基于移动智能平台的电磁环境监测系统及方法与流程
[0001]
本发明涉及电网环保监测技术领域,具体地指一种基于移动智能平台的电磁环境监测系统及方法。
背景技术:
[0002]
随着社会经济发展和城市用电量的不断增加,变电站逐渐深入负荷较大的人口密集区,由于变电站是一个高压电器设备高度集中的场合,电磁环境和声环境是众多设备的一个综合表现。根据历年来对输变电工程电磁环境监测数据的统计,输变电工程电磁环境影响完全符合国家相关标准及规定。但由于输变电工程运行中产生的工频电场和磁场无法直观感受,无法消除公众的疑虑。
[0003]
目前,针对变电站现场的电磁环境监测主要采用人工测量的方式,即环保监测人员定期对不同的变电站敏感点及围墙周边进行测量。国内部分变电站安装了固定点式的电磁环境监测设备,但该方式仅能监测一个点的电磁环境实时情况,无法对变电站围墙内外的各类敏感点进行监测与分析。现有的传统的人工测量方式和固定点式测量方式都无法高效的对变电站整站进行实时监测、数据自动化管理与趋势分析。
技术实现要素:
[0004]
本发明的目的就是要提供一种基于移动智能平台的电磁环境监测系统及方法,本发明利用变电站机器人底盘、激光雷达、控制模块、高精度定位标签、控制计算机和三维电磁场监测模块,实现对变电站整站的关键测点的电磁环境智能化实时监测与分析,有效提高环保监测人员现场工作效率、可重复应用于各种变电站。
[0005]
为实现此目的,本发明所设计的基于移动智能平台的电磁环境监测系统,它包括监测车控制器、激光雷达、定位标签、三维工频电磁场监测器和计算机;
[0006]
所述激光雷达用于得到电磁环境被测区域的激光点云数据,并将电磁环境被测区域的激光点云数据传输给计算机,计算机用于根据电磁环境被测区域的激光点云数据生成电磁环境被测区域的地图、电磁环境被测区域的三维模型和当前激光雷达在地图中的坐标位置,并根据预设的监测位置在所述地图和三维模型上确定所需测量的点位坐标信息;
[0007]
所述定位标签置于所需测量的点位坐标信息对应的具体点位上,所述计算机用于将电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达在地图中的坐标位置和所需测量的点位坐标信息传输给监测车控制器,定位标签用于将所需测量的点位坐标射频信息传输给监测车控制器;
[0008]
所述监测车控制器用于根据电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达在地图中的坐标位置、所需测量的点位坐标信息和所需测量的点位坐标射频信息控制监测车运行到所需测量的点位;
[0009]
所述计算机还用于在监测车运行到达所需测量点位时,控制三维工频电磁场监测器进行三维电场和三维磁场的环境监测。
[0010]
本发明的有益效果:
[0011]
1、本发明通过设计上述由监测车控制器、激光雷达、定位标签、三维工频电磁场监测器和计算机组成的电磁环境监测系统,实现了对变电站整站的关键测点的电磁环境智能化实时监测与分析,有效提高环保监测人员现场工作效率、可重复应用于各种变电站。
[0012]
2、本发明为了保证基于移动智能平台测量定位的准确性,采用激光雷达的点云数据和无源rfid芯片(定位标签)双重校正定位,实现测量敏感点位的厘米级定位。
附图说明
[0013]
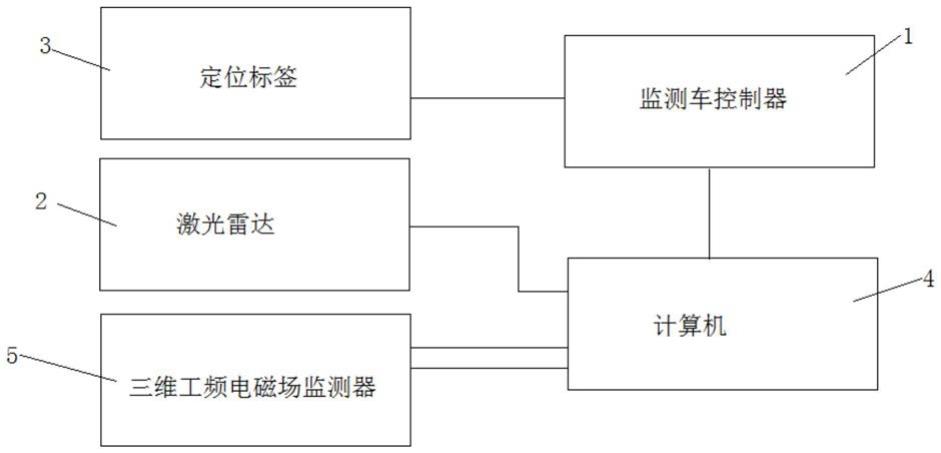
图1为本发明的逻辑框图;
[0014]
其中,1—监测车控制器、2—激光雷达、3—定位标签、4—计算机、5—三维工频电磁场监测器。
具体实施方式
[0015]
以下结合附图和具体实施例对本发明作进一步的详细说明:
[0016]
如图1所示的基于移动智能平台的电磁环境监测系统,它包括监测车控制器1、激光雷达2、定位标签3、三维工频电磁场监测器5和计算机4;
[0017]
激光雷达2的雷达信号输出端连接计算机4的雷达数据通信端口,定位标签3的定位信息输出端连接监测车控制器1的定位信息通信端,计算机4的导航环境信息通信端连接监测车控制器1的导航环境信息通信端,监测车控制器1的监测车到位信息通信端连接计算机4的监测车到位信息反馈通信端,计算机4的监测器控制信号通信端连接三维工频电磁场监测器5的控制端,三维工频电磁场监测器5的采样信号通信端连接计算机4的三维工频电磁场采样信号通信端,导航环境信息包括电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置和所需测量的点位坐标信息;
[0018]
所述激光雷达2用于得到电磁环境被测区域的激光点云数据,并将电磁环境被测区域的激光点云数据传输给计算机4,计算机4用于根据电磁环境被测区域的激光点云数据生成电磁环境被测区域的地图、电磁环境被测区域的三维模型和当前激光雷达2在地图中的坐标位置,并根据预设的监测位置在所述地图和三维模型上确定所需测量的点位坐标信息;
[0019]
所述定位标签3置于所需测量的点位坐标信息对应的具体点位上,所述计算机4用于将电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置和所需测量的点位坐标信息传输给监测车控制器1,定位标签3用于将所需测量的点位坐标射频信息传输给监测车控制器1;
[0020]
所述监测车控制器1用于根据电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置、所需测量的点位坐标信息和所需测量的点位坐标射频信息控制监测车运行到所需测量的点位;
[0021]
所述计算机4还用于在监测车运行到达所需测量点位时,控制三维工频电磁场监测器5进行三维电场和三维磁场的环境监测。
[0022]
上述技术方案中,所述三维工频电磁场监测器5通过支架安装在监测车上。所述支架为abs工程塑料支架,为了保证工频电场和工频磁场不受天气影响,利用abs工程塑料支
架作为支撑件,保证工频电场和磁场的测量准确性。abs工程塑料支架较传统的木质支架因高湿度天气条件下支架由绝缘特性吸水后变成导体影响测量值的缺点,应用abs工程塑料支架具有吸水率低、耐低温、耐磨性能优良、抗冲击性能好的特点,可将封装好的三维工频电磁场监测器5支撑于机器人底盘上。
[0023]
上述技术方案中,所述激光雷达2的雷达探头能分别面向监测车的前后左右四个方向。
[0024]
上述技术方案中,所述监测车控制器1用于根据电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置、所需测量的点位坐标信息和所需测量的点位坐标射频信息生成监测车运行到所需测量的点位的路径信息,监测车控制器1根据所述路径信息控制监测车运行到所需测量的点位。
[0025]
上述技术方案中,所述激光雷达2用于依据监测车前后左右四个方向的雷达扫描数据生成电磁环境被测区域的激光点云数据。
[0026]
上述技术方案中,所述计算机4用于根据电磁环境被测区域的激光点云数据进行三维还原建模,生成电磁环境被测区域的地图、电磁环境被测区域的三维模型和当前激光雷达2在地图中的坐标位置。
[0027]
上述技术方案中,所述三维工频电磁场监测器5用于将三维电场和三维磁场的环境监测结果和监测时间传输给计算机4进行存储。
[0028]
上述技术方案中,三维工频电磁场监测模块5由三维工频电场数据采集模块、三维工频磁场数据采集模块、数据通信模块和数据处理模块组成;
[0029]
三维工频电场数据采集模块通过三维电场传感器采集空间x、y、z(横向、纵向、竖向)三个方向的工频电场的信号,通过数据处理模块转换为三个方向的实时电场值。
[0030]
三维工频磁场数据采集模块通过三维磁场传感器采集空间x、y、z三个方向的工频磁场的信号,通过数据处理模块转换为三个方向的实时磁场值。
[0031]
数据处理模块将三维工频电场数据采集模块和三维工频磁场数据采集模块采集的模拟信号值转换成真有效值。
[0032]
数据通信模块为基于lora(long range radio,远距离无线电)的无线通信模块,可将三维工频电场和三维工频磁场的数据存储于计算机。
[0033]
上述技术方案中,所述定位标签3用于将所需测量的点位坐标射频信息输给计算机4进行存储。
[0034]
本发明中监测车可负重50kg,采用四驱轮式底盘,爬坡能力0~25
°
,内置24v锂聚合物电池。
[0035]
上述技术方案中,定位标签3为基于rfid(radio frequency identification,射频识别)的定位标签(定位标签3为无源rfid电子标签,定位精度可达
±
2cm),通过分析变电站的关键电磁环境监测敏感点位安装rfid定位标签,对测量的点位进行标记。通过与小型激光雷达获取的点云数据和rfid的标签数据结合,能对测量的变电站的点位信息进行高精度的定位和识别。
[0036]
为了保证基于移动智能平台测量定位的准确性,通过激光雷达2和定位标签3进行现场被测设备区域的双重定位校正,实现测量敏感点位的厘米级定位。
[0037]
一种基于上述系统的电磁环境监测方法,它包括如下步骤:
[0038]
步骤1:激光雷达2得到电磁环境被测区域的激光点云数据,并将电磁环境被测区域的激光点云数据传输给计算机4,计算机4根据电磁环境被测区域的激光点云数据生成电磁环境被测区域的地图、电磁环境被测区域的三维模型和当前激光雷达2在地图中的坐标位置,并根据预设的监测位置在所述地图和三维模型上确定所需测量的点位坐标信息;
[0039]
步骤2:将定位标签3置于所需测量的点位坐标信息对应的具体点位上,计算机4将电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置和所需测量的点位坐标信息传输给监测车控制器1,定位标签3将所需测量的点位坐标射频信息传输给监测车控制器1;
[0040]
步骤3:监测车控制器1根据电磁环境被测区域的地图、电磁环境被测区域的三维模型、当前激光雷达2在地图中的坐标位置、所需测量的点位坐标信息和所需测量的点位坐标射频信息控制监测车运行到所需测量的点位;
[0041]
步骤4:计算机4还在监测车运行到达所需测量点位时,控制三维工频电磁场监测器5进行三维电场和三维磁场的环境监测。
[0042]
上述技术方案中,当一个测点完成后,监测车控制器1控制监测车继续行驶至下个测点进行数据采集,直到完成电磁环境被测区域的整站点位采集和测量。
[0043]
本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1