务同时获取从他车而来的事件信息,例如碰撞事件,超车事件和预警事件等。事件触发后在中控高精度地图底图模型上进行叠加显示,同时在底图中标注出发出信息的车辆,给驾驶员直观的感受。自车车联网服务同时获取周边基础设施的车联网信息,例如红绿灯状态等。同样叠加在高精度地图底图模型上,并标注出自车与红绿灯的相对位置关系,形成最终的车辆网模型。
[0042]
第六步:车辆网模型可固化在中控系统中进行显示,可呈现周边环境的高精度地图以及车联网信息。
[0043]
以下通过三个实例分别对组合惯导模块的多种不同的数据传输方式进行说明:
[0044]
实例一
[0045]
如图1所示,数据采用网口传输的方式。
[0046]
第一步:组合惯导模块包括gnss和imu,采用北斗基站或者千寻服务进行rtk,得到厘米级的自车定位信息。
[0047]
第二步:组合惯导模块将定位信息从网口发给v2x收发模块,v2x收发模块自带wifi,车机可连接v2x收发模块的wifi,中控显示模块同时也借着v2x收发模块的wifi直接获取到组合惯导模块的定位信息。
[0048]
第三步:v2x收发模块将车联网事件相关的信息通过can线传输到can收发模块中,同时车身can也将车辆自身can总线相关基础信息通过can线传输给can收发模块。
[0049]
第四步:can收发模块将相关信号通过rs232串口传输给中控显示模块。
[0050]
第五步:中控显示模块通过获取区域的高精度地图,并且在3d建模引擎例如unity
上进行建模,获得基于高精度底图的底图模型,将得到的数据整合后在3d建模引擎上进行显示。
[0051]
实例二
[0052]
如图2所示,数据采用can总线传输的方式。
[0053]
第一步:组合惯导模块包括gnss和imu,采用北斗基站或者千寻服务进行rtk,得到厘米级的自车定位信息。
[0054]
第二步:组合惯导模块将定位信息直接通过can总线发给obd设备的can线上,obd设备将定位信息传输到can收发模块中。
[0055]
第三步:v2x收发模块将车联网事件相关的信息通过can线传输到can收发模块中,同时车身can也将车辆自身can总线相关基础信息通过can线传输给can收发模块。
[0056]
第四步:can收发模块将相关信号通过rs232串口传输给中控显示模块。
[0057]
第五步:中控显示模块通过获取区域的高精度地图,并且在3d建模引擎例如unity上进行建模,获得基于高精度底图的底图模型,将得到的数据整合后在3d建模引擎上进行显示。
[0058]
实例三
[0059]
如图3所示,数据采用串口传输的方式。
[0060]
第一步:组合惯导模块包括gnss和imu,采用北斗基站或者千寻服务进行rtk,得到厘米级的自车定位信息。
[0061]
第二步:组合惯导模块将定位信息从串口发给v2x收发模块,同时串口数据也发给中控显示模块,中控显示模块通过串口接收到组合惯导模块的定位信息,其延迟很小。
[0062]
第三步:v2x收发模块将车联网事件相关的信息通过can线传输到can收发模块中,同时车身can也将车辆自身can总线相关基础信息通过can线传输给can收发模块。
[0063]
第四步:can收发模块将相关信号通过rs232串口传输给中控显示模块。
[0064]
第五步:中控显示模块通过获取区域的高精度地图,并且在3d建模引擎例如unity上进行建模,获得基于高精度底图的底图模型,将得到的数据整合后在3d建模引擎上进行显示。
[0065]
如图4所示,展示了基于高精度地图的车辆网模型的建模显示架构:
[0066]
第一步:由地图采集车获得区域的高精度地图,此时地图数据为激光原始点云数据。
[0067]
第二步:将激光点云数据进行提取,获得车道线、指示牌、信号灯及周边建筑等信息,同时包括这些信息的几何属性和拓扑结构。
[0068]
第三步:将提取的高精度地图数据导入到如unity等3d建模引擎中。同时建立自车和他车的3d模型,导入到3d建模引擎中。3d引擎对这些元素进行建模,最终获得基于高精度地图的底图模型并导入到中控显示程序中。
[0069]
第四步:中控显示模块获得车身车速、灯、转向角等信号,同时获得v2x事件触发信号,对这些信号进行ui设计,并展现在中控显示屏上,即可正常获取v2x传递的信息并且正确显示在基于高精度地图的界面中。
[0070]
本发明形成的车联网显示系统具有以下特征:
[0071]
第一:高精度地图由实际地图渲染建模形成,为全局地图,更具有全局路径规划意
义。
[0072]
第二:具有v2x功能的车辆在地图中实时显示,不具有v2x功能的车辆不显示,驾驶员可准确判断车辆行驶情况,保证安全。
[0073]
第三:驾驶员视野扩展,全局地图使得驾驶员不仅能获得前方车辆v2x信息,后方车辆v2x信息也可从系统中实时看出,便于驾驶员做全局判断。
[0074]
以上仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明所揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1