基于循环移频环的固态激光雷达探测方法及系统与流程
[0001]
本发明涉及一种固态激光雷达探测方法,尤其涉及一种采用循环移频环及波长(频率)色散技术的固态激光雷达探测方法及系统。
背景技术:
[0002]
激光雷达广泛应用于自动驾驶、智能机器人、三维传感等领域。为了获取探测场景/目标的三维/二维空间分布信息,目前激光雷达系统多采用机械扫描方式实现激光波束的空间二维/一维扫描,从而获取目标角度信息,并基于脉冲时间到达技术获取目标距离信息(参见[j.liu,q.sun,z.fan,y.jia,,"tof lidar development in autonomous vehicle,"ieee 3rd optoelectro-nics global conference,2018.])。但由于机械部件结构复杂、易磨损、稳定性及寿命受限,导致基于机械扫描方式的方案其在高精度、高稳定、长寿命应用受限。与此同时,硅光相控阵、液晶波导、光晶体波导等固态波束控制技术的方案也在快速发展,这些技术采用电控实现激光波束的快速扫描,与机械扫描相比具有更好的稳定性及鲁棒性(参见[c.poulton,a.yaacobi,d.cole,etc,"coherent solid-state lidar with silicon photonic optical phased arrays,"optics letters,vol.42,no.20,pp.4091-4094,2017.]),然而相关技术综合性能及系统成熟度目前有限。但固态波束控制技术因其潜在的优势特性,仍吸引着广大科研工作者推动其向实用化方向发展。对于距离信息,因调频连续波外差法相比脉冲到达时间法具有更高的动态范围及探测灵敏度,以及对自然光干扰有一定抵抗作用,从而被广泛研究。综上,将固态波束控制技术及调频连续波外差法两个优势技术结合起来,将有可能推动高性能激光雷达的进一步发展。论文(参见[m.okano,c.chong,"swept source lidar:simultaneous fmcw ranging and nonme-chanical beam steering with a wideband swept source,"optics express,vol.28,no.16,pp.23898-23915,2020.])提出了一种基于垂直腔体激光器(vcsel)宽带扫频源的激光雷达方案,通过将宽带连续扫频源分段并利用波长色散机理实现目标距离、角度二维信息的同时获取,系统结构简单,效率高。但因为基于vcsel的扫频源存在非线性且相干长度有限,导致该方案需要较复杂的非线性校正电路及非线性校正算法补偿非线性,此外,探测距离也受到一定限制。
[0003]
针对以上问题,本发明提出了一种新的解决思路。基于光循环移频技术将高线性度、高相干长度的窄带扫频光信号扩展到宽带扫频,基于波长色散实现一维光波束扫描,无需非线性校正电路及算法。并基于去调频技术获取目标距离信息,因信号源较高的相干长度,使得系统可以实现远距离目标探测。此外,因为循环移频环参数灵活可调,使激光雷达系统具有较高的灵活性,面对不同探测场景可快速灵活切换。
技术实现要素:
[0004]
本发明所要解决的技术问题在于:克服现有技术不足,基于光循环移频技术实现宽带激光雷达探测信号的产生,基于波长色散技术实现激光波束的空间扫描,基于光域调
频技术实现高分辨率目标距离信息的获取。系统产生线性扫频信号线性度高、相干性好,可同时实现角度、距离二维信息的同时获取,大大提高雷达系统的工作效率。
[0005]
本发明具体采用以下技术方案解决上述技术问题:
[0006]
一种基于循环移频环的固态激光雷达探测方法,该方法具体为:
[0007]
将窄带扫频光信号f
l_1
送入循环移频环得到包含n个扫频子带f
l_i
(i=1,2,
…
,n)的宽带扫频光信号,将宽带扫频光信号分为两路,其中一路作为参考光信号,而另一路通过光准直镜送入色散单元;色散单元控制宽带扫频光信号不同频率扫频子带信号在自由空间中依次指向不同方向,得到一系列指向不同方向的探测光信号;探测光信号遇到目标后反射回色散单元得到接收光信号,经光准直镜接收后与参考光信号合为一路待检测光信号;待检测光信号完成光电转换,得到携带目标信息的中频电信号,对该中频电信号进行采集及信号处理即可得到目标的高精度二维空间分布信息。
[0008]
优选地,所述循环移频环的具体工作方式为:窄带扫频光信号f
l_1
进入2
×
2光耦合器的第一输入端并分为两路,2
×
2光耦合器的第一输出端输出信号作为宽带扫频光信号子周期内的扫频子带信号,2
×
2光耦合器的第二输出端输出信号通过电光移频器移频δf,得到窄带扫频光信号f
l_2
;窄带扫频光信号通过光放大及光延时后进入2
×
2光耦合器的第二输入端与窄带扫频光信号f
l_1
进行相同的操作;当第n个窄带扫频光信号f
l_n
产生后,控制循环移频环中的光开关使环路断开,即完成周期为nt、带宽为(n-1)δf+b的宽带扫频光信号产生,其中b与t分别为扫频子带信号的带宽与子周期。
[0009]
进一步地,所述宽带扫频光信号的子带信号f
l_i
(i=1,2,
…
,n)具有可调节的相同带宽b及周期t;扫频子带信号中心载频频率间隔δf可调,且与其带宽b之间需满足δf≥b;通过调节子带信号带宽b可实现探测距离分辨率的改变,通过调节频率间隔δf可实现探测角度间隔的改变;窄带扫频光信号f
l_1
每隔nt时间开始输出信号,与所述光开关的开关周期nt同步。
[0010]
进一步地,所述色散单元具体工作方式为:基于波长(频率)色散原理,扫频子带f
l_i
依次通过色散单元后,在空间中光波束方向依次分别指向θ
i
,实现空间中一维波束扫描,其中波束扫描范围为δθ=θ
n-θ1,通过增加宽带扫频光信号的带宽(n-1)δf+b可以扩大δθ。
[0011]
优选地,所述色散单元为衍射光栅、棱镜、液晶;
[0012]
优选地,所述窄带扫频光信号由线性调频电信号通过电光调制器调制单频激光信号所得;所述电光调制器为马赫-曾德尔调制器、相位调制器、双平行马赫-曾德尔调制器、强度调制器;根据所采用电光调制器的种类,可在调制器后选择性级联光滤波器;通过选择高阶调制边带,窄带扫频光信带宽相对于线性调频电信号带宽可实现倍频。
[0013]
进一步地,还包括目标三维信息获取步骤:将二维空间分布信息与机械扫描技术获取的信息结合,实现目标三维信息获取,其中所述机械扫描技术为微机电扫描镜、检流计扫描仪、多面镜扫描器、伺服电机。
[0014]
根据相同的发明思路还可以得到以下技术方案:
[0015]
一种基于循环移频环的固态激光雷达探测系统,包括:
[0016]
扫频光源,用于生成窄带扫频光信号f
l_1
;
[0017]
循环移频环,用于生成包含n个扫频子带f
l_i
(i=1,2,
…
,n)的宽带扫频光信号;
[0018]
第一光耦合器,用于将循环移频环输出的宽带扫频光信号分为两路,一路作为参考光信号,一路作为探测光信号;
[0019]
第二光耦合器,用于将参考光信号与接收光信号合为一路得到待检测光信号;
[0020]
光环形器,1端口与第一光耦合器连接,用于接收探测光信号,2端口与准直镜连接,用于将探测光信号送入准直镜同时接收准直镜获得的接收光信号,3端口与第二耦合器连接,用于将接收光信号送到第二光耦合器;
[0021]
准直镜,用于将宽带扫频光信号发射到色散单元,并从色散单元接收目标回波信号获得接收光信号;
[0022]
色散单元,用于使宽带扫频光信号不同频率扫频子带信号在空间中分别指向不同方向,从不同方向接收目标回波信号;
[0023]
低频光电探测器,用于将待检测光信号光电转换为携带目标信息的中频电信号;
[0024]
信号采集与处理单元,用于对中频电信号进行模数转换,并进行固态激光雷达数字信号处理,提取出目标信息;
[0025]
同步控制单元,用于向扫频光源,循环移频环,信号采集与处理单元发送同步与控制信号。
[0026]
优选地,循环移频环包括:
[0027]
多个级联或单个双平行马赫-曾德尔调制器,用于对一系列扫频子带信号依次进行移频产生移频光信号;
[0028]
移频信号源,用于产生驱动多个级联或单个双平行马赫-曾德尔调制器输入信号移频的移频信号;
[0029]
光放大器,用于对移频光信号进行放大;
[0030]
光延时线,用于对放大后的移频光信号进行延时;
[0031]
光开关,用于控制循环移频环的通断状态;
[0032]2×
2光耦合器,第一输入端连接扫频光源,第二输入端连接光开关,第一输出端用于将产生的一系列扫频子带信号从循环移频环中输出,第二输出端连接双平行马赫-曾德尔调制器的输入端;
[0033]
光波束整形器,用于滤除循环移频环产生的宽带扫频光信号的带外噪声,并对宽带扫频光信号的频谱平坦度进行整形。
[0034]
进一步地,窄带扫频光信号由线性调频电信号通过电光调制器调制单频激光信号获得;所述电光调制器为马赫-曾德尔调制器、相位调制器、双平行马赫-曾德尔调制器、强度调制器;根据所采用电光调制器的种类,可在调制器后选择性级联光滤波器;通过选择高阶调制边带,窄带扫频光信带宽相对于线性调频电信号带宽可实现倍频。
[0035]
进一步地,窄带扫频光信号f
l_1
每隔nt时间开始输出信号,与所述光开关的开关周期nt同步。
[0036]
进一步地,色散单元为衍射光栅、棱镜、液晶。
[0037]
进一步地,还包括机械扫描装置,将二维空间信息与机械扫描装置扫描的信息结合,可以实现目标三维信息获取,其中机械扫描装置为微机电扫描镜、检流计扫描仪、多面镜扫描器、伺服电机。
[0038]
相比现有技术,本发明技术方案具有以下有益效果:
[0039]
1)本发明基于光循环移频技术实现宽带扫频信号的产生,宽带扫频信号继承了初始窄带扫频光信号的高线性度及长相干性。从而使激光雷达系统无需复杂的非线性反馈控制电路及非线性校正电路和算法,并可以提高激光雷达系统有效探测距离。
[0040]
2)本发明通过波长(频率)色散技术实现空间激光波束的一维扫描,单个色散单元即可实现激光频率-探测角度映射,并最终实现中频信号子周期-探测角度映射;方案结构简单,扫描速度快,可同时实现目标距离、角度二维信息的高精度快速获取。
[0041]
3)本发明通过移频信号源可控制扫频子带光信号的频率间隔,通过光纤延时可控制扫频子带信号的时间间隔,通过调节初始窄带扫频光信号的参数可控制扫频子带信号的带宽及信号持续时间,综合以上可以精确灵活调节激光雷达系统参数以适应不同探测场景/目标。
附图说明
[0042]
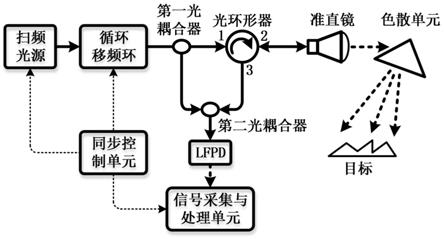
图1为本发明固态激光雷达系统原理示意图;
[0043]
图2为本发明固态激光雷达系统一个具体实施例的结构示意图;
[0044]
图3为图2所示固态激光雷达系统中循环移频环的结构示意图;
[0045]
图4为宽带扫频探测信号、宽带扫频接收信号、子带扫频信号通过色散单元的偏移角度、不同角度波束对不同距离目标的探测、中频电信号子周期信号分布等彼此之间的映射关系图;
具体实施方式
[0046]
针对现有技术不足,本发明基于光循环移频技术实现宽带固态激光雷达探测信号的产生,基于波长色散技术实现激光波束的扫描,基于光域去调频技术实现高分辨率目标距离信息的获取。系统产生线性扫频信号线性度高、相干性好,无需机械扫描即可同时实现角度、距离二维信息的获取,大大提高雷达系统的工作效率。
[0047]
本发明的一种基于循环移频环的固态激光雷达探测系统,如图1所示,包括扫频光源、循环移频环、第一光耦合器、第二光耦合器、光环形器、准直镜、色散单元、低频光电探测器(lfpd)、信号采集与处理单元、同步控制单元等。
[0048]
扫频光源产生窄带扫频光信号f
l_1
,将窄带扫频光信号f
l_1
送入循环移频环得到包含n个扫频子带f
l_i
(1,2,
…
,n)的宽带扫频光信号,第一光耦合器将宽带扫频光信号分为两路,其中一路作为参考光信号,而另一路经光环形器通入光准直镜并送入色散单元;色散单元控制宽带扫频光信号不同频率扫频子带信号在自由空间中依次指向不同方向,得到一系列指向不同方向的探测光信号;探测光信号遇到目标后反射回色散单元得到接收光信号,经光准直镜接收后与参考光信号在第二光耦合器中合为一路待检测光信号;待检测光信号由低频光电探测器完成光电转换,得到携带目标信息的中频电信号,对该中频电信号进行采集及信号处理即可同时得到目标的高精度二维空间分布信息。其中,同步控制单元控制扫频光源的输出周期、循环移频环的循环周期及信号采集与处理单元的周期一致。
[0049]
另外,所述二维空间分布信息结合机械扫描技术,可以实现目标三维信息获取;所述机械扫描技术为微机电扫描镜、检流计扫描仪、多面镜扫描器、伺服电机。
[0050]
为了便于公众理解,下面通过一个具体实施例来对本发明的技术方案进行进一步
详细说明:
[0051]
如图2所示,本实施例的固态激光雷达探测系统包括:1个线性调频信号源(lfm)、1个相位调制器(pm)、1个激光源(ld)、1个光带通滤波器(obpf)、1个循环移频环、2个光耦合器即第一光耦合器器和第二光耦合器、1个低频光电探测器(lfpd)、1个光环形器、1个准直镜、1个色散单元、1个信号采集与处理单元、1个同步控制单元。
[0052]
其中循环移频环结构示意图如图3所示,包括:2
×
2光耦合器、双平行马赫-曾德尔调制器、移频信号源(fs)、光放大器、光延时线、光开关与光波束整形器(ws)。
[0053]
需要说明的是,所述扫频光源可采用各种现有技术,优选地,本实施例选择线性调频信号外调制相位调制器方案,所述扫频光源由线性调频信号源、相位调制器、激光器及光滤波器组成。线性调频信号源输出瞬时频率为f
lfm
=f0+kt的电线性调频信号,并通过相位调制器调制载频为f
c
的连续波光信号,可得到包含光载频f
c
及多阶扫频边带f
c
±
jf
lfm
(j是扫频边带的阶数)的调制光信号,光带通滤波器滤出调制光信号其中一个扫频边带,以正二阶为例,则可得到窄带扫频光信号f
l_1
=f
c
+2f
lfm
,其时域表达式为:
[0054][0055]
其中a1为窄带扫频光信号f
l_1
的幅度,f0为电线性调频信号的起始频率,k为电线性调频信号的调频斜率,t1为电线性调频信号的时间宽度。将窄带扫频光信号送入循环移频环,通过2
×
2光耦合器的第一输入端口进入光耦合器,并分为两路,一路从2
×
2光耦合器的第一输出端输出,另一路从第二输出端进入循环移频环的环内。
[0056]
进入循环移频环环内的窄带扫频光信号送入双平行马赫-曾德尔调制器,频率为δf的移频信号对其实现抑制载波单边带调制,实现光域移频;移频后的窄带扫频光信号送入光放大器放大后,通过光延时线延时τ0,延时后的窄带扫频光信号通过闭合的光开关后送入2
×
2光耦合器的第二输入端,此时,窄带扫频光信号f
l_2
时域表达式为:
[0057][0058]
其中a2为窄带扫频光信号f
l_2
的幅度,t为循环移频环中各功能器件的延时总和,通过控制光延时线可以控制其大小,但需满足t1≤t,窄带扫频光信号f
l_2
同窄带扫频光信号f
l_1
一样分为两路,一路从2
×
2光耦合器的第一输出端输出,另一路从第二输出端进入循环移频环的环内。进入环内的窄带扫频光信号f
l_2
经历与窄带扫频光信号f
l_1
相同的环路,后续移频后的窄带扫频光信号同样经历相同的环路,直至第n个移频窄带扫频光信号通过光开关后,光开关断开,完成一次循环,得到宽带扫频光信号。宽带扫频光信号每个子周期内可以表示为:
[0059][0060]
其中a
i
为窄带扫频光信号f
l_i
的幅度,宽带扫频光信号的周期为nt。将宽带扫频光信号送入光波束整形器滤除带外噪声,并对其窄带扫频光信号幅度a
i
一致性整形后送入第一光耦合器。第一光耦合器将整形后的宽带扫频光信号分为两路,其中一路作为参考光信号,另一路作为探测光信号送入光环形器。光环形器将其送入光准直镜,光准直镜将宽带扫频光信号射向色散单元成为探测光信号。基于频率与角度存在与色散相关的映射关系,色
散单元控制不同频率的窄带扫频光信号依次射向方向θ
i
,因为窄带扫频信号频率随时间依次移频增加,所以角度θ
i
与周期时间t(i-1)+t1也存在映射关系。射向空间中的探测光信号遇到目标后发生反射,反射信号依次经色散单元送入光准直镜得到接收光信号,光准直镜将接收光信号通过光环形器送入第二光耦合器与参考光信号合为一路得到待检测光信号。设角度为θ
i
的探测光信号探测到目标,对应子周期的接收光信号与参考光信号延时差为τ
i
,则待检测光信号可以表示为:
[0061][0062]
其中a
ri
为接收光信号子带信号幅度,将待检测光信号送入低频光电探测器完成光电转换后即可得到与τ
i
相关的中频电信号,其表达式为:
[0063][0064]
其中a
rii
为中频电信号子周期的幅度,对此信号进行采集,并进行时间角度映射及距离维信息提取,即可得到高精度的目标二维分布信息。为便于理解,图4详细描绘了目标距离信息及角度信息的测量原理及宽带扫频探测信号频率-角度的映射关系。
[0065]
此外,所述二维空间信息结合机械扫描技术,可以实现目标三维信息获取;所述机械扫描技术为微机电扫描镜、检流计扫描仪、多面镜扫描器、伺服电机。
[0066]
最后,需要注意的是,以上列举的仅是本发明的具体实施例。本发明不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1