一种路面三维检测方法与流程
1.本发明涉及道路工程检测技术领域,具体是涉及一种路面三维检测方法。
背景技术:
2.随着我国交通事业的快速发展,公路通车里程数在急剧增加。其中,公路质量的好坏关系到车辆行驶的安全性、舒适性及运行费用,对道路行车安全具有重要影响,而评价公路质量好坏的方法就是对道路工程检测,道路工程检测在公路养护中占有十分重要的地位。
3.道路工程检测包括对路面三维纹理形貌的检测,以便于更好地评价和分析路面的抗滑特性、损坏程度以及平整度,现在用于检测路面纹理形貌的方法主要包括:铺砂法、环形形貌测试法和激光构造深度法等。其中,铺砂法效率低、重复性差,受人为因素影响大。而环形形貌测试法和激光构造深度法则由于测试分辨率有限,只能完成单个测点高程信息的检测,无法反映整个路面待测区域纹理形貌的波长分布及形状构造特性。
4.而如何能够准确且高效的构建路面的连续三维纹理形貌,就需要提供一种路面三维检测方法,以解决上述问题。
技术实现要素:
5.针对现有技术存在的不足,本发明实施例的目的在于提供一种路面三维检测方法,以解决上述背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:
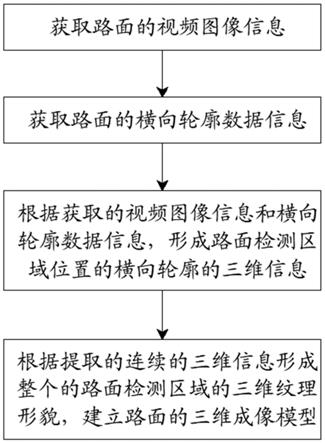
7.一种路面三维检测方法,包括以下步骤:
8.获取路面的视频图像信息;
9.获取路面的横向轮廓数据信息;
10.根据获取的视频图像信息和横向轮廓数据信息,形成路面检测区域位置的横向轮廓的三维信息;
11.根据提取的连续的三维信息形成整个的路面检测区域的三维纹理形貌,建立路面的三维成像模型。
12.作为本发明进一步的方案,在获取路面的视频图像信息以及横向轮廓数据信息前,还包括以下步骤:
13.将获取视频图像信息的图像采集设备以及横向轮廓数据信息的激光器安装于车体底部;
14.调试图像采集设备采集前方路面视频信息的边界范围;
15.调试激光器发出的光条覆盖横向路面,采用横向路面的横向轮廓数据信息;
16.在车体前方底部安装有用于拍摄光条图像的面阵ccd;
17.并将连接图像采集设备、激光器以及面阵ccd的处理系统安装于车内。
18.作为本发明进一步的方案,所述图像采集设备和激光器设置在车底,偏斜角度一
致,偏斜角度为15
°
、30
°
、45
°
、60
°
或75
°
。
19.作为本发明进一步的方案,所述激光器为线激光线,图像采集设备为双目摄像头,线激光线发出的光条覆盖于图像采集设备拍摄的边界范围内。
20.作为本发明进一步的方案,所述面阵ccd为单目面阵ccd或双目面阵ccd。
21.作为本发明进一步的方案,形成整个的路面检测区域的三维纹理形貌的步骤包括:
22.在车体行进中,线激光线发出的光条投射到待检测路面,光条覆盖横向路面的光条图像在面阵ccd上成像,处理系统获取路面横向轮廓数据信息;
23.双目摄像头拍摄行进中的前方路面视频信息,处理系统获取实时覆盖光条且连续的前方路面视频信息;
24.处理系统根据前方路面视频信息建立像平面坐标系,并依据面阵ccd的二维图像坐标系,计算路面光条位置的三维信息,得到路面光条位置的三维激光成像模型,并在路面视频信息上构建路面的连续三维纹理形貌。
25.作为本发明进一步的方案,所述处理系统由计算机及与计算机连接的数据采集模块组成,双目摄像头的输出端和面阵ccd的输出端连接数据采集模块的不同输入端,数据采集模块连接于计算机内部,线激光机的输入端连接计算机的输出端。
26.综上所述,本发明实施例与现有技术相比具有以下有益效果:
27.本发明的路面三维检测方法,其通过自动获取路面的路面图像和横向轮廓数据计算出路面光条位置的三维信息,进而构建路面的连续三维纹理形貌,三维检测结构完整准确,检测效率高,准确得到路面的三维特征参数。
28.为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
29.图1为发明提供的一种路面三维检测方法的系统框图。
30.图2为发明提供的一种路面三维检测方法的结构示意图。
31.图3为发明提供的一种路面三维检测方法的图像采集原理示意图。
具体实施方式
32.为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的首选实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本申请的公开内容更加透彻全面。
33.下面结合附图和具体实施例对本发明的技术方案做进一步的说明。
34.结合图1、图2和图3说明本实施方式,提供了一种路面三维检测方法,包括以下步骤:
35.获取路面的视频图像信息;
36.获取路面的横向轮廓数据信息;
37.根据获取的视频图像信息和横向轮廓数据信息,形成路面检测区域位置的横向轮廓的三维信息;
38.根据提取的连续的三维信息形成整个的路面检测区域的三维纹理形貌,建立路面的三维成像模型。
39.值得一提的是,在获取路面的视频图像信息以及横向轮廓数据信息前,还包括以下步骤:
40.将获取视频图像信息的图像采集设备以及横向轮廓数据信息的激光器安装于车体底部;
41.调试图像采集设备采集前方路面视频信息的边界范围;
42.调试激光器发出的光条覆盖横向路面,采用横向路面的横向轮廓数据信息;
43.在车体前方底部安装有用于拍摄光条图像的面阵ccd;
44.并将连接图像采集设备、激光器以及面阵ccd的处理系统安装于车内。
45.在将所述的图像采集设备和激光器设置在车底时,保证图像采集设备和激光器为同一偏斜角度安装,并且,保证激光器的横向光条位于图像采集设备的拍摄区域内,其中,图像采集设备和激光器的同一偏斜角度包括但不局限于15
°
、30
°
、45
°
、60
°
和75
°
。
46.在本发明的实施例中,所述激光器为线激光线,图像采集设备为双目摄像头,线激光线发出的光条覆盖于图像采集设备拍摄的边界范围内;在双目摄像头拍摄前方路面信息时,也可以利用其对车辆周边环境的拍摄信息用于驾驶辅助上。
47.在本发明的实施例中,所述面阵ccd为单目面阵ccd或双目面阵ccd,面阵ccd构成立体摄像头采集装置,用于拍摄激光器投射到路面处覆盖横向路面的光条图像。
48.值得一提的是,在本发明中,形成整个的路面检测区域的三维纹理形貌的步骤包括:
49.在车体行进中,线激光线发出的光条投射到待检测路面,光条覆盖横向路面的光条图像在面阵ccd上成像,处理系统获取路面横向轮廓数据信息;
50.双目摄像头拍摄行进中的前方路面视频信息,处理系统获取实时覆盖光条且连续的前方路面视频信息;
51.处理系统根据前方路面视频信息建立像平面坐标系,并依据面阵ccd的二维图像坐标系,计算路面光条位置的三维信息,得到路面光条位置的三维激光成像模型,并在路面视频信息上构建路面的连续三维纹理形貌。
52.在本发明的实施例中,所述处理系统由计算机及与计算机连接的数据采集模块组成,双目摄像头的输出端和面阵ccd的输出端连接数据采集模块的不同输入端,数据采集模块连接于计算机内部,线激光机的输入端连接计算机的输出端。
53.以上结合具体实施例描述了本发明的技术原理,仅是本发明的优选实施方式。本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1