一种燃气轮机叶顶间隙三维流场测量装置
1.本实用新型涉及光学测量技术领域,具体地说,涉及一种燃气轮机叶顶间隙三维流场测量装置。
背景技术:
2.燃气轮机是发电工业中的高端装备,其技术含量和设计制造难度居所有机械设备之首,被称为机械制造行业“皇冠上的明珠”,是衡量一个国家工业先进水平和科技能力的标志之一,在国民经济和能源电力工业中具有重要的战略地位。
3.在燃气轮机叶片顶部与气缸机匣面之间存在着一定的间隙(叶顶间隙,一般是弦长的1%~6%,毫米级),通过叶顶间隙的泄漏流动不可避免。虽然叶顶间隙的几何尺寸同整个流道相比是非常小的,但它却对叶片流道内近20%区域的流动产生影响。叶尖泄漏流动将导致叶尖附近做功减少,导致通道堵塞以及流动损失增加。发展先进的流动测量技术,认识叶顶间隙泄漏流流动规律,设计叶片结构主动控制相关流动,是抑制叶尖泄漏流动的重要技术方法。
4.现有的叶顶间隙流动测量技术有粒子图像测速技术(particle imagevelocity,piv),体视粒子图像测速技术(stereoscopic particle imagevelocimetry,spiv),激光多普勒测速技术(laser doppler velocimetry, ldv),纹阴技术等。piv技术是一种二维测量技术,是片光源切面内的二维流场。spiv技术是在piv基础上发展的三维测量技术,通过多台相机得到不同角度方向的图像,进而求解三维流场,该技术需要多台相机,系统复杂,成本较高。ldv技术是一种单点测量技术,通过测点的三维移动,可以获得空间的速度分布。纹阴技术是基于被测流场的折射率梯度(密度差)来定性描述流场特征,较适用于超高速流场的定性表征。
5.针对燃气轮机叶顶间隙三维流场测量的需求,克服现有技术的不足,发展新的测量装置及方法,获得叶顶间隙泄漏流流动规律,对提高我国燃气轮机的装备水平具有重要的意义。
技术实现要素:
6.本实用新型的目的是提供一种燃气轮机叶顶间隙三维流场测量装置,能够实现燃机叶顶间隙狭小复杂流道的三维流场测量。
7.为了实现上述目的,本实用新型提供的燃气轮机叶顶间隙三维流场测量装置包括:
8.光源,发射光束,并通过分束器将该光束分成照明光路和参考光路;
9.弧形缝隙调节机构,设置在所述照明光路上,将照明光束调整为与叶顶间隙形状相适应的弧形光束,并入射到叶顶间隙内;
10.合束器,将叶顶间隙被照明的示踪粒子散射的信号光与所述参考光路上的参考合成为一束合成光;
11.相机,设置在所述合成光的光路上,用于记录示踪粒子的相干图像;
12.处理器,用于处理示踪粒子相干图像,反演示踪粒子三维位置,并计算叶顶间隙三维流场。
13.上述技术方案中,燃气轮机属于旋转机械,气缸内表面为圆弧形,故叶顶间隙也为圆弧形,通过弧形缝隙调节机构将光束调节为与燃机叶顶间隙流道相似的弧形光束。通过示踪粒子的相干图像计算叶顶间隙的三维流场。实现了燃机叶顶间隙狭小复杂流道的三维流场测量。
14.可选地,在一个实施例中,所述的照明光路上依次设有凸透镜、柱透镜和反射镜,所述的弧形缝隙调节机构位于反射镜的反射光路上,照明光束依次经过凸透镜和柱透镜后形成片光束,再由反射镜反射到所述弧形缝隙调节机构,形成弧形片光束。
15.可选地,在一个实施例中,所述的参考光路上设有用于调节光程及光束方向的反射镜组、用于调节光强的中性衰减片、以及用于提高光的均匀性的空间滤波器。
16.中性衰减片的衰减率可调,可调节参考光光强使其与示踪粒子侧向散射光信号光强相近。为了提高示踪粒子相干图像的信噪比,优选的通过提高光源的能量,增加照亮示踪粒子的光强,同时增加中性衰减片的衰减率,使参考光光强与示踪粒子侧向散射光信号光强相近。
17.为了使参考光与示踪粒子侧向散射光满足相干条件,可选地,在一个实施例中,所述的反射镜组为安装在高精度位移台上的45
°
反射镜组,调节反射镜的位置可改变参考光的光程。
18.可选地,在一个实施例中,所述的弧形缝隙调节机构包括带有弧形狭缝的基板和安装在所述基板上并通过移动来改变所述弧形狭缝宽度的弧形板。由于弧形片光束打到叶片顶端或者玻璃窗口上的散射光强于示踪粒子的散射光,故示踪粒子的散射光信号会被淹没,为了使弧形片光束只照亮叶顶间隙流道内示踪粒子,优选的弧形光束产生的弧形光束厚度可通过弧形狭缝调节,弧形光束厚度小于叶顶间隙。
19.可选地,在一个实施例中,所述的叶顶间隙外设有弧形玻璃窗口,示踪粒子散射的信号光首先经过所述弧形玻璃窗口后再进入所述合束器。
20.由于示踪粒子的侧向散射光信号光强远小于照射示踪粒子的光强,为了增加照射示踪粒子的光强,可选地,在一个实施例中,所述的分束器为分束镜,其反射率为10%,透射率为90%,反射光用作参考光,透射光用作照明光。
21.可选地,在一个实施例中,所述的合束器的合束光路上设有将相干图像放大的放大透镜。
22.与现有技术相比,本实用新型的有益之处在于:
23.本实用新型设备紧凑,成本低,易操作,能够实现燃机叶顶间隙狭小复杂流道的三维流场测量。
附图说明
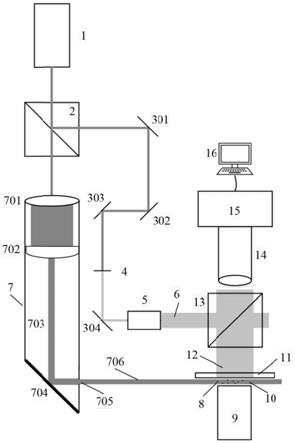
24.图1为本实用新型实施例中燃气轮机叶顶间隙三维流场测量装置的结构示意图;
25.图2为本实用新型实施例中弧形缝隙调节机构的结构示意图;
26.图3为本实用新型实施例中叶顶间隙流道示意图;
27.图4为本实用新型实施例中燃气轮机叶顶间隙三维流场测量装置的现场测试布置示意图。
具体实施方式
28.为使本实用新型的目的、技术方案和优点更加清楚,以下结合实施例及其附图对本实用新型作进一步说明。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.除非另外定义,本实用新型使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。本实用新型中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
30.实施例
31.参见图1,本实施例的燃气轮机叶顶间隙三维流场测量装置包括:
32.光源1,为双脉冲激光器,用于发出两束时间间隔可调的相干激光束;
33.分束镜2,用于将一束光分为照明光束和参考光束,其中照明光束用于照亮测量区域;
34.45
°
反射镜组,包括反射镜301、反射镜302、反射镜303和反射镜 304,用于调节参考光的光程及光束方向;
35.中性衰减片4,用于调节参考光光强;
36.空间滤波器5,用于提高参考光的均匀性;
37.弧形光束系统7,包括凸透镜701、柱透镜702、反射镜704和弧形缝隙调节机构705,弧形缝隙调节机构705位于反射镜704的反射光路上,照明光束依次经过凸透镜和柱透镜后形成片光束703,再由反射镜704反射到弧形缝隙调节机构705,形成厚度可调的弧形片光束706,并入射到叶顶间隙10内;叶顶间隙10为旋转叶片9叶顶和静止气缸壁间的间隙;
38.弧形玻璃窗口11,用于叶顶间隙10内示踪粒子8散射的信号光12 通过,内表面与气缸壁面形状一致;
39.合束镜13,用于将示踪粒子的信号光12和参考光6合成一束;
40.显微镜头14,用于放大示踪粒子的相干图像;
41.相机15,用于记录示踪粒子的相干图像;
42.计算机16,用于处理示踪粒子相干图像,反演示踪粒子三维位置,计算叶顶间隙三维流场。
43.由于示踪粒子8的侧向散射光信号光强远小于照射示踪粒子的光强,为了增加照射示踪粒子的光强,设置分束镜2的反射率为10%,透射率为90%,反射光用作参考光,透射光用于照亮测量区域。
44.在参考光路中布置中性衰减片4,且中性衰减片4的衰减率可调,以便调节参考光
光强与示踪粒子侧向散射光信号光强相近。
45.通过提高激光器的能量,增加照亮示踪粒子8的光强,同时增加中性衰减片4的衰减率,使参考光光强与示踪粒子8侧向散射光信号光强相近。以便提高示踪粒子相干图像的信噪比。
46.为了使参考光与示踪粒子侧向散射光满足相干条件,将45
°
反射镜组安装在高精度位移台上,调节反射镜的位置可改变参考光的光程。
47.由于弧形片光束706打到叶片顶端或者玻璃窗口上的散射光强于示踪粒子8的散射光,故示踪粒子8的散射光信号会被淹没,为了使弧形片光束706只照亮叶顶间隙10流道内的示踪粒子8,弧形光束706的厚度通过弧形缝隙调节机构705调节,弧形光束706厚度小于叶顶间隙。参见图 2和图3,本实施例的弧形缝隙调节机构705包括带有弧形狭缝7053的基板7051和安装在基板7051上并通过移动来改变弧形狭缝7053宽度的弧形板7052。参见图4,叶片9包括动叶片901和静叶片或导流叶片902。
48.为了减少光源对被测流场的干扰,弧形光束系统7集成为光探针的形式,结构紧凑,直径10mm,在试验时,弧形光束系统7沿径向伸入动静叶片之间,位于被测叶顶间隙流道气流的下游,出光方向与气流方向相反。
49.为了能够记录反映流场信息的示踪粒子三维位置信息,弧形光束照亮示踪粒子后,示踪粒子侧向散射光经过合束镜13与参考光干涉,相机 15记录示踪粒子的相干图像,相干图像中包括了示踪粒子的大小和三维位置信息。
50.利用上述装置进行燃气轮机叶顶间隙三维流程测量,具体包括以下步骤:
51.(1)根据叶顶间隙10的大小调整弧形光束系统7弧形狭缝的宽度,调整弧形狭缝的宽度使其略小于叶顶间隙,避免弧形光束打到叶片顶端或光学窗口。
52.(2)在测量区域上游静叶流道入口加载示踪粒子8,示踪粒子8跟随气流流到被测叶顶间隙10的流道内;为了减少示踪粒子8的用量,避免示踪粒子8对光源的玷污,在测量区域上游静叶流道入口802加载示踪粒子。
53.(3)调整45
°
反射镜组的位置,使参考光与示踪粒子8的信号光光程差满足相干条件,
54.(4)根据气流速度调整双脉冲激光器的出光时间间隔,
55.(5)示踪粒子相干图像对经过透镜放大后被相机15记录,相干图像中包括了示踪粒子的大小和位置信息。
56.(6)利用软件处理示踪粒子的相干图像,反演示踪粒子的三维位置,计算叶顶间隙三维流场,根据图像对中示踪粒子的三维位移计算三维速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1