一种线激光与机械臂标定方法与流程
[0001]
本发明涉及机械臂与机器视觉运动控制领域,尤其是涉及一种线激光与机械臂标定方法。
背景技术:
[0002]
线激光扫描成像是一种非接触主动式三维成像方法,其工作原理是发射一条线激光到目标物体上,摄像头通过某个固定角度检测该激光在物体上的反射信息,然后通过三角测量原理确定物体表面的高度和宽度信息。其具有扫描速度快、成像精度高、测量过程便捷等特点,被广泛地应用于工业现场目标检测、形貌重建以及特征匹配等方面。
[0003]
线激光的标定往往和目标体的三维模型数据采集、采样、匹配以及重建等流程具有很大关系,尤其是一些对精度有一定限制的应用场合,例如视觉引导机械臂运动、视觉引导移动物运动等方面,在无法满足精度使用要求范围的情况下,往往会造成机械臂定位不准确、移动物路径规划偏离等因素,将直接导致整个系统的功能失效。因此,如何准确地、快速地标定线激光器的使用参数,这在工业现场中是一项比较有意义的问题。
[0004]
中国发明专利cn111272102a介绍了一种线激光扫描三维测量标定方法,其在不变换标定板姿态的情况下实现线激光扫描快速标定,可有效降低标定过程和计算的复杂度,但是此类方法容易受到实际现场光照强度的影响,在工业现场中的使用条件较为严格,不利于快速标定。
技术实现要素:
[0005]
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种线激光与机械臂标定方法。
[0006]
本发明的目的可以通过以下技术方案来实现:
[0007]
一种线激光与机械臂标定方法,该方法包括以下步骤:
[0008]
步骤s1:获取球形工具激光扫描点云数据;
[0009]
步骤s2:通过最小z值查寻算法从球形工具激光扫描点云数据中找出最小z 值扫描点云数据;
[0010]
步骤s3:获取机械臂的位置姿态数据,并找出最小z值扫描点云数据对应的最小z值位置姿态数据;
[0011]
步骤s4:求解最小z值扫描点云数据与最小z值位置姿态数据之间的变换矩阵集
[0012]
步骤s5:去除变换矩阵集中包含虚数的变换矩阵,去除变换矩阵集中所有项的实部绝对值相同的变换矩阵,得到最优变换矩阵完成线激光与机械臂的标定。
[0013]
所述的步骤s1中球形工具激光扫描点云数据通过位于机械臂末端的激光器获取。
[0014]
所述的最小z值查寻算法查寻激光器距离球形工具的球面最近时的球形工具激光扫描点云数据,即最小z值扫描点云数据。
[0015]
所述的机械臂的位置姿态数据从机械臂控制器中读取。
[0016]
所述的步骤s2中对是否找出最小z值扫描点云数据进行判断,若是,执行步骤s3,若否,执行步骤s1。
[0017]
所述的步骤s4中最小z值扫描点云数据与最小z值位置姿态数据组成元素数量为n的数据组p
i
,若n大于设定值n,且数据组p
i
中任一值不为空,执行步骤 s4,否则,执行步骤s1。
[0018]
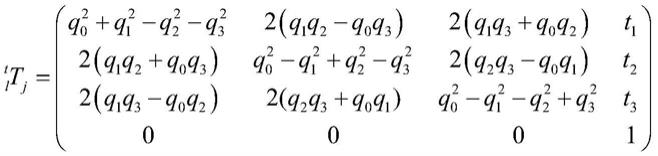
所述的变换矩阵集为:
[0019][0020]
其中,q0、q1、q2、q3为旋转矩阵元素,t1、t2和t3为位移向量元素。
[0021]
所述求解旋转矩阵元素和位移向量元素的公式为:
[0022][0023]
其中,为机械臂-基坐标系变换矩阵,x
b
、y
b
和z
b
分别为机械臂的最小z 值位置姿态数据对应的x、y和z三轴坐标,x
l
和z
l
为最小z值扫描点云数据对应的x和z轴坐标。
[0024]
所述的步骤s5中通过对最优变换矩阵进行重投影得到标定评估结果,所述重投影的误差为:
[0025][0026][0027]
其中,x
b
是机械臂的最小z值位置姿态数据对应的x轴坐标,为机械臂
-ꢀ
基坐标系变换矩阵,x
l
为最小z值扫描点云数据对应的x轴坐标。
[0028]
根据重投影进行标定评估info的公式为:
[0029][0030]
其中,δ为预期使用精度阈值。
[0031]
与现有技术相比,本发明具有以下优点:
[0032]
涉及的标定物为球形工具,该物体方便寻找,成本低廉;可以帮助线激光和机械臂在广泛应用场景下实现快速手眼标定,整个过程自动化程度高、操作简单、标定结果可靠,
可满足实际现场的使用要求。
附图说明
[0033]
图1为本发明的流程图;
[0034]
图2为本发明的结构示意图;
[0035]
图3为本发明的最小z值扫描点云数据示意图。
具体实施方式
[0036]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0037]
实施例
[0038]
本实施例提供一种基于球形工具的线激光与机械臂快速标定方法,如图1所示,该方法包括以下步骤:
[0039]
步骤s1:获取球形工具激光扫描点云数据;
[0040]
步骤s2:通过最小z值查寻算法从球形工具激光扫描点云数据中找出最小z 值扫描点云数据;
[0041]
步骤s3:获取机械臂的位置姿态数据,并找出最小z值扫描点云数据对应的最小z值位置姿态数据;
[0042]
步骤s4:求解最小z值扫描点云数据与最小z值位置姿态数据之间的变换矩阵集
[0043]
步骤s5:去除变换矩阵集中包含虚数的变换矩阵,去除变换矩阵集中所有项的实部绝对值相同的变换矩阵,得到最优变换矩阵完成线激光与机械臂的标定。
[0044]
具体而言:
[0045]
1、将激光器固定安装在机械臂末端,如图2所示,通过机械臂控制器使机械臂以任意姿态运动至球形工具附近,激光器发射激光并接收球形工具激光扫描点云数据;
[0046]
2、将扫描后的球形工具激光扫描点云数据保存为文本文件;
[0047]
3、执行球形工具激光扫描点云数据处理程序,进行最小z值查寻算法,返回一个最小z值扫描点云数据及对应的索引位置坐标i1,最小z值扫描点云数据减去球形工具的半径r得到球心扫描点云数据;
[0048]
4、当查询成功后,从机械臂控制器读取机械臂的位置姿态数据,并返回各位置姿态数据对应的索引位置坐标集ir;
[0049]
5、根据i1从ir中找到对应的索引位置坐标i2,将i1所对应的最小z值扫描点云数据与i2所对应的最小z值位置姿态数据进行对应成对保存,记录为p
i
,其中,i=1,2,
…
,n,i为每组标定点对应的对数的编号,n为对数。
[0050]
6、当满足求解的条件,构建求解器(如图3所示)对激光坐标系与机械臂坐标系之间的变换矩阵集进行求解,其中j=1,2,
…
,m,j为解的编号,m为解的数量;
[0051]
7、根据上一步骤的结果,建立解的筛选条件,从中得到一组最优结果解
[0052]
8、对输出的最优结果解进行重投影误差检验,并输出结果评估指标分析数据。
[0053]
9、根据结果评估指标分析数据,输出标定结果以及评价信息。
[0054]
进一步,变换矩阵集采用以下方法进行求解:
[0055]
激光坐标系下的坐标为p
l
,在基坐标系下的坐标为p
b
,一般情况下,激光坐标系到工具坐标系的变换可以分为旋转矩阵和位移矩阵则激光坐标系到工具坐标系的变换关系为:
[0056][0057]
工具坐标系到基坐标系的变换关系为:
[0058][0059]
因此可以推导出激光坐标系到基坐标系的变换关系为:
[0060][0061]
由此可知:
[0062][0063]
其中矩阵是已知可求的,本实施例是基于球形工具的球心进行求解,p
b
为球心坐标属于不变量,因此可根据四元数方法(用q0,q1,q2,q3表示)来表示矩阵:
[0064][0065]
则式可以化为:
[0066][0067]
可以看出,至少需要三组数据并两两作差就可以组成6组方程,但是所求矩阵有7个未知量,再结合单位四元数的约束:
[0068][0069]
这样就可以构成7组方程进行求解,将结果代回式可以得到相应的解。
[0070]
进一步,本实施例在标定过程中存在判断步骤:
[0071]
判断1:步骤s2中对是否找出最小z值扫描点云数据进行判断,若是,执行步骤s3,若否,执行步骤s1;
[0072]
判断2:步骤s4中最小z值扫描点云数据与最小z值位置姿态数据组成元素数量为n的数据组p
i
,若n大于设定值n,且数据组p
i
中任一值不为空,执行步骤s4,否则,执行步骤s1。
[0073]
进一步,本实施例涉及的重投影误差检验是根据:
[0074][0075]
将上述结果和原始数据(即机械臂的最小z值位置姿态数据)进行重投影代回计算,设定误差描述为:
[0076][0077]
其中,x
b
是机械臂的最小z值位置姿态数据对应的x轴坐标,为机械臂
-ꢀ
基坐标系变换矩阵,x
l
为最小z值扫描点云数据对应的x轴坐标。
[0078]
根据重投影进行标定评估的公式为:
[0079][0080]
其中,δ为预期使用精度阈值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1