冰刀检测装置的制作方法
1.本实用新型涉及刀具检测技术领域,具体地,涉及一种冰刀检测装置,尤其是一种用于冰刀表面粗糙度和轮廓精度检测的自动化设备。
背景技术:
2.冰刀是装在冰鞋底下的钢制刀状物,冰刀刀刃很薄,即使是刀刃最长的速滑刀其与冰面的最大接触面积也不足10平方厘米,因此滑冰时在冰面上产生很大压强,使冰的熔点降低很多,冰刀接触的冰熔化成水,使冰刀与冰之间的摩擦力降的更低,更有利于冰鞋的滑动。
3.冰刀生产工艺的中对冰刀的检测主要包括粗糙度和刀刃轮廓,目前国际国内的厂商,对于该类检测的要求,采用的是传统的单台设备单点检测并采用手动换位。其最大的缺点,是不能实现机械化检测,效率低,且由于人工操作,测量结果不稳定,不适应于自动化生产线。
4.专利文献cn205175380u公开了一种冰刀外形线轮廓度检测工具,它包括底板,底板的表面为平整;在底板表面的两端分别设置有两个定位销,定位销凸出底板表面,所述的定位销分别与冰刀上的前装配沟、后装配沟配合;在两个定位销之间一侧的底板表面设置有安装座,在安装座上间隔的设置有若干组安装孔,在每组安装孔内设置有一个百分表。该专利文献的技术方案仅能够对冰刀的轮廓进行检测,粗糙度检测还需要另外的装置进行检测,导致检测装置多、检测工序多,导致占地空间大,也不利于提高生产效率。
技术实现要素:
5.针对现有技术中的缺陷,本实用新型的目的是提供一种冰刀检测装置。
6.根据本实用新型提供的一种冰刀检测装置,包括底座、上夹紧组件、下夹紧组件、翻转组件、测量组件以及单轴机器人;
7.所述上夹紧组件、下夹紧组件、翻转组件、测量组件以及单轴机器人均设置在底座上;上夹紧组件、下夹紧组件用于夹持冰刀,上夹紧组件连接翻转组件并能够在翻转组件的作用下进行翻转,测量组件连接单轴机器人并能够在单轴机器人的作用下运动到上夹紧组件或下夹紧组件位置对冰刀进行测量。
8.优选地,所述下夹紧组件设置在上夹紧组件与单轴机器人之间,下夹紧组件的位置低于上夹紧组件的位置,上夹紧组件翻转后位于下夹紧组件上方。
9.优选地,所述单轴机器人的运动方向与上夹紧组件夹持的冰刀的长度方向平行,所述单轴机器人的运动方向与下夹紧组件夹持的冰刀的长度方向平行。
10.优选地,所述翻转组件包括翻转机构安装支架、翻转机构以及摆动气缸;
11.所述翻转机构安装支架设置在底座上,翻转机构连接摆动气缸,翻转机构活动连接翻转机构安装支架并能够在摆动气缸的作用下相对翻转机构安装支架翻转;
12.所述翻转机构连接上夹紧组件。
13.优选地,所述测量组件包括轮廓测量仪、粗糙度仪以及气动滑台,所述轮廓测量仪连接气动滑台,气动滑台连接单轴机器人,粗糙度仪连接单轴机器人。
14.优选地,所述气动滑台的运动方向与单轴机器人的运动方向垂直,气动滑台能够带着轮廓测量仪在垂直于单轴机器人的运动方向的方向上往复运动。
15.优选地,所述粗糙度仪包括测量头,测量头能够在垂直于单轴机器人的运动方向的方向上往复运动。
16.优选地,所述上夹紧组件夹持冰刀在翻转前冰刀侧面竖直,在翻转后冰刀侧面水平。
17.优选地,所述下夹紧组件夹持冰刀后,冰刀侧面竖直。
18.根据本实用新型提供的一种冰刀检测装置,包括底座、上夹紧组件、下夹紧组件、翻转组件、测量组件以及单轴机器人;
19.所述上夹紧组件、下夹紧组件、翻转组件、测量组件以及单轴机器人均设置在底座上;上夹紧组件、下夹紧组件用于夹持冰刀,上夹紧组件连接翻转组件并能够在翻转组件的作用下进行翻转,测量组件连接单轴机器人并能够在单轴机器人的作用下运动到上夹紧组件或下夹紧组件位置对冰刀进行测量;
20.所述下夹紧组件设置在上夹紧组件与单轴机器人之间,下夹紧组件的位置低于上夹紧组件的位置,上夹紧组件翻转后位于下夹紧组件上方;
21.所述单轴机器人的运动方向与上夹紧组件夹持的冰刀的长度方向平行,所述单轴机器人的运动方向与下夹紧组件夹持的冰刀的长度方向平行;
22.所述翻转组件包括翻转机构安装支架、翻转机构以及摆动气缸;
23.所述翻转机构安装支架设置在底座上,翻转机构连接摆动气缸,翻转机构活动连接翻转机构安装支架并能够在摆动气缸的作用下相对翻转机构安装支架翻转;
24.所述翻转机构连接上夹紧组件;
25.所述测量组件包括轮廓测量仪、粗糙度仪以及气动滑台,所述轮廓测量仪连接气动滑台,气动滑台连接单轴机器人,粗糙度仪连接单轴机器人;
26.所述气动滑台的运动方向与单轴机器人的运动方向垂直,气动滑台能够带着轮廓测量仪在垂直于单轴机器人的运动方向的方向上往复运动;
27.所述粗糙度仪包括测量头,测量头能够在垂直于单轴机器人的运动方向的方向上往复运动;
28.所述上夹紧组件夹持冰刀在翻转前冰刀侧面竖直,在翻转后冰刀侧面水平;
29.所述下夹紧组件夹持冰刀后,冰刀侧面竖直。
30.与现有技术相比,本实用新型具有如下的有益效果:
31.1、本实用新型结构简单合理,通过采用单轴机器人递送多个测量组件对冰刀进行测量,能够同时测量多种冰刀检测参数。
32.2、本实用新型采用上夹紧组件和下夹紧组件,通过翻转机构实现上夹紧组件的翻转,从而实现了对冰刀侧面和端面的检测,解决了同一检测平台对冰刀不同检测位置的兼容问题,大大降低了设备成本。
33.3、本实用新型通过采用单轴承机器人的递送机构,单轴机器人与冰刀长度方向平行设置,能够检测冰刀被测长度范围内的任意点表面粗糙度以及冰刀的完整轮廓。
34.4、本实用新型通过采用气动滑台,解决了检测过种中多个测量仪器之间的相互干涉问题。
附图说明
35.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
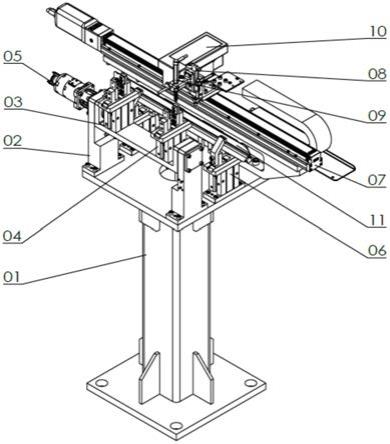
36.图1为本实用新型下夹紧组件处于工作状态的立体结构示意图。
37.图2为本实用新型下夹紧组件处于工作状态的侧视结构示意图。
38.图3为本实用新型上夹紧组件处于工作状态的立体结构示意图。
39.图4为本实用新型上夹紧组件处于工作状态的侧视结构示意图。
40.图中示出:
41.01-底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
07-单轴机器人
42.02-翻转机构安装支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
08-气动滑台
43.03-翻转机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
09-轮廓测量仪
44.04-上夹紧组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10-粗糙度仪
45.05-摆动气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11-冰刀
46.06-下夹紧组件
具体实施方式
47.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
48.在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
49.根据本实用新型提供的一种冰刀检测装置,如图1-4所示,包括底座01、上夹紧组件04、下夹紧组件06、翻转组件、测量组件以及单轴机器人07;所述上夹紧组件04、下夹紧组件06、翻转组件、测量组件以及单轴机器人07均设置在底座01上;上夹紧组件04、下夹紧组件06用于夹持冰刀11,上夹紧组件04连接翻转组件并能够在翻转组件的作用下进行翻转,测量组件连接单轴机器人07并能够在单轴机器人07的作用下运动到上夹紧组件04或下夹紧组件06位置对冰刀11进行测量。
50.所述下夹紧组件06设置在上夹紧组件04与单轴机器人07之间,下夹紧组件06的位置低于上夹紧组件04的位置,上夹紧组件04翻转后位于下夹紧组件06上方。所述单轴机器人07的运动方向与上夹紧组件04夹持的冰刀11的长度方向平行,所述单轴机器人07的运动方向与下夹紧组件06夹持的冰刀11的长度方向平行。
51.所述翻转组件包括翻转机构安装支架02、翻转机构03以及摆动气缸05;所述翻转机构安装支架02设置在底座01上,翻转机构03连接摆动气缸05,翻转机构03活动连接翻转
机构安装支架02并能够在摆动气缸05的作用下相对翻转机构安装支架02翻转;所述翻转机构03连接上夹紧组件04。
52.所述测量组件包括轮廓测量仪09、粗糙度仪10以及气动滑台8,所述轮廓测量仪09连接气动滑台8,气动滑台8连接单轴机器人07,粗糙度仪10连接单轴机器人07。所述气动滑台8的运动方向与单轴机器人07的运动方向垂直,气动滑台8能够带着轮廓测量仪09在垂直于单轴机器人07的运动方向的方向上往复运动。所述粗糙度仪10包括测量头,测量头能够在垂直于单轴机器人07的运动方向的方向上往复运动。
53.所述上夹紧组件04夹持冰刀11在翻转前冰刀11侧面竖直,在翻转后冰刀11侧面水平,上夹紧组件04用于冰刀11侧面的检测。所述下夹紧组件06夹持冰刀11后,冰刀11侧面竖直,下夹紧组件06用于冰刀11端面的检测。
54.利用本实用新型进行冰刀11刃口端面检测(粗糙度及轮廓度检测)的过程如下:
55.如图1-2所示,由上下料机器人将冰刀11准确放于下夹紧组件06位置,下夹紧组件06将冰刀11夹紧后,由单轴机器人07将测量组件送至检测位置(可以设置多处)后,粗糙度仪10测量头下探至冰刀11刃口端面,便可进行该面的粗糙度检测,完毕后粗糙度仪10抬起归位。而后,单机机器人07带动轮廓测量仪09至轮廓检测起始位置,由气动滑台08下落,轮廓测量仪09测量头靠到冰刀11刃口端面上,再由单轴机器人07带动轮廓测量仪09沿长度方向滑行设定的测量距离,便可测量出冰刀11刃口的轮廓值及精度。
56.利用本实用新型进行冰刀11刃口侧面检测(粗糙度检测)的过程如下:
57.如图3-4所示,由上下料机器人将冰刀11准确放于上夹紧组件04位置,上夹紧组件04件冰刀11夹紧后,翻转机构03由摆动气缸驱动翻转90
°
致使冰刀侧面水平,然后由单轴机器人07将测量组件送至检测位置(可以设置多处),粗糙度仪10测量头下探至冰刀11刃口侧面,即可对该面进行粗糙度检测。如果想测量另一侧面,则需要翻转机构03回位,上夹紧组件04松开,上下料机器人取出冰刀,翻转180
°
后再放入上夹紧组件04,重复上步骤即可实现。
58.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1