一种基于楔形结构的磁流变压力传感装置的制作方法
[0001]
本发明涉及一种压力传感装置,尤其涉及一种基于楔形结构的磁流变压力传感装置。
背景技术:
[0002]
随着水下探测技术的发展,水下压力传感装置被广泛应用于潜艇和水下机器人中。但随着水下探测深度越来越深,海底水压已经超出普通压力传感器的测量范围,迫切需要一种能测量范围更广的水下压力传感装置。因此,本发明结合磁流变弹性体的磁控刚度可变和压阻特性设计了一种基于楔形结构的磁流变压力传感装置
技术实现要素:
[0003]
本发明的目的在于提供一种基于楔形结构的磁流变压力传感装置,不仅能够测量海底的压力,还能测量海水压力的变化过程。
[0004]
为了能有效地解决上述问题,本发明按如下方式来实现:该装置由外壳1、楔形锥2、活塞杆3、一号极板4、二号极板5、三号极板6、四号极板7、五号极板8、六号极板9、端盖10、一号弹簧11、控制器外壳12、控制器13、二号弹簧14、通电导线15、信号线16、三号弹性体17、二号弹性体18、一号弹性体19、励磁线圈20、密封圈21组成。所述楔形锥2放置在外壳1的内部中心处,并用密封圈21进行密封;所述活塞杆3水平放置于外壳1内部,并紧贴楔形锥2;所述一号极板4、三号极板6、五号极板8 紧贴在活塞杆3侧面上;所述二号极板5、四号极板7、六号极板9嵌于外壳1内,且置于活塞杆3侧面;所述一号弹性体19、二号弹性体18、三号弹性体17分别放置于活塞杆3凹陷处;所述端盖10与外壳1 进行螺纹连接;所述一号弹簧11放置在端盖10与活塞杆3之间;所述控制器外壳12放置在外壳1底部,并与外壳1进行焊接;所述控制器13放置于控制器外壳12内,其输出端连接有信号线16和通电导线15;所述二号弹簧14放置在楔形锥2底部;所述励磁线圈20缠绕在活塞杆3内部。
[0005]
所述的外壳1内部和表面均做绝缘处理。
[0006]
所述的一号极板4、二号极板5、三号极板6、四号极板7、五号极板8、六号极板9的材质均用铜。
[0007]
所述的一号弹性体19、二号弹性体18、三号弹性体17均为预结构化磁流变弹性体。
[0008]
所述的活塞杆3表面做绝缘处理。
[0009]
本发明所述的一种基于楔形结构的磁流变压力传感装置的积极效果在于:通过测量预结构化磁流变弹性体的压阻值来表征压力,并取测量的压阻平均值,使测得的数据更加准确;由于存在四个测量方位,海水压力被平分为四处,可增大其压力表征范围,因此能够测量更深处的海水压力。
附图说明
[0010]
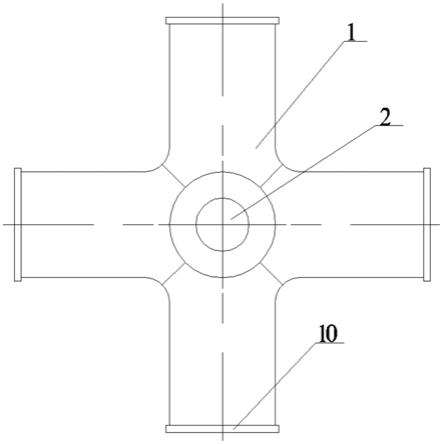
图1为一种基于楔形结构的磁流变压力传感装置的俯视图。
[0011]
图2为一种基于楔形结构的磁流变压力传感装置的内部结构示意图。
[0012]
图中:1.外壳、2.楔形锥、3.活塞杆、4.一号极板、5.二号极板、6.三号极板、7.四号极板、8.五号极板、 9.六号极板、10.端盖、11.一号弹簧、12.控制器外壳、13.控制器、14.二号弹簧、15.通电导线、16.信号线、 17.三号弹性体、18.二号弹性体、19.一号弹性体、20.励磁线圈、21.密封圈。
具体实施方式
[0013]
下面结合附图对本发明进行详细说明。
[0014]
在图2中,本发明一种基于楔形结构的磁流变压力传感装置由外壳1、楔形锥2、活塞杆3、一号极板 4、二号极板5、三号极板6、四号极板7、五号极板8、六号极板9、端盖10、一号弹簧11、控制器外壳 12、控制器13、二号弹簧14、通电导线15、信号线16、三号弹性体17、二号弹性体18、一号弹性体19、励磁线圈20、密封圈21组成。所述楔形锥2放置在外壳1的内部中心处,并用密封圈21进行密封;所述活塞杆3水平放置于外壳1内部,并紧贴楔形锥2;所述一号极板4、三号极板6、五号极板8紧贴在活塞杆3侧面上;所述二号极板5、四号极板7、六号极板9嵌于外壳1内,且置于活塞杆3侧面;所述一号弹性体19、二号弹性体18、三号弹性体17分别放置于活塞杆3凹陷处;所述端盖10与外壳1进行螺纹连接;所述一号弹簧11放置在端盖10与活塞杆3之间;所述控制器外壳12放置在外壳1底部,并与外壳1进行焊接;所述控制器13放置于控制器外壳12内,其输出端连接有信号线16和通电导线15;所述二号弹簧14放置在楔形锥2底部;所述励磁线圈20缠绕在活塞杆3内部。
[0015]
所述的外壳1内部和表面均做绝缘处理。
[0016]
所述的一号极板4、二号极板5、三号极板6、四号极板7、五号极板8、六号极板9的材质均用铜。
[0017]
所述的一号弹性体19、二号弹性体18、三号弹性体17均为预结构化磁流变弹性体。
[0018]
所述的活塞杆3表面做绝缘处理。
[0019]
本发明一种基于楔形结构的磁流变压力传感装置的工作原理为:海水由外壳1顶部进入时,楔形锥2 受压强的原因向下移动,挤压四周的活塞杆3向水平方向移动,此时控制器13输出电流给通电导线15,与通电导线15相连接的励磁线圈20产生磁场,磁场发生变化,引起一号弹性体19、二号弹性体18和三号弹性体17的刚度发生变化,以此来平衡海水的压力。通过信号线16测量单一方向上的一号极板4与二号极板5,三号极板6与四号极板7,五号极板8与六号极板9之间的压阻均值,在结合另外三个方面的压阻均值,取四个方向的压阻均值,最终标定海水压力大小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1