测量作用在机动车辆转向轴上的力矩的装置和检查该装置的方法与流程
1.本发明首先涉及一种用于测试用于测量作用在机动车辆转向轴上的力矩的装置的方法。转向轴具有轴线,该转向轴在该轴线上延伸并且可以绕该轴线旋转。使用逆磁致伸缩效应测量力矩。转向轴具有至少两个磁化区域,这些磁化区域围绕轴线周向延伸并且形成用于测量的初级传感器。装置包括至少四个磁场传感器作为次级传感器。根据本发明的方法使得能够识别装置的故障。本发明还涉及一种用于测量作用在机动车辆转向轴上的力矩的装置。
背景技术:
2.美国专利第6,758,105 b2号公开了用于检测轴(例如机动车辆的转向柱)上的扭转载荷的磁弹性力矩传感器装置。力矩传感器组件包括限定轴向通道并具有轴向开口的模制塑料体。力矩传感器装置还包括u形引线框架,该u形引线框架嵌入模制塑料体中并且具有在模制塑料体的侧部内围绕通道延伸的侧部。磁流量传感器嵌入模制塑料体的侧部部分并且连接至引线框架。轴通过模制塑料体中的轴向开口径向地接收,并且同轴地定位在通道内以供使用。磁通传感器以预定且固定的布置围绕轴定位。传感器阵列优选地包括直径上相对或轴向上间隔地布置在包括轴线的平面中的传感器。
3.美国专利第8,672,086 b2号公开了一种转向设备,其包括可旋转转向轴,该转向轴具有外侧、用于连接转向元件的输入端以及用于连接至车辆的至少一个方向盘的输出端。使用电动机来驱动转向轴。转向轴是磁化的并且也可以用作力矩传感器。至少一个磁场传感器相邻于转向轴的外侧定位。转向轴和至少一个磁场传感器形成力矩传感器,用于检测由可手动操作的转向元件施加至转向轴的力矩。
4.美国专利第8,650,969 b2号、美国专利第9,630,648 b2号和美国专利第8,584,533 b2号示出了磁致伸缩力矩传感器,其基于轴等材料的磁导率由于扭转而改变的事实。
5.美国专利第8,020,454 b2号和美国专利第9,114,833 b2号示出了尤其用于机动车辆的转向轴的力矩传感器,其包括具有交替磁极的磁极环。
6.美国专利第8,943,879 b2号和美国专利第8,776,619 b2号示出了使用磁齿结构的尤其用于机动车辆的转向轴的力矩传感器。
7.从美国专利第9,296,415 b2号已知一种电子操作的机动车辆转向柱,其包括用于转向轴的力矩传感器。
8.美国专利第8,893,562 b2号公开了一种用于检测磁弹性力矩传感器中的磁噪声的方法。力矩传感器包括具有相反极化的磁化的力矩转换器以及能够在二者之间切换的若干磁场传感器。
9.美国专利第8,578,794 b2号公开了一种磁弹性力矩传感器,其具有纵向延伸的元件和若干磁弹性活动区域以及轴向间隔开的初级和次级磁场传感器。
10.从美国专利第8,087,304 b2号已知一种磁弹性力矩传感器,其包括具有多个磁弹
性活动区域的纵向延伸元件。力矩传感器包括作为惠斯通电桥连接的初级和次级磁场传感器。
11.美国专利第2004/0154412 a1号公开了用于测量从磁弹性波产生的发散磁场的传感器。轴具有两个磁化区域,这两个磁化区域中的每一个分配有用于测量磁场的两个线圈。
12.美国专利第2014/0360285 a1号公开了一种磁弹性力矩传感器,利用该磁弹性力矩传感器可以测量作用在中空轴上的力矩。中空轴具有交替极性的三个周向磁化的磁化区域。四个次级磁场传感器与磁化区域相对地布置。
13.从美国专利第9,151,686 b2号已知一种磁弹性力矩传感器,据称其具有降低的信号噪声。力矩传感器包括中空轴,该中空轴具有交替极性的三个周向磁化的磁化区域。多达八个磁场传感器与磁化区域相对地布置。
14.de10 2015 209 286 a1公开了使用逆磁致伸缩效应测量机械元件上的力和/或力矩的装置和方法。机械元件具有至少一个磁化区域以用于磁化。使用至少两个间隔开的磁场传感器来测量由磁化以及力和/或力矩引起的磁场。根据方法,单独处理来自磁场传感器的测量信号。
技术实现要素:
15.本发明的目的是基于现有技术改进在基于逆磁致伸缩效应测量作用在机动车辆转向轴上的力矩时对故障的检测,以例如能够满足功能安全性领域的更高要求。
16.所述目的通过根据所附权利要求1的方法和根据所附独立权利要求10的装置来实现。
17.使用根据本发明的方法来测试被设计用于测量作用在机动车辆转向轴上的力矩的装置。转向轴也被称为转向柱并且形成机动车辆的转向系统的一部分。转向轴用于将力矩从方向盘传递并且可能还传递至方向盘。转向轴具有在其中延伸的轴线。该轴线还形成转向轴的旋转轴线。利用根据本发明的方法,装置的正确运行被监视并且装置的故障能够被识别。
18.力矩作用在装置的转向轴上,因此产生机械应力并且转向轴通常轻微变形。下面给出的方向——即轴向方向、径向方向和切向方向或周向方向——与所提及的转向轴的轴线有关。
19.装置优选地设计用于测量位于轴线内的力矩,使得该力矩是转向轴被加载的扭转力矩。力矩的矢量位于轴线内。力矩优选地是转向力矩。装置优选地用于测量转向力矩。装置优选地形成机电动力转向系统的部件。机电动力转向系统还包括机电驱动单元和电子控制单元,该电子控制单元电连接至用于测量转向力矩的装置。机电动力转向系统的机电驱动单元基于使用装置测量的转向力矩的测量值来控制。
20.转向轴具有围绕轴线周向延伸的至少两个磁化区域,每个磁化区域用于形成在转向轴中的磁化。因此,存在围绕轴线的至少两个磁化区域,即圆形磁化区域,由此轴线本身优选地不形成磁化区域的一部分。磁化区域优选地仅具有相对于转向轴的围绕轴线延伸的表面的切向对准。磁化区域优选地各自沿围绕轴线的闭合路径延伸,并且磁化区域可以具有短间隙。磁化区域优选地具有相同的空间范围并且轴向间隔开。磁化区域特别优选地设计成磁化轨道的形式。磁化区域形成用于确定力矩的初级传感器。
21.转向轴优选地还具有磁中性区域,该磁中性区域各自轴向地布置在磁化区域之间和/或轴向地紧邻转向轴的磁化区域布置。转向轴优选地具有所提及的磁中性区域中的至少一个磁中性区域。磁中性区域既没有永久磁化,也没有被设计成暂时磁化磁中性区域的装置。磁中性区域优选地未被磁化。磁中性区域优选地各自形成在转向轴的轴向部段中。
22.装置还包括至少四个磁场传感器,它们形成用于确定力矩的次级传感器。初级传感器——即磁化区域——用于将要测量的力矩转换成对应的磁场,而次级传感器使得该磁场能够转换成电信号。磁场传感器各自被设计用于对由磁化和力矩引起的磁场的轴向对准方向分量进行单独测量。所提及的磁场由于逆磁致伸缩效应而产生。因此,利用装置可能的测量基于逆磁致伸缩效应。
23.存在磁场传感器中的至少两个磁场传感器的至少两个不同组合,这些组合中的每个组合足以测量力矩。因此,至少两个组合在其用于测量同一力矩的适用性方面是冗余的。这些组合应当在组合学的意义上理解,并且每个组合表示对磁场传感器中的至少两个磁场传感器的选择,其中,这些组合可以包括不同数目的磁场传感器,并且这些组合中的一个组合可以由所有磁场传感器形成。可以从至少四个磁场传感器中选择至少两个不同组合,这些组合中的每个组合均适于测量力矩。特别优选地,存在磁场传感器中的至少两个磁场传感器的组合中的至少三个组合,这些组合中的每个组合足以测量力矩。
24.磁场传感器与转向轴相对地布置,其中优选地在磁场传感器与转向轴的外表面或内表面之间仅存在小的径向距离。磁场传感器优选地位于距轴线相同的距离处。
25.可以将磁化区域和与磁化区域相对地布置的磁场传感器部置在转向轴的很大程度上任意的轴向位置处;例如,在连接至机电动力转向系统的机电驱动单元、方向盘或转向齿轮的转向轴的轴向部段中,或者在转向轴的两个轴向端部之间。在转向轴具有万向接的情况下,也可以将磁化区域和与磁化区域相对地布置的磁场传感器布置在转向轴与万向接连接的轴向部段中。
26.在根据本发明的方法的步骤中,在力矩作用的同时利用磁场传感器的组合中的第一组合确定力矩的第一测量值。根据来自属于第一组合的各个磁场传感器的测量信号确定第一测量值。
27.在根据本发明的方法的另一步骤中,在力矩作用的同时利用磁场传感器的组合中的第二组合确定力矩的第二测量值。根据来自属于第二组合的各个磁场传感器的测量信号确定第二测量值。
28.第一测量值的确定和第二测量值的确定优选地同时进行或者至少在力矩不改变的时间跨度内进行。测量值定性地和定量地表示同一力矩。
29.由于磁场传感器的第一组合和磁场传感器的第二组合各自足以测量力矩,因此如果装置正常工作,则第一测量值和第二测量值是相同的。根据本发明,将第一测量值与第二测量值进行比较,使得该比较的结果可以用于推断装置正确地运行或者装置不正确地运行。如果比较得出系统不正确地运行的结论,则还优选地确定各个磁场传感器中的哪个磁场传感器不正确地运行。
30.根据本发明的方法的特别的优点是,测量值的比较的结果提供了关于装置是正确地工作还是不正确地工作的很大程度上可靠的陈述。
31.至少两个磁化区域可以被永久磁化或暂时磁化。磁化区域优选地被永久磁化,使
得磁化通过永久磁化形成。替选地,装置还优选地具有用于磁化磁化区域的至少一个磁体,使得磁化区域的磁化基本上是暂时的。该至少一个磁体可以由永磁体或优选地由电磁体组成。
32.当转向轴未被力矩加载时,永久或暂时磁化的磁化区域优选地对磁化区域的外部是磁中性的,使得在磁化区域外部不能测量技术上相关的磁场。
33.磁化区域各自表示转向轴的体积的一部分。磁化区域优选地各自设计为环形形状,转向轴的轴线也形成相应环形形状的中心轴线。特别优选地,磁化区域各自具有与转向轴的轴线同轴的中空圆柱体的形状。
34.磁化区域优选地各自具有高磁致伸缩度。
35.磁化区域优选地彼此轴向间隔地布置,其中,磁中性区域中之一可以被布置在两个相邻的磁化区域之间。如果存在多于两个的磁化区域,则它们各自优选地彼此相距相同的距离。
36.围绕轴线周向延伸的轴向相邻的磁化区域优选地具有相反极性,即,它们具有相反的旋转方向。
37.转向轴至少在磁化区域由磁致伸缩或磁弹性材料构成。转向轴优选地完全由磁致伸缩或磁弹性材料构成。转向轴优选地由钢制成。
38.转向轴优选地具有圆柱体或可能的棱柱的形状,该圆柱体或棱柱与轴线同轴地布置。圆柱体或棱柱优选地是直的。转向轴优选地具有直圆柱体的形状,该圆柱体与轴线同轴地布置。在特定实施方式中,圆柱或棱柱在形状上是圆锥形的。转向轴也可以设计为中空轴,使得转向轴具有腔。
39.磁场传感器优选地各自由半导体传感器组成。替选地,至少两个磁场传感器优选地各自由mr传感器、霍尔传感器、场板、squid、线圈元件、福斯特探测器或磁通门磁力计组成。原则上,也可以使用其他类型的传感器,只要它们适于测量由逆磁致伸缩效应引起的磁场的轴向方向分量。
40.磁场传感器优选地在距转向轴的轴线相同的距离处。原则上,可以将磁场传感器布置在转向轴的外部或转向轴中的腔内部;例如,如果转向轴被设计为中空轴。
41.优选地,磁场传感器各自具有类似于磁化区域之一的轴向位置。磁场传感器优选地各自具有等于磁化区域之一的平均轴向位置的轴向位置。
42.磁场传感器优选地各自具有与磁场传感器中的至少一个其他磁场传感器相同的切向位置或相同的周向位置。这至少两个磁场传感器优选地一起位于与轴线平行的直线上。具有相同切向位置或相同周向位置的这至少两个磁场传感器轴向相邻,并且优选地各自具有与磁化区域中的轴向相邻的磁化区域相同的轴向位置。具有相同切向位置或相同周向位置的两个磁场传感器也可以具有与磁化区域中的仅一个磁化区域相同的轴向位置。
43.磁化区域中的至少一个磁化区域优选地具有与磁场传感器中的至少两个磁场传感器相同的轴向位置,使得磁场传感器中的两个磁场传感器被分配给该磁化区域。具有相同轴向位置的这两个磁场传感器优选地相对于轴线彼此相对地布置,使得它们彼此具有180
°
的圆心角并且与这两个磁场传感器相交的直线与轴线垂直相交。进一步优选地,每个磁化区域具有与磁场传感器中的两个磁场传感器相同的轴向位置,使得磁场传感器中的至少两个磁场传感器被分配给每个磁化区域。
44.装置优选地还包括测量信号处理单元,该测量信号处理单元被设计成确定和比较测量值。磁场传感器优选地单独地电连接至测量信号处理单元,使得在每种情况下,单个测量信号从每个磁场传感器传递到测量信号处理单元。根据本发明的方法的优选实施方式包括单独校准磁场传感器的步骤。因此,可以补偿偏移并且可以相互比较磁场传感器的灵敏度,使得再次提高错误检测的可靠性。
45.特别优选地确定并且相互比较测量值中的至少三个测量值。因此,优选地存在磁场传感器中的至少两个磁场传感器的组合中的至少三个组合,这些组合中的每个组合足以测量力矩。在力矩作用的同时利用磁场传感器的组合中的第三组合确定力矩的第三测量值。将第一测量值、第二测量值和第三测量值相互比较。此外,优选地确定并且相互比较测量值中的至少四个测量值。确定并且比较测量值中的三个或更多个测量值的这些实施方式优选地包括附加步骤,通过该附加步骤,在测量值之间存在差异的情况下,确定不正确地操作的磁场传感器中的一个或多个磁场传感器。另外,可以确定磁化区域中之一是否不正确地运行。
46.在根据本发明的方法的优选实施方式中,形成测量值之间的差的绝对量或测量值之间的差的平方以比较测量值。优选地形成测量值之间的差的绝对量之和或测量值之间的差的平方和。对应的和优选地用作测试信号。
47.如果测量值之间的差的绝对量之和或测量值之间的差的平方和超过先前定义的最大值,则优选地输出错误信号。最大值预先定义测量值之间的差,直至最大值,认为装置无误地操作。错误信号优选地被报告给装置的操作者或更高级别的控制器,使得更高级别的控制器或操作者意识到装置不再无误地进行测量。
48.在根据本发明的方法的第一特别优选的实施方式中,装置被设计成测量作用在转向轴上并且位于轴线内的力矩,即,扭转力矩。转向轴具有极性相反的两个磁化区域。每个磁化区域具有与磁场传感器中的两个磁场传感器相同的轴向位置,具有相同轴向位置的这两个磁场传感器相对于轴线彼此相对地布置。四个磁场传感器中的两个磁场传感器各自具有相同的切向位置并且轴向相邻。四个磁场传感器中的第一磁场传感器输出测量信号a1。相对于轴线与第一磁场传感器相对并且具有与第一磁场传感器相同的轴向位置的磁场传感器形成第二磁场传感器,该第二磁场传感器输出测量信号a2。测量信号a1和a2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和a2表示符号不同的轴向方向分量。与第一磁场传感器轴向相邻并且具有与第一磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第三磁场传感器,该第三磁场传感器输出测量信号b1。测量信号a1和b1表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和b1表示符号相同的轴向方向分量。关于轴线与第三磁场传感器相对并且具有与第三磁场传感器相同的轴向位置的磁场传感器形成磁场传感器中的第四磁场传感器,该第四磁场传感器输出测量信号b2。测量信号b1和b2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b1和b2表示符号不同的轴向方向分量。根据以下数学规则中之一确定力矩的测量值中的至少两个测量值:
49.[0050][0051][0052]
数学规则示出,存在足以测量力矩的磁场传感器的组合中的至少三个组合。第一组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器和第四磁场传感器。第二组合包括第一磁场传感器和第四磁场传感器。第三组合包括第二磁场传感器和第三磁场传感器。
[0053]
优选地,根据以下规则中之一确定测试信号t:
[0054]
t=|m1‑
m2|
[0055]
t=|m1‑
m3|
[0056]
t=|m2‑
m3|
[0057]
t=(m1‑
m2)2[0058]
t=(m1‑
m3)2[0059]
t=(m2‑
m3)2[0060]
优选地,不仅确定两个,而是确定所有三个测量值m1、m2和m3。优选地,根据以下规则中之一确定测试信号t:
[0061]
t=|m1‑
m2|+|m1‑
m3|+|m2‑
m3|
[0062]
t=(m1‑
m2)2+(m1‑
m3)2+(m2‑
m3)2[0063]
在根据本发明的方法的第二特别优选的实施方式中,装置还适于测量作用在转向轴上并且位于轴线内的力矩,即,扭转力矩。转向轴具有交替极性的三个磁化区域。磁化区域中的轴向中心的一个磁化区域具有与磁场传感器中的两个磁场传感器相同的轴向位置,具有相同轴向位置的这两个磁场传感器相对于轴线彼此相对地布置。四个磁场传感器中的两个磁场传感器各自具有相同的切向位置并且轴向相邻。轴向布置在外部的磁化区域各自具有与四个磁场传感器中的一个磁场传感器相同的轴向位置。四个磁场传感器中的第一磁场传感器具有与轴向布置在外部的磁化区域中的一个磁化区域相同的轴向位置。第一磁场传感器输出测量信号a1。与第一磁场传感器轴向相邻并且具有与第一磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第二磁场传感器,该第二磁场传感器输出测量信号b1。测量信号a1和b1表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和b1表示符号相同的轴向方向分量。关于轴线与第二磁场传感器相对并且具有与第二磁场传感器相同的轴向位置的磁场传感器形成磁场传感器中的第三磁场传感器,该第三磁场传感器输出测量信号b2。测量信号b1和b2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b1和b2表示符号不同的轴向方向分量。与第三磁场传感器轴向相邻并且具有与第三磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第四磁场传感器,该第四磁场传感器输出测量信号c2。测量信号b2和c2表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b2和c2表示符号相同的轴向方向分量。根据以下规则中之一确定力矩的测量值中的至少两个测量值:
[0064][0065][0066][0067]
数学规则示出,存在足以测量力矩的磁场传感器的组合中的至少三个组合。第一组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器和第四磁场传感器。第二组合包括第一磁场传感器和第四磁场传感器。第三组合包括第二磁场传感器和第三磁场传感器。
[0068]
优选地,根据以下规则中之一确定测试信号t;
[0069]
t=|m1‑
m2|
[0070]
t=|m1‑
m3|
[0071]
t=|m2‑
m3|
[0072]
t=(m1‑
m2)2[0073]
t=(m1‑
m3)2[0074]
t=(m2‑
m3)2[0075]
优选地,不仅确定两个,而是确定所有三个测量值m1、m2和m3。优选地,根据以下规则中之一确定测试信号t:
[0076]
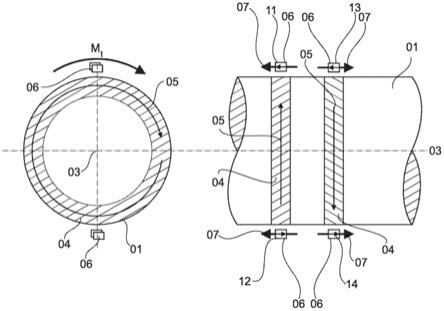
t=|m1‑
m2|+|m1‑
m3|+|m2‑
m3|
[0077]
t=(m1‑
m2)2+(m1‑
m3)2+(m2‑
m3)2[0078]
在根据本发明的方法的第三特别优选的实施方式中,装置被设计成测量作用在转向柱上并且位于轴线内的力矩,即,扭转力矩。转向柱具有交替极性的三个磁化区域。每个磁化区域具有与磁场传感器中的两个磁场传感器相同的轴向位置,具有相同轴向位置的这两个磁场传感器相对于轴线彼此相对地布置。六个磁场传感器中的三个磁场传感器各自具有相同的切向位置并且轴向相邻。六个磁场传感器中的第一磁场传感器具有与轴向布置在外部的磁化区域中的一个磁化区域相同的轴向位置。第一磁场传感器输出测量信号a1。相对于轴线与第一磁场传感器相对并且具有与第一磁场传感器相同的轴向位置的磁场传感器形成第二磁场传感器,该第二磁场传感器输出测量信号a2。测量信号a1和a2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和a2表示符号不同的轴向方向分量。与第一磁场传感器轴向相邻并且具有与第一磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第三磁场传感器,该第三磁场传感器输出测量信号b1。第三磁场传感器具有与中心磁化区域相同的轴向位置。测量信号a1和b1表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和b1表示符号相同的轴向方向分量。关于轴线与第三磁场传感器相对并且具有与第三磁场传感器相同的轴向位置的磁场传感器形成磁场传感器中的第四磁场传感器,该第四磁场传感器输出测量信号b2。测量信号b1和b2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信
号b1和b2表示符号不同的轴向方向分量。与第三磁场传感器轴向相邻并且具有与第一磁场传感器和第三磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第五磁场传感器,该第五磁场传感器输出测量信号c1。测量信号b1和c1表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b1和c1表示符号相同的轴向方向分量。关于轴线与第五磁场传感器相对并且具有与第五磁场传感器相同的轴向位置的磁场传感器形成磁场传感器中的第六磁场传感器,该第六磁场传感器输出测量信号c2。测量信号c1和c2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号c1和c2表示符号不同的轴向方向分量。根据以下规则中之一确定力矩的测量值中的至少两个测量值:
[0079][0080][0081][0082][0083][0084][0085][0086][0087][0088]
数学规则示出,存在各自足以测量力矩的磁场传感器的至少九个组合。第一组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器、第四磁场传感器、第五磁场传感器和第六磁场传感器。第二组合包括第一磁场传感器、第三磁场传感器、第四磁场传感器和第六磁场传感器。第三组合包括第二磁场传感器、第三磁场传感器、第四磁场传感器和第五磁场传感器。第四组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器和第四磁场传感器。第五组合包括第三磁场传感器、第四磁场传感器、第五磁场传感器和第六磁场传感器。第六组合包括第一磁场传感器和第四磁场传感器。第七组合包括第三磁场传感器和第
二磁场传感器。第八组合包括第三磁场传感器和第六磁场传感器。第九组合包括第四磁场传感器和第五磁场传感器。
[0089]
优选地,不仅确定两个,而是确定至少四个或更优选地所有九个测量值m1至m9。优选地,如在第一特别优选的实施方式和第二特别优选的实施方式中那样相应地确定测试信号t。
[0090]
在根据本发明的方法的第四特别优选的实施方式中,装置被设计成测量作用在转向柱上并且位于轴线内的力矩,即,扭转力矩。转向柱具有交替极性的三个磁化区域。轴向布置在外部的两个磁化区域各自具有与磁场传感器中的两个磁场传感器相同的轴向位置,其中,这两个磁场传感器具有相同的轴向位置并且相对于轴线彼此相对地布置。轴向中心磁化区域具有与磁场传感器中的四个磁场传感器相同的轴向位置,其中,这些磁场传感器中的两个磁场传感器直接彼此相邻布置并且形成对。由于该直接相邻的布置,两对中的每一对的磁场传感器具有基本相同的位置。具有相同轴向位置的两对相对于轴线彼此相对地布置。八个磁场传感器中的四个磁场传感器各自具有相同的切向位置并且轴向相邻。八个磁场传感器中的第一磁场传感器具有与轴向布置在外部的磁化区域中的一个磁化区域相同的轴向位置。第一磁场传感器输出测量信号a1。相对于轴线与第一磁场传感器相对并且具有与第一磁场传感器相同的轴向位置的磁场传感器形成第二磁场传感器,该第二磁场传感器输出测量信号a2。测量信号a1和a2表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1和a2表示符号不同的轴向方向分量。与第一磁场传感器轴向相邻并且具有与第一磁场传感器相同的周向位置的磁场传感器的对包括磁场传感器中的第三磁场传感器和第四磁场传感器,第三磁场传感器输出测量信号b
11
,第四磁场传感器输出测量信号b
12
。第三磁场传感器和第四磁场传感器具有与轴向中心磁化区域相同的轴向位置。测量信号a1、b
11
和b
12
表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号a1、b
11
和b
12
表示符号相同的轴向方向分量。相对于轴线与第三磁场传感器和第四磁场传感器相对并且具有与第三磁场传感器和第四磁场传感器相同的轴向位置的对包括磁场传感器中的第五磁场传感器和第六磁场传感器,第五磁场传感器输出测量信号b
21
,第六磁场传感器输出测量信号b
22
。测量信号b
11
和b
21
表示方向相反的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b
11
和b
21
表示符号不同的轴向方向分量。测量信号b
21
和b
22
表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b
21
和b
22
表示符号相同的轴向方向分量。与第三磁场传感器轴向相邻并且具有与第一磁场传感器、第三磁场传感器和第四磁场传感器相同的周向位置的磁场传感器形成磁场传感器中的第七磁场传感器,该第七磁场传感器输出测量信号c1。测量信号b
11
和c1表示方向相同的由于逆磁致伸缩效应而产生的磁场的轴向方向分量;即,测量信号b
11
和c1表示符号相同的轴向方向分量。关于轴线与第七磁场传感器相对并且具有与第七磁场传感器相同的轴向位置的磁场传感器形成磁场传感器中的第八磁场传感器,该第八磁场传感器输出测量信号c2。测量信号c1和c2表示方向相反的由于逆磁致伸缩效应而产生的磁场的方向分量;即,测量信号c1和c2表示符号不同的轴向方向分量。根据以下规则中之一确定力矩的测量值中的至少两个测量值:
[0091][0092][0093][0094][0095][0096][0097][0098][0099]
数学规则示出,存在足以测量力矩的磁场传感器的至少八个组合。第一组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器、第四磁场传感器、第五磁场传感器、第六磁场传感器、第七磁场传感器和第八磁场传感器。第二组合包括第一磁场传感器、第二磁场传感器、第三磁场传感器、第五磁场传感器、第七磁场传感器和第八磁场传感器。第三组合包括第一磁场传感器、第三磁场传感器、第五磁场传感器和第八磁场传感器。第四组合包括第三磁场传感器、第五磁场传感器、第七磁场传感器和第八磁场传感器。第五组合包括第一磁场传感器和第五磁场传感器。第六组合包括第三磁场传感器和第二磁场传感器。第七组合包括第三磁场传感器和第八磁场传感器。第八组合包括第五磁场传感器和第七磁场传感器。
[0100]
优选地,不仅确定两个,而是确定至少四个或更优选地所有八个测量值m1至m8。优选地,如在第一特别优选的实施方式和第二特别优选的实施方式中那样相应地确定测试信号t。
[0101]
所描述的四个特别优选的实施方式优选地还具有上述优选的特征。
[0102]
使用根据本发明的装置来测量作用在机动车辆的转向轴上的力矩。转向轴具有轴线和围绕轴线周向延伸的至少两个磁化区域,每个磁化区域用于一个磁化。装置包括至少四个磁场传感器,每个磁场传感器用于测量由磁化和力矩引起的磁场的轴向方向分量。分别存在磁场传感器中的至少两个磁场传感器的至少两个组合。这些组合中的每个组合足以测量力矩。装置还包括设计成执行根据本发明的方法的测量信号处理单元。测量信号处理单元优选地设计成执行根据本发明的方法的上述优选实施方式中的一个实施方式。另外,
装置优选地还具有结合根据本发明的方法所指示的特征。
[0103]
测量信号处理单元优选地由微控制器组成。在广义上,测量信号处理单元优选地由计算单元组成。
附图说明
[0104]
本发明的其他细节、优点和发展从下文参照附图对本发明的优选实施方式的描述中得出。在附图中:
[0105]
图1以两个视图示出了根据本发明的装置的第一优选实施方式;
[0106]
图2以两个视图示出了根据本发明的装置的第二优选实施方式;
[0107]
图3以两个视图示出了根据本发明的装置的第三优选实施方式;以及
[0108]
图4以两个视图示出了根据本发明的装置的第四优选实施方式。
具体实施方式
[0109]
图1以横向截面图和纵向截面图示出了根据本发明的装置的第一优选实施方式。装置包括机动车辆的转向轴01。转向轴01由钢制成并且延伸到轴线03中。扭转力矩m
t
作用在转向轴01上,该扭转力矩m
t
可以用根据本发明的装置测量。
[0110]
转向轴01具有呈周向轨道形式的两个磁化区域04。两个磁化区域04被永久磁化并且在相反方向上极化,这在每种情况下由示出旋转方向的箭头05示出。两个磁化区域04形成用于使用逆磁致伸缩效应测量扭转力矩m
t
的初级传感器。
[0111]
装置还包括四个磁场传感器06,这四个磁场传感器位于转向轴01附近。四个磁场传感器06位于距轴线03相同的距离处。
[0112]
四个磁场传感器06各自用于测量由于磁化区域04的磁化和由于逆磁致伸缩效应引起的扭转力矩m
t
而产生的磁场的轴向方向分量。该磁场的磁场方向在磁场传感器06的位置处由箭头07示出,该箭头示出了相应的磁场方向。磁场传感器06的正测量方向通过其中画有箭头的用于磁场传感器06的符号示出。
[0113]
四个磁场传感器06中的两个磁场传感器具有与磁化区域04中的第一磁化区域相同的轴向位置。四个磁场传感器06中的另外两个磁场传感器具有与磁化区域06中的第二磁化区域相同的轴向位置。
[0114]
四个磁场传感器06中的第一磁场传感器11输出信号a1。关于轴线03与第一磁场传感器11相对的磁场传感器06形成第二磁场传感器12,该第二磁场传感器输出信号a2。与第一磁场传感器11轴向相邻的磁场传感器06形成第三磁场传感器13,该第三磁场传感器输出信号b1。关于轴线03与第三磁场传感器13相对的磁场传感器06形成第四磁场传感器14,该第四磁场传感器输出信号b2。
[0115]
装置还包括微控制器(未示出),该微控制器用于测量信号处理并且被配置成执行根据本发明的用于检查装置的方法。
[0116]
图2以横向截面图和纵向截面图示出了根据本发明的装置的第二优选实施方式。该实施方式最初类似于图1中示出的实施方式。与图1中示出的第一实施方式相比,转向轴01具有交替极化的三个磁化区域04。四个磁场传感器06中的第一磁场传感器11又输出信号a1。第二磁场传感器12与第一磁场传感器11轴向相邻并且输出信号b1。第三磁场传感器13相
对于轴线03与第一磁场传感器11相对地布置并且输出信号b2。第四磁场传感器14与第三磁场传感器13轴向相邻并且输出信号c2。
[0117]
图3以横向截面图和纵向截面图示出了根据本发明的装置的第三优选实施方式。该实施方式最初与图2中示出的实施方式相同。与图2中示出的第二实施方式相比,装置包括六个磁场传感器06。六个磁场传感器06中的第一磁场传感器11又输出信号a1。第二磁场传感器12相对于轴线03与第一磁场传感器11相对地布置并且输出信号a2。第三磁场传感器13与第一磁场传感器11轴向相邻并且输出信号b1。第四磁场传感器14相对于轴线03与第三磁场传感器13相对地布置并且输出信号b2。六个磁场传感器06中的第五磁场传感器15与第三磁场传感器13轴向相邻并且输出信号c1。六个磁场传感器06中的第六磁场传感器16相对于轴线03与第五磁场传感器15相对地布置并且输出信号c2。
[0118]
图4以横向截面图和纵向截面图示出了根据本发明的装置的第四优选实施方式。该实施方式最初类似于图3中示出的实施方式。与图3中示出的第三实施方式相比,装置包括八个磁场传感器06。六个磁场传感器06中的第一磁场传感器11又输出信号a1。第二磁场传感器12相对于轴线03与第一磁场传感器11相对地布置并且输出信号a2。第三磁场传感器13与第一磁场传感器11轴向相邻并且输出信号b
11
。第四磁场传感器14与第三磁场传感器13直接相邻并且输出信号b
12
。第五磁场传感器15相对于轴线03与第三磁场传感器13相对地布置并且输出信号b
21
。第六磁场传感器16与第五磁场传感器13直接相邻并且输出信号b
22
。八个磁场传感器06中的第七磁场传感器17与第三磁场传感器13轴向相邻并且输出信号c1。六个磁场传感器06中的第八磁场传感器18相对于轴线03与第七磁场传感器17相对地布置并且输出信号c2。
[0119]
附图标记说明
[0120]
01转向轴 02
‑
03轴线 04磁化区域 05旋转方向 06磁场传感器 07磁场方向 08
‑
09
‑
10
‑
11第一磁场传感器 12第二磁场传感器 13第三磁场传感器 14第四磁场传感器 15第五磁场传感器 16第六磁场传感器 17第七磁场传感器 18第八磁场传感器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1