光学传感装置的制作方法
1.本发明涉及一种光学传感装置,特别是有关一种用来检测目标容器的尺寸或其水位高度的光学传感装置。
背景技术:
2.传统饮水机不能侦测容器内的水面高度。使用者需目视观察容器,并且手动控制饮水机的出水按钮以避免液体溢出容器。传统咖啡机利用近接传感器或超声波传感器侦测容器是否放在出水口;然而,近接传感器与超声波传感器无法侦测容器的剩余容量和容器内的液面信息。因此,如何设计一种能利用光学检测技术侦测容器的剩余容量和容器内的液面信息以提高饮水机或咖啡机附加功能的液体检测装置,便为相关光学检测产业的发展目标之一。
技术实现要素:
3.本发明涉及一种用来检测目标容器的尺寸或其水位高度的光学传感装置。
4.本发明进一步公开一种光学传感装置,用来检测目标容器。该光学传感装置包括线光源、光学传感数组以及处理器。该线光源用来投射长条型照明光到该目标容器。该光学传感数组包括排列成长条状的多个传感单元,用来接收该目标容器反射生成的长条型侦测光。该处理器电连接该光学传感数组。该处理器分析该多个传感单元所接收该长条型侦测光的亮度分布,以取得该光学传感数组和该目标容器的杯缘之间的相对距离。
5.本发明还公开该长条型侦测光区分为多个区段,分别反射自该目标容器的多个区块,并且分别为该多个传感单元所接收,该处理器进一步分析该多个区段的亮度以计算该光学传感数组相对于该多个区段的距离变化,以取得该多个区块的轮廓。该处理器进一步分析该多个区块的该轮廓以取得该杯缘内的深度变化信息,并且根据该深度变化信息判断该目标容器内的液体是否具有多余对象。该距离变化为各区块与一对应传感单元之间的多个相对距离的组合。
6.本发明还公开该处理器将该亮度分布划分为具有最大亮度运算值的第一区域和具有最小亮度运算值的第二区域,并且分析该第一区域与该第二区域,以利用该杯缘与该目标容器所在承载面之间高度差判断该目标容器的高度。该处理器将该亮度分布划分为该第一区域、该第二区域和第三区域,该第三区域具有介于该最大亮度运算值与该最小亮度运算值之间的亮度运算值,该处理器进一步分析该第三区域,以利用该杯缘与该目标容器的基部之间的高度差判断该目标容器的剩余容量。
7.本发明还公开该处理器进一步分析该多个区段之间的亮度差异,找出光学参数异常的区段视为该目标容器的基部,以利用光学参数异常的该区段判断该目标容器的剩余容量。
8.本发明还公开该光学传感装置进一步包括记忆模块,电连接该处理器,用来储存多种液体的光学参数,该处理器进一步利用该亮度分布和该光学参数的分析与补偿,计算
出该光学传感数组与该目标容器内的该液体之间的相对距离。该处理器进一步分析该亮度分布转换产生的图像,利用该图像的几何中心信息判断该光学参数的数值范围,从而确认该液体的种类。该光学参数为反射率、折射率与吸收率的其中一个或多个。该目标容器的杯口为该杯缘所环绕并且指向该光学传感数组,该液体容置在该目标容器内并且通过该杯口外露。
9.本发明还公开该处理器进一步辨识该目标容器的该杯缘与基部,并且利用该光学传感数组与该杯缘之间的该相对距离计算该杯缘的口径。该光学传感数组相对于该杯缘的所在平面的垂直投射点视为对齐点,该处理器分析该光学传感数组的视角范围以取得该对齐点与该视角范围的边界之间的视野间距,并且利用该视野间距计算出该杯缘与该对齐点之间的杯缘间距,以相应取得该口径。
10.本发明还公开该光学传感装置进一步包括压力传感器,电连接该处理器,用来检测该目标容器的重量。该光学传感装置进一步包括压力传感器,电连接该处理器,用来检测该目标容器的重量。当该重量增加并且该目标容器内的该液体的该水位高度增加时,该处理器利用该光学传感数组的检测结果作为该液体的该水位高度,当该重量增加但该液体的该水位高度没有增加时,该处理器利用该压力传感器与该光学传感数组的检测结果作为该液体的该水位高度。
11.本发明还公开该线光源包括一个长条型发光单元,用来输出该长条型照明光。该线光源包括相邻排列的多个发光单元,用来输出该长条型照明光。该光学传感数组为mx1的数组,并且m为正整数,或者为mxn的数组,并且m与n都为正整数。
12.本发明还公开该光学传感装置进一步包括旋转马达,用来承托并且旋转该线光源或该目标容器,以使该线光源能够扫描该目标容器。或者,该光学传感装置进一步包括移动马达,用来承托并且移动该线光源或该目标容器,以使该线光源能够扫描该目标容器。
13.本发明还公开一种光学传感装置,用来检测目标容器。该光学传感装置包括光源、光学传感数组以及处理器。该光源投射照明光到该目标容器。该光学传感数组用来接收该目标容器反射生成的侦测光。该处理器电连接该光学传感数组。该处理器分析该侦测光的亮度分布找出两个或两个以上的第一亮度区域,并且根据该些第一亮度区域的间距取得该目标容器的径向尺寸。
14.本发明还公开一种光学传感装置,用来检测目标容器。该光学传感装置包括第一线光源、第二线光源、光学传感数组以及处理器。该第一线光源用来投射第一长条型照明光到该目标容器。该第二线光源用来投射方向不同于该第一长条型照明光的第二长条型照明光到该目标容器。该光学传感数组用来接收该目标容器反射生成的第一长条型侦测光与第二长条型侦测光。该处理器电连接该光学传感数组。该处理器分析该第一长条型侦测光与该第二长条型侦测光的亮度分布,以取得该目标容器和该光学传感数组之间的相对距离。
15.本发明的光学传感装置可利用线光源或点光源投射到目标容器与承载平面所拍摄取得的图像,判断出目标容器的高度与口径;若目标容器内液体的光学参数为已知,如折射率、反射率与吸收率等,还能再进一步利用光学参数进行补偿以计算出目标容器内的正确液体水位高度。除此之外,光学传感装置还能以压力传感器作为辅助,侦测目标容器内的注入液体的重量变化,再利用光学传感数组的像素数、与光学传感数组相对于目标容器杯缘的高度取得目标容器的口径,从而分析注入液体的增加重量与密度以及目标容器的口
径,计算出目标容器内的注入液体的水位高度。
16.光学传感装置可同时应用光学传感数组与压力传感器侦测目标容器内的液体。若光学传感装置侦测到注入液体的水位上升、并且目标容器的重量也增加,表示注入液体可能为深色或非透明(例如咖啡),此时致发光学传感数组即能测量到正确的注入液体的水位高度;若光学传感装置没有侦测到注入液体的水位上升、或侦测到注入液体的水位缓慢上升或非线性上升、但是目标容器的重量持续增加,表示注入液体可能为浅色或透明(例如水),这时就须进一步致发压力传感器,以辅助光学传感数组测量正确的注入液体的水位高度。相比于公知技术,本发明的光学传感装置可应用在饮水机、咖啡机或汽水机等机器,能够快速且精准地计算出目标容器内的注入液体的水位高度,有效预估机器出水量以防止注入液体溢出目标容器。
附图说明
17.图1为本发明实施例的光学传感装置的功能方块图。
18.图2为本发明实施例的光学传感装置的外观示意图。
19.图3与图4为本发明不同实施例的线光源的示意图。
20.图5为本发明实施例的光学传感装置与目标容器的部分放大示意图。
21.图6为本发明实施例的光学传感数组所取得图像的示意图。
22.图7为本发明实施例的图像转换生成的分布曲线的示意图。
23.图8为本发明另一实施例的光学传感装置与目标容器在侦测阶段的示意图。
24.图9与图10为本发明其他实施例的光学传感装置的示意图。
25.图11为本发明另一实施例的光学传感装置的功能方块图。
26.图12为本发明另一实施例的光学传感装置所取得图像的示意图。
27.图13为本发明另一实施例的图像转换生成的分布曲线的示意图。
28.图14为本发明另一实施例的光学传感装置与目标容器的示意图。
29.第15图与第16图为本发明实施例的光学传感数组针对不同液体所取得图像的示意图。
30.第17图为本发明另一实施例的图像转换生成的分布曲线的示意图。
31.第18图为本发明另一实施例的光学传感装置的功能方块图。
32.第19图与第20图为本发明另一实施例的光学传感装置侦测目标容器的示意图。
33.其中,附图标记说明如下:
34.10、10’、10”、10a、10b 光学传感装置
35.12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
目标容器
36.121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杯口
37.122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杯缘
38.14、14a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
线光源
39.141
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
条状发光单元
40.142
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个发光单元
41.16、16a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学传感数组
42.161
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感单元
43.18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
记忆模块
44.20、20a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
处理器
45.22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
压力传感器
46.24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转马达
47.26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移动马达
48.30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一线光源
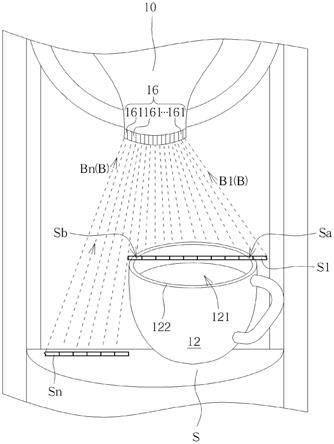
49.32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二线光源
50.34
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学传感数组
51.36
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
处理器
52.s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
承载平面
53.s1~sn
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区块
54.sa、sb
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区块
55.s1_1~s1_n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区块
56.s2_1~s2_n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区块
57.i、i1、i2、i
’ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图像
58.c、c
’ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
分布曲线
59.ca、cb
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对应点
60.r1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一区域
61.r2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二区域
62.r3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三区域
63.b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
长条型侦测光
64.b1~bn
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区段
65.p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对齐点
66.d1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一距离
67.d2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二距离
68.d3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三距离
69.g1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一差距
70.fov
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视角范围
71.w1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
目标容器宽度
72.w2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
液面宽度
73.a1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杯口
74.a2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杯底
75.a3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
液面
76.p1-1~p1-n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反射点
77.p2-1~p2-n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反射点
78.pi_1、pi_2、pi_3、pi_4
ꢀꢀꢀꢀ
交点
具体实施方式
79.请参阅图1与图2,图1为本发明实施例的光学传感装置10的功能方块图,图2为本
发明实施例的光学传感装置10的外观示意图。光学传感装置10可应用在饮水机或咖啡机等机器,不但能用来侦测目标容器12是否存在,还能够侦测目标容器12的尺寸、与目标容器12内注入液体的水位高度。光学传感装置10可包括线光源14、光学传感数组16、记忆模块18以及处理器20。线光源14、光学传感数组16与记忆模块18可电连接处理器20。记忆模块18则为光学传感装置10的非必要选择性配件。
80.请参阅图3与图4,图3与图4为本发明不同实施例的线光源14的示意图。如图3所示,线光源14可能具有单个条状发光单元141,用来产生及投射长条型照明光到目标容器12。如图4所示,线光源14还可能具有侧向排列的多个发光单元142,并且多个发光单元142分别输出小尺寸照明光,从而组合在一起形成长条型照明光以投射到目标容器12。长条型照明光的长度优选地可大于目标容器12的宽度,意即长条型照明光会同时照射到目标容器12以及目标容器12所在的承载平面s。
81.光学传感数组16可包括多个传感单元161,多个传感单元161排列成长条型以接收长条型侦测光。光学传感数组16可设计成mx1的数组,并且参数m为正整数,以配合长条型侦测光的光型;或者可稍微加宽光学传感数组16,设计成mxn的数组,此时参数m与n都为正整数。传感单元161的数量会依照承载平面s用来放置目标容器12的侦测区大小而定,意即目标容器12的可能尺寸越大,传感单元161的数量越多以扩大光学传感数组16的可侦测范围。光学传感数组16可用来接收长条型照明光投射到目标容器12所反射生成的长条型侦测光。处理器20可分析多个传感单元161产生的亮度分布,以取得光学传感数组16与目标容器12之间的相对距离。相对距离可进一步转换为目标容器12的尺寸(宽度与高度)、以及注入目标容器12的液体水位高度。
82.请参阅图5至图7,图5为本发明实施例的光学传感装置10与目标容器12的部分放大示意图,图6为本发明实施例的光学传感数组16所取得图像i的示意图,图7为本发明实施例的图像i转换生成的分布曲线c的示意图。在本发明的其中一个可能实施态样中,光学传感数组16接收长条型侦测光b之后,光学传感装置10可将长条型侦测光b划分为多个区段b1~bn,分别投射到目标容器12(和/或承载平面s)的多个区块s1~sn。每一个区段的亮度经解析能计算出光学传感数组16的各传感单元161与目标容器12(和/或承载平面s)的对应区块之间的相对距离;接下来,区段b1~bn所计算出的多个相对距离即能转换为目标容器12与承载平面s的轮廓。
83.如图5所示,目标容器12可具有杯口121,液体会通过杯口121注入目标容器12的内部空间。目标容器12的杯缘122围绕杯口121,并且杯口121面向光学传感数组16,以使光学传感数组16可取得涵盖杯缘121内外的图像i。当线光源14输出长条型照明光,目标容器12的杯缘122、杯口121内的液体、以及目标容器12所在的承载平面s会反射生成长条型侦测光b,并由光学传感数组16所接收;故光学传感装置10可取得光学传感数组16与目标容器12的杯缘122和杯口121内液体表面之间的相对距离、以及光学传感数组16与承载平面s之间的相对距离。
84.长条型侦测光b可分成多个区段b1~bn,每一个区段分别反射自目标容器12和/或承载平面s的多个区块s1~sn,并且分别为光学传感数组16的多个传感单元161所接收。光学传感装置10可分析多个传感单元161各自接收的区段b1~bn的亮度,以取得长条型侦测光b的亮度变化。如图7所示,若某区段具有高亮度,表示光学传感数组16与其对应区块之间
具有较短的相对距离,例如分布曲线c的波峰;若某区段具有低亮度,表示光学传感数组16与此对应区块之间具有较长的相对距离,例如分布曲线c的波谷。因此,光学传感数组16相对于多个区块s1~sn的距离变化可经计算而转换为区块s1~sn的轮廓。
85.分布曲线c可根据所有区段b1~bn的亮度运算值进行分类。所述的亮度运算值可以是分布曲线c的某区域的亮度均值或亮度中位数,其运算值的定义端视设计需求而定。举例来说,分布曲线c可划分为两个区域,例如第一区域r1与第二区域r2。第一区域r1可具有最大的亮度运算值,可视为对应到目标容器12的杯缘122。第二区域r2则具有最小的亮度运算值,可视为对应到承载平面s。光学传感装置10可分析第一区域r1与第二区域r2以计算出杯缘122与承载平面s的高度差,从而取得出目标容器12的高度。
86.此外,分布曲线c进一步还可划分成三个区域,例如第一区域r1、第二区域r2及第三区域r3。第三区域r3具有的亮度运算值会介于最大亮度运算值和最小亮度运算值之间;因此第三区域r3的位置落在第一区域r1的两个峰值之间,可对应到目标容器12的杯内基部。若目标容器12为空杯,所述基部是目标容器12的杯底;若目标容器12已注入液体,所述基部则是目标容器12内的液体表面。光学传感装置10可分析第一区域r1、第二区域r2与第三区域r3之间的差异,利用杯缘122和目标容器12的杯内基部的高度差,在已知目标容器12高度的条件下,计算出目标容器12的剩余容量。
87.再者,从图7可看出,分布曲线c的第一区域r1可涵盖两个波峰,可视为目标容器12的杯缘122的两相对区块。由于光学传感数组16的像素数量是已知参数,光学传感数组16所覆盖的承载平面的侦测区(用来放置目标容器12)的尺寸也是已知参数,故光学传感装置10可根据第一区域r1内的两波峰之间间隔的像素数量、和/或各波峰与图像i的相邻边界之间间隔的像素数量,推估出杯缘122的两相对区块(第一区域r1内的两个波峰)之间的距离,从而可取得目标容器12的口径,意即杯口121的尺寸。
88.除此之外,由于液体与目标容器12的内壁接触会产生表面张力,致使此区域的液体具有不同于其它区域液体的光学参数(例如反射率),故光学传感装置10可分析长条型侦测光b所对应的区块s1~sn之间的亮度差异,找出光学参数异常的区块sa与sb视为目标容器12的基部,意即液体表面;然后,在分布曲线c找出关联于区块sa与sb的对应点ca及cb,从而根据杯缘122和目标容器12基部的高度差、或是光学传感数组16相对承载平面s的高度与光学传感数组16相对目标容器12基部的高度之间差异,判断目标容器12的剩余容量。
89.光学传感装置10进一步还能将已知液体的光学参数储存在记忆模块18。已知液体可能是清水、咖啡、或气泡饮料。光学参数则为反射率、折射率与吸收率等。如果目标容器12里面装咖啡,长条型侦测光b的反射率较高,光学传感装置10能正确侦测到目标容器12内的液体水位高度。如果目标容器12里面装的是清水,长条型侦测光b的反射率较低,光学传感装置10侦测到的液体水位高度会有误差;此时,光学传感装置10便可利用记忆模块18内预先储存的光学参数补偿亮度分布的分析结果,以正确计算出光学传感数组16与目标容器12内液体的相对距离,从而取得目标容器12内正确的液体水位高度。
90.或者,记忆模块18还可储存已知液体在侦测图像里的几何中心分布信息,以使光学传感装置10能够分析光学传感数组16所取得亮度分布来辨认液体的种类。请参阅第15图与第16图,第15图与第16图为本发明实施例的光学传感数组16针对不同液体所取得图像i1及i2的示意图。如第15图所示,图像i1为目标容器12内注入深色液体,例如咖啡,所拍摄的
信息,故杯口121内范围的明亮区只分布在杯缘122旁侧。如第16图所示,图像i2为目标容器12内注入透明液体,例如清水,所拍摄的信息,而杯口121内范围的明亮区会分布在杯口121中央及杯缘122旁侧。因此,光学传感装置10可分析图像i1与i2的明亮区的几何中心信息,并且根据记忆模块18的储存信息,判断侦测所得的几何中心信息会对应到数值范围为何的光学参数,意即判断目标容器12内的液体属于暗色系的咖啡或是透明的清水,从而确认液体种类。几何中心信息可为质心、形心或重心等,然实际应用不限于此。
91.另外,请参阅第7图与第17图,第17图为本发明另一实施例的图像i’转换生成的分布曲线c’的示意图。如第7图所示,分布曲线c在第三区域r3内的曲线平滑,表示目标容器12内液体的液面平整;如第17图所示,分布曲线c’在第三区域r3内的曲线崎岖,表示目标容器12内的液体表面有明显高低起伏。因此,光学传感装置10可分析分布曲线c与c’以取得区块s1~sn的亮度分布所代表的轮廓,并且将其转换为杯缘122内的深度变化信息。若杯缘122内的深度变化幅度极小,表示目标容器12内只注入液体;若杯缘122内的深度变化幅度很大,表示目标容器12内除了液体,还可能具有多余对象。举例来说,多余对象可能是漂浮物,例如冰块或方糖;或者,多余对象可能是非漂浮物,例如搅拌棒或汤匙。
92.请参阅图6与图8,图8为本发明另一实施例的光学传感装置10与目标容器12在侦测阶段的示意图。在另一可能实施态样中,光学传感装置10取得图像i后,可先根据亮度分布从图像i辨识出目标容器12的杯缘122与承载平面s所在区域;例如具有最大亮度运算值的第一区域r1可视为杯缘122,具有最小亮度运算值的第二区域r2可视为承载平面s。接着,光学传感装置10还可在杯缘122所在范围内定义一个对齐点p,对齐点p为光学传感数组16相对于杯缘122平面的垂直投射点。
93.对齐点p相对于杯缘122的左侧具有第一距离d1,对齐点p相对于杯缘122的右侧具有第二距离d2;意即对齐点p相对于杯缘122的两侧的杯缘间距作为第一与第二距离d1及d2。光学传感装置10若没有指向目标容器12的正中央,第一距离d1会不同于第二距离d2。找到对齐点p之后,光学传感装置10可先从记忆模块18取得光学传感数组16的视角范围的角度值fov,然后计算光学传感数组16相对于杯缘122内对齐点p的第三距离d3,再利用三角函数公式以视角范围值fov与第三距离d3计算出对齐点p相对于视角范围左侧边界或右侧边界的第一差距g1。本实施例计算对齐点p相对于视角范围左侧边界的视野间距作为第一差距g1,如公式一,然实际应用不以此为限。
[0094][0095]
接下来,光学传感装置10可取得图像i内的对齐点p到杯缘122左侧之间间隔的第一像素数n1、对齐点p到杯缘122右侧之间间隔的第二像素数n2、以及对齐点p到视角范围左侧边界之间间隔的第三像素数n3。然后,光学传感装置10便能利用第一差距g1、第一像素数n1与第三像素数n3计算出第一距离d1,如公式二;再利用第一差距g1、第二像素数n2与第三像素数n3计算出第二距离d2,如公式三。而目标容器12的杯口121尺寸,例如杯缘122的左侧及右侧的间距,即为第一距离d1与第二距离d2的总和。
[0096]
[0097][0098]
光学传感装置10侦测到目标容器12的存在、并且计算出目标容器12的高度与口径后,还能进一步利用压力传感器22侦测目标容器12及其注入液体的重量。压力传感器22可设置在承载平面s,并且电连接处理器20。当目标容器12刚放上承载平面s时,目标容器12尚未注入液体,压力传感器22可侦测及取得目标容器12的空瓶重量。随着饮水机或咖啡机持续注入液体到目标容器12,压力传感器22可侦测且取得注入液体的增加重量。因为光学传感装置10被安装到饮水机、咖啡机或汽水机的机器类型属于已知信息,故可在记忆模块18内预先储存液体的性质参数,例如液体密度。这样一来,光学传感装置10可分析目标容器12的口径dt、注入液体的密度dw、以及注入液体的增加重量wl,计算出目标容器12内的注入液体的水位高度hl,如公式四。
[0099][0100]
请参阅图9与图10,图9与图10为本发明其他实施例的光学传感装置10’与10”的示意图。在这两个实施例中,与前述实施例具有相同编号的组件具有相同的构造与功能,于此不再重复说明。如图9所示实施例,光学传感装置10’可进一步具有旋转马达24。旋转马达24可用来承托线光源14、或是目标容器12的承载台;只要设置在线光源14与目标容器12承载台的其中之一或两者都可。承载台没有绘制在图式中,为设置在承载平面s以用来承托目标容器12的组件。旋转马达24可旋转线光源14或是目标容器12,让长条型照明光与长条型侦测光能够完整扫描目标容器12。如图10所示实施例,光学传感装置10”可进一步具有移动马达26,承托线光源14与目标容器12承载台的其中之一或两者,用来移动线光源14或目标容器12以完整扫描目标容器12。
[0101]
请参阅图11至图14,图11为本发明另一实施例的光学传感装置10a的功能方块图。图12为本发明另一实施例的光学传感装置10a所取得图像i’的示意图,图13为本发明另一实施例的图像i’转换生成的分布曲线c’的示意图,图14为本发明另一实施例的光学传感装置10a与目标容器12的示意图。光学传感装置10a可用来侦测目标容器12的尺寸。光学传感装置10a可包括光源14a、光学传感数组16a以及处理器20a。光学传感装置10a也可选择性包括记忆模块,其应用如前揭实施态样所述,故此不再重复说明。
[0102]
光源14a可能是投射长条型照明光到目标容器12的线光源、也可以是投射发散型照明光到目标容器12的点光源。光学传感数组16a可接收目标容器12反射生成的侦测光,侦测光之型态则对应于光源14a的投射光型。
[0103]
处理器20a可电连接光学传感数组16a。处理器20a可分析侦测光的亮度分布找出两个或两个以上的特定亮度区域,并且根据该些特定亮度区域的间距取得目标容器12的径向尺寸。举例来说,若光源14a为点光源并且目标容器12为圆杯,光学传感装置10a取得的图像i’会具有圆形图案。由于目标容器12的杯口a1与光学传感装置10a的距离较短、并且光源14a输出的侦测光会在目标容器12的杯口a1散射产生围成一圈的具有特定亮度的多个反射点p1-1~p1-n(意即前述的特定亮度区域),故处理器20a可分析多个反射点p1-1~p1-n的相对位置以取得目标容器12的宽度w1(意即前述的径向尺寸)。
[0104]
若光源14a为线光源并且目标容器12为圆杯,光学传感装置10a所取得图像转换形
成的分布曲线会因目标容器12的杯口a1的左右相对两侧的散射产生具有特定亮度的两个反射点(未示于附图),处理器20a可分析这两个反射点的间距来取得目标容器12的宽度w1(意即前述的径向尺寸)。
[0105]
请再参阅图12至图14,图像i’可具有径向尺寸较大的外圆图案、以及径向尺寸较小的内圆图案。外圆图案由具有第一亮度的多个反射点p1-1~p1-n组成,可反映目标容器12在第一高度(意即杯口a1位置)的宽度w1。内圆图案可由具有第二亮度的多个反射点p2-1~p2-n组成。若目标容器12没有注入液体,可判断光源14a输出的侦测光在目标容器12的杯底a2散射而产生反射点p2-1~p2-n;若目标容器12内具有液体,可判断光源14a输出的侦测光在目标容器12内的液面a3散射而产生反射点p2-1~p2-n。处理器20a可分析反射点p2-1~p2-n的相对位置以取得目标容器12的杯底a2或是液面a3的宽度w2。
[0106]
换句话说,多个反射点p2-1~p2-n反映目标容器12在第二高度(例如杯底a2或液面a3所在位置)的宽度w2。杯底a2(或液面a3)与光学传感装置10a之间的距离长于目标容器12的杯口a1与光学传感装置10a之间的距离,反射点p2-1~p2-n的第二亮度可高于目标容器12的杯壁反射亮度、但是低于反射点p1-1~p1-n在杯口a的第一亮度。因此,处理器20a可分析图像i’的内圆图案与外圆图案、和/或相应的分布曲线c,快速辨识出目标容器12的杯口a1、杯底a2和/或液面a3的位置及其宽度。
[0107]
请参阅第18图至第20图,第18图为本发明另一实施例的光学传感装置10b的功能方块图,第19图与第20图为本发明另一实施例的光学传感装置10b侦测目标容器12的示意图。光学传感装置10b可包括第一线光源30、第二线光源32、光学传感数组34以及处理器36。第一线光源30与第二线光源32可分别投射第一长条型照明光和第二长条型照明光到目标容器12,目标容器12与承载平面s会反射生成第一长条型侦测光和第二长条型侦测光,并且分别为光学传感数组34所接收。第一长条型侦测光的各区段分别反射自目标容器12和/或承载平面s的多个区块s1_1~s1_n,第二长条型侦测光的各区段分别反射自目标容器12和/或承载平面s的多个区块s2_1~s2_n。
[0108]
光学传感数组34可为mxn的数组,并且参数m与n都为正整数;然实际应用可不限于此。处理器36可电连接光学传感数组34。处理器36可分析第一长条型侦测光与第二长条型侦测光在目标容器12和/或承载平面s的亮度分布,取得目标容器12和光学传感数组34之间的相对距离。第一长条型侦测光可在目标容器12的杯缘122形成两个交点pi_1与pi_2,第二长条型侦测光在则在目标容器12的杯缘122形成两个交点pi_3与pi_4。处理器36可计算交点pi_1与pi_2的间距、以及交点pi_3与pi_4的间距,从而判断目标容器12与光学传感数组34之间的相对距离。
[0109]
如第19图所示,交点pi_1与pi_2的间距大于交点pi_3与pi_4的间距,并且交点pi_3与pi_4较为靠近交点pi_1与pi_2的其中之一,例如靠近交点pi_2但是远离交点pi_1,此时可判定目标容器12没有放在光学传感数组34的正下方。如第20图所示,交点pi_1与pi_2的间距相等或近似于交点pi_3与pi_4的间距,并且交点pi_3与pi_4的虚拟连接线位于交点pi_1与pi_2的中央处,可判定目标容器12放在光学传感数组34的正下方。根据前揭判定结果,光学传感装置10b还可进一步发出对应的提示信息,例如提醒是否需调整目标容器12的位置,确保机台能将液体正确注入目标容器12而不致外漏。
[0110]
本发明的光学传感装置可利用线光源或点光源投射到目标容器与承载平面所拍
摄取得的图像,判断出目标容器的高度与口径;若目标容器内液体的光学参数为已知,如折射率、反射率与吸收率等,还能再进一步利用光学参数进行补偿以计算出目标容器内的正确液体水位高度。除此之外,光学传感装置还能以压力传感器作为辅助,侦测目标容器内的注入液体的重量变化,再利用光学传感数组的像素数、与光学传感数组相对于目标容器杯缘的高度取得目标容器的口径,从而分析注入液体的增加重量与密度以及目标容器的口径,计算出目标容器内的注入液体的水位高度。
[0111]
综合上述几种实施态样,光学传感装置可同时应用光学传感数组与压力传感器侦测目标容器内的液体。若光学传感装置侦测到注入液体的水位上升、并且目标容器的重量也增加,表示注入液体可能为深色或非透明(例如咖啡),此时致发光学传感数组即能测量到正确的注入液体的水位高度;若光学传感装置没有侦测到注入液体的水位上升、或侦测到注入液体的水位缓慢上升或非线性上升、但是目标容器的重量持续增加,表示注入液体可能为浅色或透明(例如水),这时就须进一步致发压力传感器,以辅助光学传感数组测量正确的注入液体的水位高度。相比于公知技术,本发明的光学传感装置可应用在饮水机、咖啡机或汽水机等机器,能够快速且精准地计算出目标容器内的注入液体的水位高度,有效预估机器出水量以防止注入液体溢出目标容器。
[0112]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1