一种微小振动视觉测量方法及系统与流程
[0001]
本发明涉及视觉测量技术领域,尤其涉及一种微小振动视觉测量方法及系统。
背景技术:
[0002]
振动广泛存在于机械、车辆、建筑、航空航天等各类工程应用中。工程结构和设备在运行过程中产生大量振动信号,其中蕴含着丰富的结构内在特性和设备运行状况信息,是反映系统状态及其变化规律的重要信息表征,直接影响着工程结构和设备的安全运行。
[0003]
从现有的振动测量技术来看,有两种测量方法:一种是接触式测量,另一种是非接触测量。接触式测量需要将传感器按一定的规则布置在测量对象之上,并连接上配套的上位机软件。然而,接触测量会产生质量负载效应,在不提供全场空间分辨率的情况下,只能测量单个点位置的相应信号。此外,对于一些大型结构,处理所有的布线和仪表费时且耗费人力。非接触测量通常依靠某种电磁辐射来传输信息,该方法与传统的接触测量方法不同,可以在不改变现有设备配置和安装的情况下获得不同的尺寸信息。例如, 用于振动测量的激光测振仪,不需要安装在结构上的传感器和任何质量荷载效应。然而,激光测振仪相对来说比较昂贵,对大的低频振动处理效率也较低。
[0004]
数字相机结合图像处理算法是另一种非接触测量方法,又称基于视觉的振动测量。相较于激光振动仪,数字相机具有低成本、适用于全场测量的优点。视觉测量作为一种新型的测量技术,它可以在不接触被测物体的情况下,完成对目标位置、尺寸、形状、方位和目标间相互关系参数的测量,不受电磁场干扰,具有高精度、高灵敏度、远距离遥测、表面无损伤等优点。然而现有技术中的基于模板匹配的视觉测量手段虽然可以顺利完成振动视频的位移提取与振动分析,但是算法的计算量较大,受环境的影响较大,准确率不能保证,测量时还需要在待测物体表面张贴人工标靶,测量过程复杂。视频放大方法主要用于将原本难以识别的微小振动进行有选择性地放大,使微小振动可以无需额外的人工标靶,即可通过图像识别算法进行识别。比如,三维数字图像相关(dic)和基于光照强度的光流法等常用于大振幅振动的测量,而转子振动属于亚像素级别微小振动,难以与噪声区分开,且用三维数字图像相关(dic)和基于光照强度的光流法测得的精度较低。现有的视频放大方法主要分为两类,即拉格朗日视角视频放大方法和欧拉视角视频放大方法。拉格朗日视频放大方法首先选取特征点用于运动追踪,然后记录运动过程中物体的坐标位置、得到运动向量,最后通过放大运动向量实现微小振动可视化。这种方法虽然能够产生良好的视频放大效果,但是计算量大;另外输出视频的清晰度受运动追踪算法精度影响严重,即算法的误差在放大之后将产生运动伪影,影响视频放大结果。因此,如何高精度的提取转子振动信号是研究的重点和难点。
[0005]
专利cn108830233a该专利的特征增强算法基于欧拉视频算法,在增强振动特征时,会连同噪音信号一同增强,使得画面过度模糊与扭曲。专利cn110084127a该专利聚焦于磁悬浮转子振动这一具体应用的特征识别与增强,不能推广至更普遍振动特征识别场景,如工业用的电机、水泵、风机塔筒等。专利cn111277833a该专利需要在视频中人工框选包含
振动目标边缘的roi区域,然后再此被标记的区域中进行振动放大等操作,无法根据算法自动识别出发生振动的区域并操作。专利cn110553714a该专利采用主成分分解法作为降维处理方法,需要对图像信息的变化特征进行预设,且预设的特征为由振动引起的亮度变化,无法处理通用的特征变化。
技术实现要素:
[0006]
鉴于此,本发明提供一种微小振动视觉测量方法及系统,能够对设备的振动视频流的微小振动进行放大,获得更加清晰的视频增强效果。
[0007]
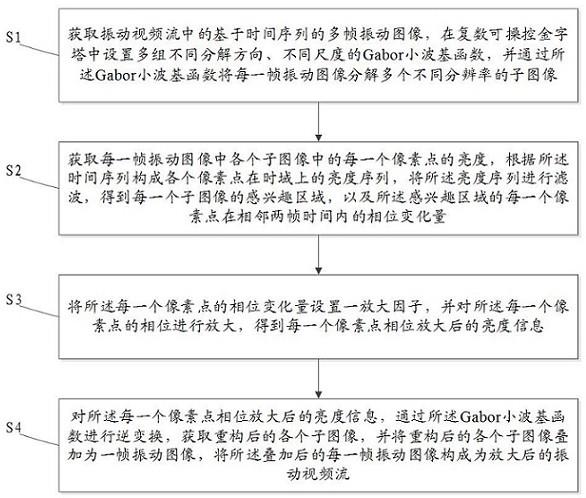
为实现上述目的,本发明提供一种微小振动视觉测量方法,所述方法包括:s1、获取振动视频流中的基于时间序列的多帧振动图像,在复数可操控金字塔中设置多组不同分解方向、不同尺度的gabor小波基函数,并通过所述gabor小波基函数将每一帧振动图像分解多个不同分辨率的子图像;s2、获取每一帧振动图像中各个子图像中的每一个像素点的亮度,根据所述时间序列构成各个像素点在时域上的亮度序列,将所述亮度序列进行滤波,得到每一个子图像的感兴趣区域,以及所述感兴趣区域的每一个像素点在相邻两帧时间内的相位变化量;s3、将所述每一个像素点的相位变化量设置一放大因子,并对所述每一个像素点的相位进行放大,得到每一个像素点相位放大后的亮度信息;s4、对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像,将所述叠加后的每一帧振动图像构成为放大后的振动视频流。
[0008]
优选的,所述步骤s1包括:获取每一帧振动图像中的每一个像素点的像素信息,所述像素信息包括亮度和位置矢量;对每一帧振动图像中的所有像素信息进行傅里叶变换,得到每一帧振动图像所对应的频域信息,所述频域信息包括相位、幅度和角频率。
[0009]
优选的,所述步骤s1包括:在复数可操控金字塔中设置多组不同分解方向θ、不同尺度gabor小波基函数,并设置gabor滤波器的波长小于每一帧振动图像尺寸的1/5,构建标准差σ公式(1);(1);其中,λ表示滤波器的波长,单位为像素,b为带宽值,通常设为1;将每一帧振动图像所对应的频域信息分别与所述不同分解方向、不同尺度gabor小波基函数相乘进行滤波,获得每一帧振动图像在复数可操控金字塔分解下的多个不同分辨率的子图像。
[0010]
优选的,所述步骤s2包括:将所述亮度序列通过一带通滤波器进行滤波,所述带通滤波器的带宽基于设备运行振动频率设置。
[0011]
优选的,所述步骤s2包括:
对所述亮度序列进行频域变换,将每一个像素点的亮度信息与所述gabor小波基函数相乘,得到每一个像素点的各个角频率下的复数频率幅值;将所述每一个角频率的复数频率幅值分别通过奇偶滤波窗,分解成每一个角频率的复数频率幅值的实部和虚部,并获取每一个角频率所对应的相位,所述相位是通过虚部比实部的反正切计算得到。
[0012]
优选的,所述步骤s2还包括:根据所述每一个角频率所对应的相位,获取所述感兴趣区域的每一个像素点在相邻两帧时间内各个角频率下的相位变化量,所述相位变化量用ωδ(t)来表示,δ(t)为相邻两帧时间内的位移变化函数,ω为角频率。
[0013]
优选的,所述步骤s3包括:将所述相位变化量ωδ(t)增加放大因子α倍,获取放大后的感兴趣区域的像素点在x位置矢量上的亮度在角频率下ω的幅值分量;对所述角频率ω下的幅值分量进行傅里叶逆变换,并经过所述gabor小波基函数进行逆变换,得到每一个像素点相位放大后的亮度信息。
[0014]
优选的,所述放大因子α满足αδ(t) <λ/4,λ表示gabor滤波器的波长。
[0015]
优选的,所述步骤s4包括:将每一帧振动图像中各个子图像中的同一个像素点相位放大后的亮度进行叠加并与相应的gabor小波基函数进行相乘,获取重构后的每一帧振动图像,将每一帧振动图像合成为振动视频流。
[0016]
为实现上述目的,本发明提供一种微小振动视觉测量系统,所述系统包括:图像分解模块,用于获取振动视频流中的基于时间序列的多帧振动图像,在复数可操控金字塔中设置多组不同分解方向、不同尺度的gabor小波基函数,并通过所述gabor小波基函数将每一帧振动图像分解多个不同分辨率的子图像;相位变化模块,用于获取每一帧振动图像中各个子图像中的每一个像素点的亮度,根据所述时间序列构成各个像素点在时域上的亮度序列,将所述亮度序列进行滤波,得到每一个子图像的感兴趣区域,以及所述感兴趣区域的每一个像素点在相邻两帧时间内的相位变化量;相位放大模块,用于将所述每一个像素点的相位变化量设置一放大因子,并对所述每一个像素点的相位进行放大,得到每一个像素点相位放大后的亮度信息;重构模块,用于对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像,将所述叠加后的每一帧振动图像构成为放大后的振动视频流。
[0017]
与现有技术相比,本发明提供的一种微小振动视觉测量方法及系统,所带来的有益效果为:将局部相位特征强化结合基于优化的gabor小波时间滤波和空间滤波,实现在任意指定频率范围内的视频特征强化;对局部相位优化后发生平移的噪声信号应有幅度加权的空间平滑以及增加相位放大因子的约束提交来增强相位的信噪比,获得更加清晰的视频增强效果;通过将计算负担复配在边缘处理器和显示终端两个部件,实现实时视频增强输出;可以对视频放到系数进行实时调控,并获得实时反馈;能够对设备微小振动进行无接触测量,不对设备产生接触损坏影响,灵敏度高、计算速率快,可视化效果强,节约监测成本。
附图说明
[0018]
图1是根据本发明的一个实施例的微小振动视觉测量方法的流程示意图。
[0019]
图2是根据本发明的一具体实施例的振动信号放大前后的示意图。
[0020]
图3是根据本发明的一个实施例的微小振动视觉测量系统的系统示意图。
具体实施方式
[0021]
以下将结合附图所示的具体实施方式对本发明进行详细描述,但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0022]
如图1所示的本发明的一个实施例,本发明提供一种微小振动视觉测量方法,所述方法包括:s1、获取振动视频流中的基于时间序列的多帧振动图像,在复数可操控金字塔中设置多组不同分解方向、不同尺度的gabor小波基函数,并通过所述gabor小波基函数将每一帧振动图像分解多个不同分辨率的子图像;s2、获取每一帧振动图像中各个子图像中的每一个像素点的亮度,根据所述时间序列构成各个像素点在时域上的亮度序列,将所述亮度序列进行滤波,得到每一个子图像的感兴趣区域,以及所述感兴趣区域的每一个像素点在相邻两帧时间内的相位变化量;s3、将所述每一个像素点的相位变化量设置一放大因子,并对所述每一个像素点的相位进行放大,得到每一个像素点相位放大后的亮度信息;s4、对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像,将所述叠加后的每一帧振动图像构成为放大后的振动视频流。
[0023]
获取振动视频流中的基于时间序列的多帧振动图像,在复数可操控金字塔中设置多组不同方向、不同尺度的gabor小波基函数,并通过所述gabor小波基函数对每一帧振动图像分解多个不同分辨率的子图像。通过高速摄像机对运行的设备振动进行拍摄,比如塔筒,采集并获取振动视频流,所述视频流包括基于时间序列的多帧振动图像。获取每一帧振动图像中的每一个像素点的像素信息,所述像素信息包括亮度和位置矢量,对每一帧振动图像中的所有像素信息进行傅里叶变换,得到每一帧振动图像所对应的频域信息,所述频域信息包括相位、幅度和角频率。离散傅里叶变换后获取包含一系列离散的信号,每个离散信号包含了相位和幅度信息。
[0024]
采用gabor滤波器仅针对傅里叶变换结果中指定的频率部分和超过强度阈值的部分进行操作。gabor滤波器设置的关键参数标准差直接影响分解的性能,由于监测设备的振动图像的局部频率决定了滤波器的带宽,基于滤波区域图像信噪比最大化,通过仿真实验得出如下经验公式进行设置滤波器的标准差。通过该滤波器实现对图像的去噪功能。在复数可操控金字塔中设置多组不同分解方向θ、不同尺度gabor小波基函数,设置gabor滤波器的波长小于每一帧振动图像尺寸的1/5,构建标准差σ公式为式(1):(1);
其中,λ表示滤波器的波长,单位为像素,b为带宽值,通常设为1。带宽越小,标准差越大,gabor形状越大,可见的抑制和增强区域将越大;gabor小波基函数ψ(x,θ,ω,σ)为: (2);(3);其中,x为图像中某一像素点的位置矢量,ω为角频率,θ为分解方向。
[0025]
每一帧振动图像所对应的频域信息分别与所述不同分解方向、不同尺度gabor小波基函数相乘进行滤波,获得每一帧振动图像在复数可操控金字塔分解下的多个不同分辨率的子图像。
[0026]
获取每一帧振动图像中各个子图像中的每一个像素点的亮度,根据所述时间序列构成各个像素点在时域上的亮度序列,将所述亮度序列进行滤波,得到每一个子图像的感兴趣区域,以及所述感兴趣区域的每一个像素点在相邻两帧振动图像中的相位变化量。基于步骤s1中,通过gabor滤波器对图像进行去噪处理,因此本步骤中的图像经过滤波处理的。获取每一帧振动图像中各个子图像中的每一个像素点的亮度,每帧振动图像之间具有时间序列关系,该像素点的亮度值在所述振动图像之间也具有相同的时间序列关系,因此具有时间序列关系的像素点的亮度值就可以构成时域上的信息。将所述亮度序列通过一带通滤波器进行滤波,所述带通滤波器的带宽基于设备运行振动频率设置,通过该滤波器将图像中的非感性区域过滤,保留感兴趣区域。
[0027]
所述感兴趣区域的每一个像素点在相邻两帧振动图像中的相位变化量。具体地,对所述亮度序列进行频域变换,将每一个像素点的亮度信息与所述gabor小波基函数ψ(x,θ,ω,σ)相乘,得到每一个像素点的各个角频率下的复数频率幅值。
[0028]
具体通过公式(4)和(5)计算得到;(4); (5);其中,为每一个像素点的亮度信息。
[0029]
将所述每一个角频率的复数频率幅值分别通过奇偶滤波窗,分解成每一个角频率的复数频率幅值的实部和虚部,并获取每一个角频率所对应的相位。具体地,通过公式(6)和(7),将复数频率幅值分解成偶信号和奇信号的叠加,通过偶滤波窗会消除奇信号,只保留偶信号,通过奇滤波窗会消除偶信号,只保留奇信号。图像原始信号在空间域是实信号,导致其转换后的频域信号为复信号,且实部偶对称,虚部奇对称。空间每个点就可以用复数形式表示,所述相位φ是通过虚部比实部的反正切通过公式(5)和(6)计算
得到。
[0030]
(6); (7);其中,x为图像中某一像素点的位置矢量,a
ω
(x)为实部,b
ω
(x)为虚部。
[0031]
根据所述每一个角频率所对应的相位,获取所述感兴趣区域的每一个像素点在相邻两帧时间内各个角频率下的相位变化量。所述相位变化量用ωδ(t)来表示,δ(t)为相邻两帧时间内的位移变化函数。
[0032]
将所述每一个像素点的相位变化量设置一放大因子,并对所述每一个像素点的相位进行放大,得到每一个像素点相位放大后的亮度信息。具体地,将所述相位变化量用ωδ(t)增加α倍,则放大后的感兴趣区域的像素点在x位置矢量上的亮度在角频率ω下的幅值分量为: (8);其中,为原始感兴趣区域的像素点在x位置矢量上的亮度在角频率ω下的幅值分量,α为放大因子,δ(t)为位移变化函数,a为幅值。为了避免图像因相位放大偏离真实的信号产生伪影,对放大因子α进行约束,基于仿真实验结果,放大因子α满足αδ(t) <λ/4时,λ表示gabor滤波器的波长,能够获得理想的放大效果。实际应用时,图像信息会包含噪声信息,经过该实施例的相位放大方案,经过相位放大处理后,噪音信号仅仅发生了相位变换,并没有被一并增强。对所述角频率ω下的幅值分量进行傅里叶逆变换,并经过所述gabor小波基函数进行逆变换,得到每一个像素点相位放大后的亮度信息。
[0033]
对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像。将每一帧振动图像中各个子图像中的同一个像素点相位放大后的亮度进行叠加并与相应的gabor小波基函数进行相乘,获取重构后的每一帧振动图像,将每一帧振动图像合成为振动视频流,在显示终端进行显示。重构后的振动图像对微小振动信号进行放大。如图2所示,图左为原始的振动视频。图右为相位增大后的振动视频,从图中可以明显看出经过本发明的技术方案处理之后,能够看出图像中的微小振动变化。
[0034]
如图3所示,本发明提供一种微小振动视觉测量系统,所述系统包括:图像分解模块30,用于获取振动视频流中的基于时间序列的多帧振动图像,在复数可操控金字塔中设置多组不同分解方向、不同尺度的gabor小波基函数,并通过所述gabor小波基函数将每一帧振动图像分解多个不同分辨率的子图像;相位变化模块31,用于获取每一帧振动图像中各个子图像中的每一个像素点的亮度,根据所述时间序列构成各个像素点在时域上的亮度序列,将所述亮度序列进行滤波,得到每一个子图像的感兴趣区域,以及所述感兴趣区域的每一个像素点在相邻两帧时间内的相位变化量;相位放大模块32,用于将所述每一个像素点的相位变化量设置一放大因子,并对所述
每一个像素点的相位进行放大,得到每一个像素点相位放大后的亮度信息;重构模块33,用于对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像,将所述叠加后的每一帧振动图像构成为放大后的振动视频流。
[0035]
图像分解模块采集并获取振动视频流,所述视频流包括基于时间序列的多帧振动图像,对每一帧振动图像中的所有像素信息进行傅里叶变换,得到每一帧振动图像所对应的频域信息,所述频域信息包括相位、幅度和角频率;在复数可操控金字塔中设置多组不同分解方向、不同尺度gabor小波基函数, 每一帧振动图像所对应的频域信息分别与所述不同分解方向、不同尺度gabor小波基函数相乘进行滤波,获得每一帧振动图像在复数可操控金字塔分解下的多个不同分辨率的子图像。
[0036]
相位变化模块获取每一帧振动图像中各个子图像中的每一个像素点的亮度,将所述亮度序列通过一带通滤波器进行滤波,对所述亮度序列进行频域变换,将每一个像素点的亮度信息与所述gabor小波基函数相乘,得到每一个像素点的各个角频率下的复数频率幅值,将所述每一个角频率的复数频率幅值分别通过奇偶滤波窗,分解成每一个角频率的复数频率幅值的实部和虚部,并获取每一个角频率所对应的相位。根据所述每一个角频率所对应的相位,对所有角频率所对应的各个相位求和,得到每一个像素点所对应的相位,获取所述感兴趣区域的每一个像素点在相邻两帧时间内各个角频率下的相位变化量。
[0037]
相位放大模块将相位变化量用ωδ(t)增加α倍,得到放大后的感兴趣区域的像素点在x位置矢量上的亮度在角频率ω下的幅值分量,对所述角频率ω下的幅值分量进行傅里叶逆变换,并经过所述gabor小波基函数进行逆变换,得到每一个像素点相位放大后的亮度信息。
[0038]
重构模块对所述每一个像素点相位放大后的亮度信息,通过所述gabor小波基函数进行逆变换,获取重构后的各个子图像,并将重构后的各个子图像叠加为一帧振动图像。
[0039]
尽管为示例目的,已经公开了本发明的优选实施方式,但是本领域的普通技术人员将意识到,在不脱离由所附的权利要求书公开的本发明的范围和精神的情况下,各种改进、增加以及取代是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1