一种基于时差测量的小型无人机信号定位系统及方法与流程
1.本发明属于电子信息技术技术领域,具体涉及一种基于时差测量的小型无人机信号定位系统及方法。
背景技术:
2.通过侦察小型无人机测控信号发现目标,是小型无人机防控的重要手段。由于无人机信号通信常采用扩频、跳频技术,当电磁环境较复杂时,现有电子侦察和测向手段面临着测控信号难以侦察发现的问题;并且受多径等影响,还存在测向精度差、定位准确性低的问题。
3.小型无人机资金门槛低、操作简便易学,无人机自身安全性能不完善,以及无人机操作人员的操作规范程度难以保证等,给无人机行业带来了巨大的监管难题。无人机非法进入敏感区域、“黑飞”扰乱民航秩序、无人机故障/坠落等事件屡见不鲜,引发了一系列的道德、法律、安全问题,无人机的监管问题亟待解决,而管制的前提是能够对无人机信号实现精确定位。
4.因此,亟需一种小型无人机信号定位系统及方法,实现对无人机信号实现精确定位。
技术实现要素:
5.本发明的目的在于:本发明提供一种基于时差测量的小型无人机信号定位系统及方法,通过基于分布式多站侦收、信号相关、时差测量的方式,实现对目标信号的准确定位。
6.本发明采用的技术方案:
7.一种基于时差测量的小型无人机信号定位系统,包括分布式基站型电子侦察设备组和定位处理设备,分布式基站型电子侦察设备组与定位处理设备通过网络连接;分布式基站型电子侦察设备组接收无人机的测控信号,并对接收的无人机测控信号提取到达时差;定位处理设备通过提取的到达时差完成定位处理和解算工作。
8.所述基站型电子侦察设备组包含2个电子侦察设备,分别为第一电子侦察设备和第二电子侦察设备,每个第一电子侦察设备和第二电子侦察设备分别包括接收机和cpu板。
9.同一个基站型电子侦察设备组内,所述两个电子侦察设备的接收机相同,cpu 板的组成不同。
10.所述接收机用于对接收信号进行接收、低噪声功率放大、滤波、a/d变换、数字下变频,将信号转换成零中频的时域iq数据。
11.所述第一电子侦察设备中,cpu板包含定位参数估计模块和传感器,传感器用于每个基站型电子侦察设备组内第一电子侦察设备和第二电子侦察设备实现精细同步,以及实现基站型电子侦察设备组之间的粗同步;定位参数估计模块根据第一电子侦察设备和第二电子侦察设备接收的同一时段的信号进行定位参数估计,获取到达时间差。
12.所述对于第二电子侦察设备,cpu板包含传感器,用于实现与第一电子侦察设备的
精细同步。
13.基于时差测量的小型无人机信号定位系统的定位方法,包括如下步骤:
14.步骤1、每个基站型电子侦察设备组分别侦收无人机测控信号
15.定位处理设备下发定位指令,其中包含目标信号频率、带宽、工作频段参数,每个基站型电子侦察设备组的两个电子侦察设备同时对目标无人机的测控信号进行接收、低噪声功率放大、滤波、a/d变换、数字下变频处理,转换成零中频的时域iq数据,每个基站型电子侦察设备组中,第二电子侦察设备将iq数据发送至第一电子侦察设备,第一电子侦察设备负责对接收的两组iq数据进行到达时差估算;
16.步骤2、每个基站型电子侦察设备组利用基于互模糊函数的时频差检测算法计算定位参数
17.每个基站型电子侦察设备组中,第一电子侦察设备为参考站,利用互模糊函数将接收到的两路信号进行时差和频差的二维匹配相关处理,搜索峰值所在位置得到tdoa和fdoa估计值,即到达时差和到达频差;
18.步骤3、每个基站型电子侦察设备组将测量时差发送至定位处理设备,定位处理设备构建tdoa定位方程组、求解方程,实现目标定位
19.定位处理设备首先利用每个基站型电子侦察设备组在同一时刻发送的到达时间差建立tdoa定位方程,每个基站型电子侦察设备组中,两个电子侦察设备的位置分别表示为s1=[x1,y1,z1]和s2=[x2,y2,z2],待估目标无人机的位置表示为u=[x,y,z],以上位置均采用地心直角坐标系,无人机信号到达两各电子侦察设备的距离差如下:
[0020][0021]
上式即为tdoa定位方程,i表示侦察组的编号,i=1,2,...,3,c为电磁波在介质中传播的速度,3个基站型电子侦察设备组的定位方程构成定位方程组,
[0022]
假设地球表面一点位置经度为l,纬度为b,高程为h,则在wgs
‑
84椭球模型下,该点的地心直角坐标和大地经纬高坐标的关系为
[0023][0024]
式中,e为椭球的第一偏心率,e2=(a2‑
b2)/a2;
[0025]
a为椭球的长半轴,6378.137km;b为椭球的短半轴6356.752314km;
[0026]
n为椭球的卯酉圈曲率半径,n=a/[1
‑
e2(sinb)2]
1/2
。
[0027]
将无人机的高度值合理估计为h^=300米;假设监测区域的纬度范围是[b1,b2],则监测区域的平均经纬度b^=(b1+b2)/2;利用式4将b^、h^转换为地心直角坐标系,将得到的值作为无人机z坐标的估计值,将时差定位方程组简化为二维方程组,最后求解方程,即可解算出目标位置u=[x,y,z]。
[0028]
所述步骤2中,具体的:
[0029]
设无人机测控信号为s(n),任一基站型电子侦察设备组中的第一电子侦察设备和第二电子侦察设备接收信号可表示为
[0030][0031]
式中,μ1和μ2表示信号到两个电子侦察设备的路径增益复系数;k和v分别表示两个电子侦察设备接收信号的时间延迟和多普勒频率差;n1(n)和n2(n)分别为两个电子侦察设备的观测噪声,将两个电子侦察设备接收信号的互模糊函数定义如下
[0032][0033]
式中,f
s
为采样率,n为采样点数
[0034]
a(k,v)达到峰值时,通过k和v可获得到达时间差和到达频率差,设总采样时长为t,则采样点数n=tf
s
,到达时间差τ=k/f
s
和到达频率差f=vf
s
。
[0035]
与现有技术相比,本发明的有益效果在于:
[0036]
(1)本发明提供一种基于时差测量的小型无人机信号定位系统及方法,通过利用分布式的基站型电子侦察设备侦收小型无人机测控信号,由网络连接至定位处理设备,定位处理设备综合采用基于互模糊函数的时频差检测与时差定位技术,集中完成定位处理和解算工作,提高小型无人机测控信号的检测能力、定位精度和准确度;
[0037]
(2)本发明提供一种基于时差测量的小型无人机信号定位系统及方法,定位参数提取技术采用互模糊函数(caf)法对接收信号进行tdoa和fdoa联合参数估计,可以获得精确度较高的到达时间差和到达频率差;
[0038]
(3)本发明提供一种基于时差测量的小型无人机信号定位系统及方法,利用分布式基站计算出的到达时间差,构建定位方程组并求解,从而实现目标定位;
[0039]
(4)本发明提供一种基于时差测量的小型无人机信号定位系统及方法,能够有效解决城市环境下信号定位面临的多径问题,并且能够连续定位,定位精度高,抗干扰能力强,非常适合用于对无人机的定位;
[0040]
(5)本发明提供一种基于时差测量的小型无人机信号定位系统及方法,可广泛用于无人机管制领域。
附图说明
[0041]
图1本发明提供的一种基于时差测量的小型无人机信号定位系统结构图;
[0042]
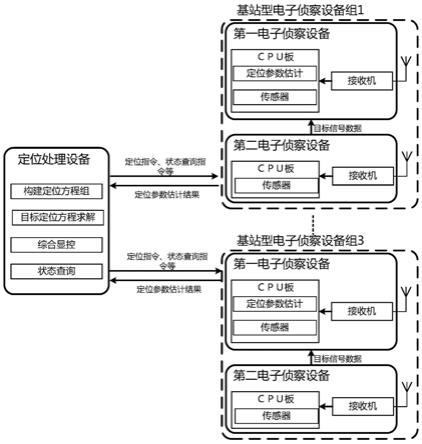
图2本发明提供的一种基于时差测量的小型无人机信号定位系统组成及工作原理框图;
[0043]
图3本发明提供的一种基于时差测量的小型无人机信号定位方法流程图;
[0044]
图中:1
‑
基站型电子侦察设备组、2
‑
定位处理设备、3
‑
无人机。
具体实施方式
[0045]
下面结合附图和具体实施例对本发明提供的一种基于时差测量的小型无人机信号定位系统及方法作进一步详细说明。
[0046]
如图1所示,本发明提供的一种基于时差测量的小型无人机信号定位系统,包括分布式基站型电子侦察设备组1和定位处理设备2,分布式基站型电子侦察设备组1与定位处
理设备2通过网络连接;分布式基站型电子侦察设备组1接收无人机3的测控信号,并对接收的无人机测控信号通过“基于互模糊函数的时频差检测”技术提取到达时差;定位处理设备通过时差定位技术完成定位处理和解算工作。
[0047]
作为具体实施例,如图2所示,本发明提供的一种基于时差测量的小型无人机信号定位系统,分布式基站包含3个基站型电子侦察设备组,每个基站型电子侦察设备组包含2个电子侦察设备,分别为第一电子侦察设备和第二电子侦察设备,每个第一电子侦察设备和第二电子侦察设备分别包括接收机和cpu板,同一个基站型电子侦察设备组内,两个电子侦察设备的接收机相同,cpu板的组成略有不同,其中:
[0048]
接收机用于对接收信号进行接收、低噪声功率放大、滤波、a/d变换、数字下变频等处理,将信号转换成零中频的时域iq数据。
[0049]
对于第一电子侦察设备,cpu板主要包含定位参数估计模块和传感器,传感器用于每个基站型电子侦察设备组内第一电子侦察设备和第二电子侦察设备实现精细同步,以及实现基站型电子侦察设备组之间的粗同步;定位参数估计模块根据第一电子侦察设备和第二电子侦察设备接收的同一时段的信号进行定位参数估计,获取到达时间差;对于第二电子侦察设备,cpu板主要包含传感器,用于实现与第一电子侦察设备的精细同步。
[0050]
定位处理设备2负责查询每个基站型电子侦察设备组1的设备状态,控制每个基站型电子侦察设备组1对目标无人机3测控信号进行侦收和定位参数提取,根据定位参数估计结果联立方程组、求解方程,获取并显示目标位置;操作员可在定位处理设备2的显控软件中输入目标无人机测控信号的频率、带宽、工作频段等信息。
[0051]
如图3所示,本发明提供的一种基于时差测量的小型无人机信号定位方法,首先由每个基站型电子侦察设备组1对接收的无人机3的测控信号进行tdoa和fdoa联合参数估计;其后,定位处理设备2根据时差测量结果构建tdoa定位方程组,求解后计算得出目标位置。定位流程具体如下:
[0052]
步骤1、每个基站型电子侦察设备组1分别侦收无人机测控信号。
[0053]
如图2所示,首先由定位处理设备2下发定位指令,其中包含目标信号频率、带宽、工作频段参数。每个基站型电子侦察设备组1的两个电子侦察设备同时对目标无人机3的测控信号进行接收、低噪声功率放大、滤波、a/d变换、数字下变频等处理,转换成零中频的时域iq数据。每个基站型电子侦察设备组1中,第二电子侦察设备将iq数据发送至第一电子侦察设备1,第一电子侦察设备负责对接收的两组iq数据进行到达时差估算。
[0054]
步骤2、每个基站型电子侦察设备组1利用基于互模糊函数的时频差检测算法计算定位参数。
[0055]
每个基站型电子侦察设备组1中,第一电子侦察设备为参考站,利用互模糊函数(caf)将接收到的两路信号进行时差和频差的二维匹配相关处理,搜索峰值所在位置得到tdoa和fdoa估计值,即到达时差和到达频差。
[0056]
设无人机3测控信号为s(n),任一基站型电子侦察设备组1中的第一电子侦察设备和第二电子侦察设备接收信号可表示为
[0057][0058]
式中,μ1和μ2表示信号到两个电子侦察设备的路径增益复系数;k和v分别表示两个
电子侦察设备接收信号的时间延迟和多普勒频率差;n1(n)和n2(n)分别为两个电子侦察设备的观测噪声。将两个电子侦察设备接收信号的互模糊函数(caf)定义如下
[0059][0060]
式中,f
s
为采样率,n为采样点数。
[0061]
a(k,v)达到峰值时,通过k和v可获得到达时间差和到达频率差。设总采样时长为t,则采样点数n=tf
s
,到达时间差τ=k/f
s
和到达频率差f=vf
s
。
[0062]
步骤3、每个基站型电子侦察设备组1将测量时差发送至定位处理设备2,定位处理设备2构建tdoa定位方程组、求解方程,实现目标定位。
[0063]
定位处理设备2首先利用每个基站型电子侦察设备组1在同一时刻发送的到达时间差建立tdoa定位方程。每个基站型电子侦察设备组1中,两个电子侦察设备的位置分别表示为s1=[x1,y1,z1]和s2=[x2,y2,z2],待估目标无人机的位置表示为 u=[x,y,z],以上位置均采用地心直角坐标系。无人机信号到达两各电子侦察设备的距离差如下:
[0064][0065]
上式即为tdoa定位方程,i表示侦察组的编号,i=1,2,...,3,c为电磁波在介质中传播的速度,3个基站型电子侦察设备组1的定位方程构成定位方程组。
[0066]
假设地球表面一点位置经度为l,纬度为b,高程为h,则在wgs
‑
84椭球模型下,该点的地心直角坐标和大地经纬高坐标的关系为
[0067][0068]
式中,e为椭球的第一偏心率,e2=(a2‑
b2)/a2;
[0069]
a为椭球的长半轴,6378.137km;b为椭球的短半轴6356.752314km;
[0070]
n为椭球的卯酉圈曲率半径,n=a/[1
‑
e2(sinb)2]
1/2
。
[0071]
目前市场上民用轻型无人机最高飞行高度在500米以下,所以将无人机的高度值合理估计为h^=300米。假设监测区域的纬度范围是[b1,b2],则监测区域的平均经纬度b^=(b1+b2)/2。利用式4将b^、h^转换为地心直角坐标系,将得到的值作为无人机z坐标的估计值,将时差定位方程组简化为二维方程组,最后求解方程,即可解算出目标位置u=[x,y,z]。
[0072]
本发明提供的一种基于时差测量的小型无人机信号定位系统及方法,可持续对无人机测控信号进行接收、定位参数提取、定位方程构建和解算,在保证高定位精度的前提下,可实现连续定位。
[0073]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应该涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1