用于激光雷达传感器的不透明清洁液的制作方法
用于激光雷达传感器的不透明清洁液
背景技术:
1.各种类型的交通工具,例如汽车、卡车、摩托车、公共汽车、船、飞机、直升机、割草机、休闲车、游乐园车、农用设备、建筑设备、电车、高尔夫球车、火车、手推车等,均可配备各种类型的传感器,以检测车辆环境中的对象。例如,诸如自动驾驶车辆之类的车辆可能包括此类激光雷达、雷达、声纳、摄像机或其他此类成像传感器,它们可以扫描并记录车辆环境中的数据。来自这些传感器中的一个或多个的传感器数据可用于检测对象及其各自的特征(位置、形状、航向、速度等)。
2.然而,这些车辆经常受到诸如雨、雪、污垢等的环境因素的影响,这些环境因素可能导致这些传感器上的碎屑和污染物积聚。通常,传感器包括外壳,以保护传感器的内部传感器组件免受碎屑和污染物的侵害,但是随着时间的推移,外壳本身可能变脏。这样,由于内部传感器组件发送和接收的信号被碎屑和污染物阻挡,因此传感器组件的功能可能会受到阻碍。
技术实现要素:
3.本公开的一个方面提供了一种用于清洁lidar传感器的系统。该系统包括lidar传感器。激光雷达传感器具有外壳和容纳在外壳内的内部传感器组件。外壳包括光可以穿过的传感器输入表面,其中,内部传感器组件被配置为产生特定波长的光。该系统还包括对特定波长不透明的清洁液,使得当清洁液被施加到传感器输入表面时,清洁液吸收特定波长的光。
4.在一个示例中,清洁液被配置为降低特定波长的光穿过清洁液导致串扰伪像的可能性。在另一个示例中,内部传感器组件还包括多个接收器,并且其中,清洁液的反射光降低了在多个接收器中的另一个接收光的反射部分的可能性。在另一个示例中,清洁液在可见光光谱中是不透明的。在该示例中,清洁液包括食用色素。在另一个示例中,所述清洁液在可见光光谱中是透明的。在另一个示例中,清洁液包括对于所述特定波长不透明的颜料。在另一个示例中,该系统还包括车辆,并且lidar传感器附接到车辆。在该示例中,车辆被配置为当车辆以自动驾驶模式操作时,使用由lidar传感器生成的传感器数据来为车辆做出驾驶决策。在另一个示例中,清洁液被配置为与传感器输入表面上的异物碎屑混合。
5.本公开的另一方面提供了一种用于清洁lidar传感器的方法。lidar传感器包括外壳和容纳在外壳内的内部传感器组件。外壳包括光可以穿过的传感器输入表面,并且内部传感器组件被配置为产生特定波长的光。该方法包括将清洁液施加到传感器输入表面,其中清洁液被配置为对于特定波长是不透明的,并且使用施加的清洁液吸收特定波长的光。
6.在一个示例中,该方法还包括使用施加的清洁液来降低特定波长的光穿过清洁液导致串扰伪像的可能性。在另一个示例中,内部传感器组件还包括多个接收器,并且该方法还包括使用施加的清洁液来降低在多个接收器中的另一个接收光的反射部分的可能性。在另一个示例中,施加的清洁液在可见光光谱中是不透明的。在该示例中,施加的清洁液包括食用色素。在另一个示例中,施加的清洁液在可见光光谱中是透明的。在另一个示例中,施
加的清洁液包括对于特定波长不透明的颜料。在另一示例中,该方法还包括当车辆以自动驾驶模式操作时,使用由lidar传感器生成的传感器数据来为车辆做出驾驶决策。在另一个示例中,该方法还包括将施加的清洁液与传感器输入表面上的异物碎屑混合。
7.本公开的另一方面提供了一种车辆。该车辆包括lidar传感器。lidar传感器包括外壳和容纳在外壳内的内部传感器组件。外壳包括光可以穿过的传感器输入表面,其中,内部传感器组件被配置为产生特定波长的光。车辆还包括一个或多个处理器,被配置为基于由lidar传感器生成的传感器数据以自动驾驶模式控制车辆,和对特定波长不透明的清洁液,使得当清洁液被施加到传感器输入表面时,清洁液吸收特定波长的光。
附图说明
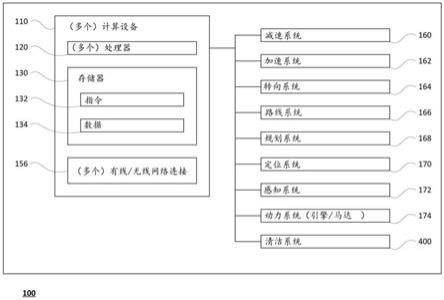
8.图1是根据本公开的方面的示例车辆的功能图。
9.图2是根据本公开的方面的车辆的示例外部视图。
10.图3是根据本公开的方面的传感器的示例功能表示。
11.图4是根据本公开的方面的传感器和清洁系统的示例功能表示。
12.图5a
‑
5f是根据本公开的方面的在操作中传感器的各方面的示例表示。
13.图6a
‑
6g是根据本公开的方面的在操作中传感器的各方面的示例表示。
14.图7是根据本公开的方面的示例流程图。
15.图8a至图8f是根据本公开的方面的在操作中传感器的各方面的示例表示。
具体实施方式
16.概述
17.该技术涉及例如用于自动驾驶车辆或其他用途的激光雷达(light detection and ranging,lidar)传感器的清洁。lidar传感器可以通过在特定方向上产生特定波长或波长范围的光脉冲来起作用。光可能会从对象表面反射出去,并返回到lidar传感器。返回光穿过传感器输入表面或传感器外壳(例如玻璃、塑料或其他材料)的孔,并经由一系列透镜、反光镜和/或波导被导引回一个或多个接收器。返回光可以用于确定对象表面的位置和反射率。该数据可以被认为是lidar传感器数据点。可以使用来自lidar传感器的数据生成lidar传感器数据点点云或点组。
18.lidar传感器可在多种条件下使用,包括水和其他异物碎屑会接触lidar传感器的外孔或传感器输入表面的条件。水滴和其他异物碎屑能够改变返回光的特性。例如,它们可能导致返回光被导向错误的内部接收器。这可能会导致“串扰伪像”或场景中实际上不存在但由于相互靠近的内部接收器检测到的光而出现的伪像,并且可以在产生许多不同方向的光的lidar传感器中放大。通常会在将大量光反射回lidar传感器的对象周围发现此类伪像,例如法向入射的后向反射镜或镜面反射镜,其放大杂散光路对lidar传感器的不正确接收器的影响。
19.在某些情况下,真实对象通常可以位于点云中看到的这些串扰伪像之内。另外,串扰伪像会导致其他信号丢失,因为lidar传感器可能会在接收来自较远场景中实际对象的光之前被伪像信号饱和。
20.用于清洁传感器孔的典型方法可能涉及利用清洁液,包括水、酒精和其他物质。但
是,这些液体本身在未经空气、擦拭器或时间等彻底清除时,可能会加剧问题。
21.为了解决这些问题,可以将用于清洁lidar传感器的孔的清洁液选择为对于由lidar传感器产生的光的波长或波长范围是不透明的,或者更确切地说,工作波长或波长范围。可以将不同类型的液体和颜料添加到典型的清洁液中,以使清洁液对于lidar传感器产生的光的波长或波长范围不透明。
22.清洁液可被保存在储液器中。必要时,可通过管线或其他管道将液体从储液器中抽出,直到其到达喷嘴。喷嘴可将清洁液的喷雾引向lidar传感器的孔。然后可以通过传感器的旋转或其他运动、吹气和/或一个或多个擦拭器来清洁有清洁液的孔。
23.就此而言,由于清洁而残留的任何水滴对于lidar传感器的工作波长或波长范围也可能是不透明的。这样,碰撞清洁液(或与清洁液混合的液滴)的任何对于波长或波长范围不透明并且否则会以错误的方向散射并被设置在错误的接收器上的光,可以被清洁液吸收。这可以降低串扰伪像的可能性,从而提高lidar传感器的串扰性能。尽管由于清洁后留在孔上的清洁液的残留物可能会影响lidar传感器的测距性能,从而可能阻挡一些返回光到达接收器,但这可以与串扰伪像方面的改进相平衡。
24.示例系统
25.如图1所示,根据本公开的一个方面的车辆100包括各种组件。尽管本公开的某些方面对于特定类型的车辆特别有用,但是该车辆可以是任何类型的车辆,包括但不限于汽车、卡车、摩托车、公共汽车、休闲车等。该车辆可以具有一个或多个计算设备,例如包含一个或多个处理器120、存储器130和在通用计算设备中通常存在的其他组件的计算设备110。
26.存储器130存储由一个或多个处理器120可访问的信息,包括可由处理器120执行或以其他方式使用的指令132和数据134。存储器130可以是能够存储处理器可访问信息的任何类型,包括计算设备可读介质或其他可以存储可借助电子设备读取的数据的介质,例如硬盘驱动器、存储卡、rom、ram、dvd或其他光盘,以及其他可写和只读存储器。系统和方法可以包括前述的不同组合,由此指令和数据的不同部分被存储在不同类型的介质上。
27.指令132可以是待由处理器直接执行(例如,机器代码)或间接执行(例如,脚本)的任何指令集。例如,指令可以作为计算设备代码存储在计算设备可读介质上。就此而言,术语“指令”和“程序”在本文中可以互换使用。指令可以以目标代码格式存储以供处理器直接处理,或者以任何其他计算设备语言存储,该计算设备语言包括按需解释或预先编译的脚本或独立源代码模块的集合。以下将详细解释指令的功能、方法和例程。
28.数据134可以由处理器120根据指令132进行检索、存储或修改。作为示例,存储器130的数据134可以存储预定义的场景。给定场景可以识别一组场景要求,包括对象的类型、对象相对于车辆的位置范围、以及其他因素,例如自动驾驶车辆是否能够围绕对象操纵、对象是否正在使用转向灯、与对象当前位置相关的交通灯的状态、对象是否正在接近停车标志等。要求可能包括离散值,例如“右转向灯打开”或“在仅右转车道上”,或例如“具有朝向与车辆100的当前路径偏移20度至60度的角度的航向”之类的值范围。在一些示例中,预定场景可以包括针对多个对象的类似信息。
29.一个或多个处理器120可以是任何常规处理器,例如可商购获得的cpu。替代地,一个或多个处理器可以是专用设备,诸如asic或其他基于硬件的处理器。尽管图1在功能上将处理器、存储器和计算设备110的其他元件示出为在同一块内,但是本领域普通技术人员将
理解,处理器、计算设备或存储器实际上可以包括可能会或可能不会存储在同一物理外壳内的多个处理器、计算设备或存储器。作为一个示例,内部电子显示器152可以由具有其自身处理器或中央处理单元(cpu)、存储器等的专用计算设备控制,该专用计算设备可以经由高带宽或其他网络连接与计算设备110对接。在一些示例中,该计算设备可以是可与用户的客户端设备通信的用户界面计算设备。类似地,存储器可以是位于不同于计算设备110外壳的外壳中的硬盘驱动器或其他存储介质。因此,对处理器或计算设备的引用将被理解为包括对可能并行操作或可能不并行操作的处理器或计算设备或存储器的集合的引用。
30.计算设备110可以包括通常与计算设备(例如,上述处理器和存储器)以及用户输入150(例如,鼠标、键盘、触摸屏和/或麦克风)以及各种电子显示器(例如,具有屏幕的监视器或可操作用于显示信息的任何其他电子设备)连接使用的所有组件。车辆还可以包括一个或多个有线和/或无线网络连接156,以便利与远离车辆的设备和/或在车辆的各种系统之间的通信。
31.作为示例,计算设备110可以与减速系统160和加速系统162交互以便控制车辆的速度。类似地,转向系统164可以由计算设备110使用,以控制车辆100的方向。例如,如果将车辆100配置为在道路上使用,例如汽车或卡车,则转向系统可以包括组件来控制车轮的角度以使车辆转弯。
32.计算设备110可以使用规划系统168,以便确定并遵循由路线系统166生成的到某个位置的路线。例如,路线系统166可以使用地图信息来确定从车辆的当前位置到下车位置的路线。规划系统168可以周期性地生成轨迹或短期规划,用于未来的一段时间内控制车辆,以便遵循到达目的地的路线(车辆的当前路线)。就此而言,规划系统168、路线系统166和/或数据134可以存储详细的地图信息,例如,高度详细的地图,其识别道路、车道线、十字路口、人行横道、限速、交通信号、建筑物、标志、实时交通信息、植被或其他此类对象和信息的形状和高度。另外,地图信息可以识别区域类型,例如建筑区域、学校区域、住宅区、停车场等。
33.地图信息可以包括诸如道路、车道、十字路口、以及这些可由路段表示的特征之间连接的信息的一个或多个道路图或图形网络。每个特征都可以存储为图形数据,并且可以与诸如地理位置及其是否链接到其他相关特征(例如,停车标志可以链接到道路和十字路口等)的信息相关联。在一些示例中,相关联的数据可以包括道路图的基于网格的索引,以允许高效地查找某些道路图特征。虽然地图信息可以是基于图像的地图,但是地图信息不必完全基于图像(例如,栅格)。例如,地图信息可以包括诸如道路、车道、十字路口、以及这些可由路段表示的特征之间连接的信息的一个或多个道路图或图形网络。每个特征都可以存储为图形数据,并且可以与诸如地理位置及其是否链接到其他相关特征(例如,停车标志可以链接到道路和十字路口等)的信息相关联。在一些示例中,相关联的数据可以包括道路图的基于网格的索引,以允许高效地查找某些道路图特征。
34.计算设备110可以使用定位系统170,以便确定车辆在地图上和/或地球上的相对位置或绝对位置。定位系统170还可包括gps接收器,以确定设备相对于地球的纬度、经度和/或高度位置。其他定位系统(例如,基于激光的定位系统、惯性辅助gps或基于摄像机的定位)也可以用于识别车辆的位置。车辆的位置可以包括绝对地理位置信息,例如纬度、经度和海拔,以及相对位置信息,例如相对于紧接其周围的其他汽车的位置,其通常可以用比
绝对地理位置更少的噪声来确定。
35.定位系统170还可以包括与计算设备110的计算设备通信的其他设备,例如加速度计、陀螺仪或另一方向/速度检测设备,以确定车辆的方向和速度或其变化。仅作为示例,加速设备可以确定其相对于重力方向或垂直于其的平面的俯仰、偏航或滚转(或其变化)。设备还可以追踪速度的增加或减少以及这种变化的方向。如本文所述设备提供的位置和方位数据可以被自动地提供给计算设备110、其他计算设备及其组合。
36.感知系统172还包括一个或多个组件,用于检测车辆外部的对象,例如其他车辆、道路上的障碍物、交通信号、标志、树木等。例如,感知系统172可以包括激光器、声纳、雷达、摄像机和/或记录数据的任何其他检测设备,该记录数据可以由计算设备110的计算设备处理。在车辆是诸如小型货车的乘用车的情况下,小型货车可以包括安装在车顶或其他适宜位置的激光或其他传感器。
37.例如,图2是车辆100的示例外部视图。在该示例中,车顶外壳210、212、214可以包括lidar传感器以及各种摄像机和雷达单元。另外,位于车辆100前端的外壳220和在车辆驾驶员侧和乘客侧的外壳230、232可以分别存放lidar传感器。例如,外壳230位于门250、252的前面。车辆100还包括用于同样位于车辆100的车顶的雷达单元和/或摄像机的外壳240、242。附加雷达单元和摄像机(未示出)可以位于车辆100的前端和后端和/或沿车顶或车顶外壳210的其他位置。
38.计算设备110可以能够与车辆的各种组件进行通信,以便根据计算设备110的存储器的主要车辆控制代码来控制车辆100的运动。例如,返回图1,计算设备110可以包括与车辆100的各种系统通信的各种计算设备,例如减速系统160、加速系统162、转向系统164、路线系统166、规划系统168、定位系统170、感知系统172和动力系统174(即,车辆的引擎或马达),以便根据存储器130的指令132控制车辆100的运动、速度等。
39.车辆的各种系统可以使用自动驾驶车辆控制软件来起作用,以便确定如何控制并控制车辆。作为示例,感知系统172的感知系统软件模块可以使用由自动驾驶车辆的一个或多个传感器(例如摄像机、lidar传感器、雷达单元、声纳单元等)生成的传感器数据来检测和识别对象及其特征。该特征可以包括位置、类型、航向、方向、速度、加速度、加速度的变化、尺寸、形状等。在某些情况下,可以将特征输入到行为预测系统软件模块中,该模块使用基于对象类型的各种行为模型,以输出检测到的对象的预测的未来行为。
40.在其他情况下,可以将特征放入一个或多个检测系统软件模块中,例如配置为检测已知交通信号状态的交通信号灯检测系统软件模块、配置为检测校车的校车检测系统软件模块、配置为检测建筑区域的建筑区域检测系统软件模块、配置为检测指挥交通的一个或多个人(例如,行人)的检测系统软件模块、配置为检测交通事故的交通事故检测系统软件模块、配置为检测紧急车辆的紧急车辆检测系统等。这些检测系统软件模块中的每一个可以将由感知系统172和/或一个或多个传感器生成的传感器数据(并且在某些情况下,车辆周围区域的地图信息)输入到各种模型中,该模型可以分别输出某个交通信号灯状态的可能性、对象是校车的可能性、建筑区域的面积、对象是指挥交通的人员的可能性、交通事故的区域、对象是紧急车辆的可能性等。
41.可以将检测到的对象、预测的未来行为、来自检测系统软件模块的各种可能性、识别车辆环境的地图信息、来自识别车辆位置和方向的定位系统170的位置信息、车辆的目的
地以及来自车辆的各种其他系统的反馈输入到规划系统168的规划系统软件模块中。规划系统可以使用该输入基于由路线系统166的路线模块生成的车辆的当前路线来生成车辆在未来的某个短暂时间段内要遵循的轨迹。计算设备110的控制系统软件模块可以被配置为例如通过控制车辆的制动、加速和转向来控制车辆的运动,以便遵循轨迹。
42.计算设备110还可包括一个或多个无线网络连接150,以促进与其他计算设备的通信,例如下面详细描述的客户端计算设备和服务器计算设备。无线网络连接可以包括短距离通信协议,例如蓝牙、低功耗蓝牙(le)、蜂窝连接、以及各种配置和协议,其包括互联网、万维网、内联网、虚拟专用网、广域网、本地网络、使用一个或多个公司专有通信协议的专用网络、以太网,wifi和http、以及上述各项的各种组合。
43.计算设备110可以通过控制各种组件以自动驾驶模式控制车辆。例如,作为示例,计算设备110可以使用来自详细地图信息和规划系统168的数据完全自动地将车辆导航到目的地位置。计算设备110可以使用定位系统170来确定车辆的位置,并使用感知系统172在需要安全到达该位置时检测并响应于对象。再次,为了达到这个目的,计算设备110可以生成轨迹并使车辆遵循这些轨迹,例如,通过使车辆加速(例如,通过加速系统162将燃料或其他能量供应给引擎或动力系统174)、减速(例如,通过减少供应给引擎或动力系统174的燃料、换档和/或通过减速系统160施加制动)、改变方向(例如,通过转向系统164转动车辆100的前轮或后轮),以及信号通知这种变化(例如,通过使用转向信号)。因此,加速系统162和减速系统160可以是动力传动系统的一部分,该动力传动系统包括在车辆的引擎和车辆的车轮之间的各种组件。同样,通过控制这些系统,计算设备110也可以控制车辆的动力传动系统,以便自动地操纵车辆。
44.示例传感器
45.图3提供了示例lidar传感器300的功能图,其可以对应于外壳212、220、230、232的任何传感器。传感器300可以被并入前述感知系统和/或可以被配置为,例如经由有线或无线连接接收来自计算设备110的命令。传感器300可以包括外壳310以保护内部传感器组件320(由于它们在外壳310内部,因此在图3中以虚线示出)不受诸如水、灰尘、昆虫和其他污染物的碎屑的影响。但是,随着时间的推移,外壳和其他传感器组件可能会收集碎屑。这样,因为由内部传感器组件发送和接收的信号可能会被碎屑阻挡,内部传感器组件320的功能可能会受到阻碍。为了解决这个问题,可以通过使用清洁液从传感器300清除碎屑。
46.外壳310可以配置为各种形状和尺寸。如上所述,外壳可以被配置为外壳212、230、232中的任何一个。外壳可以由诸如塑料、玻璃、聚碳酸酯、聚苯乙烯、丙烯酸、聚酯等的材料组成。例如,外壳可以是金属或塑料外壳,以及内部传感器组件320具有允许传感器发送和/或接收信号的“窗口”、孔或传感器输入表面330。
47.内部传感器组件320可以通过传感器输入表面330发送和接收一个或多个信号。传感器输入表面330可以是透镜、反光镜或其他表面,信号可以通过该透镜、反光镜或其他表面传递或导引到其他传感器组件,以便生成传感器数据。内部传感器组件可以包括一个或多个激光源322、一个或多个接收器324(例如光电探测器)、各种光束转向组件326(例如透镜和反光镜,以将光脉冲或光流导引出传感器以及将返回光导引至一个或多个接收器324)、以及控制器340。激光源322可包括产生离散光脉冲或连续光流的激光源。控制器340可包括一个或多个处理器,例如一个或多个处理器120或其他类似配置的处理器。
48.对于飞行时间(time of flight,tof)lidar传感器,车辆的传感器300和/或另一系统(例如,感知系统)的控制器340可以使用由激光光源产生的光脉冲的方向、在接收器处接收的光以及飞行时间来确定表面的位置,并且可以使用返回光的幅度确定表面的反射率。同时,这些附加传感器数据可以被一起认为是lidar传感器数据点。在某些激光雷达中,频率可用于定义传感器数据点,例如在具有相应波长范围的调频连续波(fmcw)lidar传感器中,。这些lidar传感器中的每一个都可以向许多不同的方向发光。可以由车辆100的lidar传感器和/或其他系统生成的lidar传感器数据点点云或点组。车辆100的各种系统可以使用传感器数据,以便如上所述在自动驾驶模式下控制车辆。就此而言,控制器340可以发布传感器数据,即,使传感器数据可用于车辆100的各种其他系统。
49.外壳310和内部传感器组件320之一或两者可以是可旋转的,尽管在其他示例中,外壳和内部传感器组件都不可是旋转的。为了能够旋转,内部传感器组件320和/或外壳310可以附接到马达350。在一个示例中,内部传感器组件可以通过允许内部传感器组件320和外壳310旋转的轴承组件固定到车辆,而保持传感器的其他组件固定。作为替代,内部传感器组件和外壳可以配置为彼此独立地旋转。就此而言,外壳310的全部或部分可以是透明的,以便使信号能够穿过外壳并到达内部传感器组件320。此外,为了实现独立旋转,可以将第一马达配置为旋转外壳310,并可以将第二马达配置为旋转内部传感器组件。在该示例中,可以旋转外壳以实现清洁,而内部传感器组件仍可以起到捕获信号并生成传感器数据的作用。
50.编码器360可以用于追踪马达350、外壳310和/或内部传感器组件320的位置。就此而言,控制器可以基于来自编码器360的反馈控制马达350以便旋转外壳310和/或内部传感器组件320。如下所述,该旋转可用于尝试从传感器输入表面330清除清洁液、水和/或其他碎屑。
51.图4是清洁系统400和传感器300的示例功能图。在该示例中,一个或多个喷嘴410可以例如经由管道420连接到存储清洁液432的储液器430以及泵440,以便根据需要将清洁液从喷嘴中推出以帮助清洁传感器输入表面330。一个或多个喷嘴410可以相对于外壳310定位,以便将清洁液432喷洒在传感器输入表面330处。控制器450可以包括一个或多个处理器和存储器,其被配置为与处理器120和存储器130相同或相似。控制器450可以被配置为例如从计算设备110接收指示传感器输入表面330需要清洁的信号,并且可以通过激活清洁系统的泵和/或其他功能作出响应,以使得清洁液432通过喷嘴410(如图4的虚线434所示)喷洒在传感器输入表面上。
52.可以选择用于清洁传感器输入表面330的清洁液432对于由传感器300产生的光的波长或波长范围是不透明的,或者更确切地说,工作波长或波长范围。例如,如果传感器300利用905nm或1550nm的光脉冲,则清洁液对于该波长的光或至少包括905nm或1550nm的波长范围的光可以是不透明的。
53.可以将不同类型的液体和颜料添加到典型的清洁液中,以使清洁液对于由lidar传感器产生的光的波长或波长范围不透明。作为一个示例,该液体可以包括在可见光光谱(例如,400nm至700nm)中不透明的液体,例如黑色或者甚至是超黑色食用色素,其对于lidar传感器的工作波长或波长范围也可能是不透明的。作为另一个示例,该液体可以包括仅在lidar传感器的工作波长或波长范围内不透明的、而在可见光波长下透明的液体。此类
液体可能包括“隐形墨水”和其他无毒液体。另外,由于水在近红外光谱中仍然很大程度上是透明的,因此溶解在水中的颜料对于lidar传感器的工作波长或波长范围可能非常有效。
54.另外或可替代地,小的浓缩颜料可被嵌入在外孔的小区域中。当孔中包含水滴时,这些颜料会慢慢溶解到这些水滴中,从而使其不透明。
55.示例方法
56.在工作期间,传感器300可以通过使用激光源322起作用以在特定方向上产生特定波长或特定波长范围的光。例如,图5a
‑
5f提供了在工作时传感器300的各方面的示例表示。转到图5a,每个激光源322a、322b产生光脉冲510a、510b。如图5b所示,光束转向组件326可以引导光沿不同方向通过传感器输入表面330。光可能会从对象表面反射回去并返回到传感器。光脉冲可以接触传感器300(或更确切地说,车辆100)的环境中的一个或多个对象。例如,转到图5c,光脉冲510a可以接触对象520,并且该光脉冲的全部或一部分(现在是反射光512a)可以如图5d所示朝着传感器300反射回去。如图5e所示,反射光512a可以穿过传感器输入表面330,并且如图5f所示,被光束转向组件326引导回接收器324a。接收器324(包括接收器324a和324b)可以生成传感器数据,例如接收到的光的方向和飞行时间。如上所述,当车辆100以自动驾驶模式操作时,或者更确切地说,以自动驾驶模式来控制车辆时,该传感器数据可以被车辆100的各种系统用来做出驾驶决策。
57.在一些情况下,控制器450可以例如从计算设备110接收指示传感器输入表面330需要清洁的信号。该信息可以由诸如计算设备110或另一系统生成,或者由被配置为确定传感器窗口是否脏了的另一系统生成。例如,该系统可以捕获传感器窗口的图像并处理这些图像以确定在传感器窗口上是否存在任何异物碎屑。
58.如上所述,控制器450可以通过激活清洁系统400的泵440和/或其他功能来作出响应,以便通过管道420将清洁液432从储液器中泵出,直到其到达喷嘴410为止。喷嘴410可以将清洁液432的喷洒引导到传感器300的传感器输入表面330。
59.如上所述,水滴和其他异物碎屑可以改变返回光的特性。例如,它们可能导致返回光被导向错误的内部接收器。例如,图6a
‑
6f提供了传感器300的各方面的示例表示,并演示了水滴、典型的清洁液(即,非清洁液432)或其他异物碎屑可以导致返回光被引导到错误的内部接收器。转到图6a,每个激光源322a、322b产生光脉冲610a、610b。如图6b所示,光束转向组件326可以引导光沿不同方向通过传感器输入表面330。光可以从对象表面反射回去并返回到传感器。光脉冲可以接触传感器300(或更确切地说,车辆100)的环境中的一个或多个对象。例如,转到图6c,光脉冲610a可以接触对象620,并且该光脉冲的全部或一部分(现在是反射光612a)可以如图6d所示朝着传感器300反射回去。在该示例中,反射光612a可以在穿过传感器输入表面之前穿过传感器输入表面330上的典型清洁液的液滴630、水或其他碎屑,如图6e所示。如图6f所示,该液滴630可以允许反射光612a的一部分614a穿过光束转向组件326并返回到接收器324a。然而,液滴630还可以将反射光612a的一部分616a偏转到接收器324b。接收器324(包括接收器324a和324b)可以生成传感器数据,例如接收到的光的方向和飞行时间。
60.到达接收器624b的反射光612a的一部分616a可能导致串扰伪像,诸如以虚线示出的图6g的虚假对象640,其在场景中实际上不存在。换句话说,传感器300可以发布针对实际上不存在的对象的传感器数据。这种现象可以在包括一个或多个在许多不同方向上产生光
的激光源的lidar传感器中得到放大。这种伪像经常出现在将大量光反射回lidar传感器的对象周围,例如法向入射的后向反射镜或镜面反射镜,放大了杂散光路对lidar传感器的不正确接收器的影响。
61.在某些情况下,真实对象通常可以在点云中看到的这些串扰伪像内。另外,串扰伪像会导致其他信号丢失,因为lidar传感器可能会在接收来自较远场景中实际对象的光之前被伪像信号饱和。
62.图7提供了用于清洁lidar传感器的示例方法。当清洁传感器的传感器输入表面(例如传感器300的传感器输入表面330)时,在框710处,不使用典型的清洁液,而是将对特定波长不透明的清洁液施加到包括外壳和容纳在外壳内的内部传感器组件的lidar传感器的传感器输入表面。外壳还包括光可以穿过的传感器输入表面。内部传感器组件包括被配置为产生特定波长的光的激光源。
63.这样,在框720处,所施加的清洁液用于吸收特定波长的光。该清洁液可以包括清洁液432。就此而言,所施加的清洁液可以在可见光光谱中或者在可见光光谱中是透明的。如上所述,这种清洁液可以包括食用色素,液体可以包括仅在传感器300的工作波长或波长范围内不透明的液体,或者再可见光波长范围内透明的液体,或者是溶解在水中的在传感器300的工作波长或波长范围内不透明的颜料。另外,在某些情况下,所施加的清洁液可以与传感器输入表面上的异物碎屑混合。
64.一旦将清洁液喷洒或以其他方式施加到孔上,留在孔上的任何水滴也可能对lidar传感器产生的光的波长不透明。换句话说,所施加的清洁液可用于降低特定波长的光穿过清洁液导致lidar传感器产生串扰伪像的可能性。其降低了光的反射部分在多个接收器中的另一个被接收的可能性。
65.例如,图8a
‑
8f提供了传感器300的各个方面的示例表示,并展示了清洁液432的水如何可以降低传感器产生串扰伪像的可能性。转到图8a,每个激光源322a、322b产生光脉冲810a、810b。如图8b所示,光束转向组件326可以引导光沿不同方向通过传感器输入表面330。光线可以会从对象表面反射回去并返回到传感器。光脉冲可以接触传感器300(或更确切地说,车辆100)的环境中的一个或多个对象。例如,转到图8c,光脉冲810a可以接触对象820,并且光脉冲的全部或一部分(现在是反射光812a)可以朝着传感器300反射回去,如图8d所示。在该示例中,反射光812a可以在穿过传感器输入表面之前穿过传感器输入表面330上的清洁液432的液滴830,如图8e所示。该液滴830可以允许反射光812a的一部分814a穿过光束转向组件326并返回到接收器324a,如图8f所示。然而,液滴830还可以将反射光812a的一部分816a偏转到接收器324b。接收器324(包括接收器324a和324b)可以生成传感器数据,例如接收到的光的方向和飞行时间。
66.尽管图5a
‑
5f、6a
‑
6g和8a
‑
8f的示例与诸如飞行时间lidar传感器生成的那些光脉冲有关,但是对于诸如由fmcw lidar传感器产生的在一定波长范围内的连续光流可以预期得到类似的结果。在这种情况下,所使用的清洁液可以选择为在该波长范围内不透明。另外,外壳的旋转(如上所述)或其他运动、来自喷嘴喷出的空气或其他气体、和/或一个或多个擦拭器可以随后用于清洁清洁液432的孔。在清洁液或水蒸发后任何留在孔上的残留颜料可以在稍后去除,也许在对激光雷达孔执行维护更方便的时候。例如,这种清洁可以在对车辆的维护期间发生在车库或仓库。
67.另外,由于清洁而残留的任何水滴也可能对lidar传感器的工作波长或波长范围是不透明的。这样,碰撞清洁液(或与清洁液混合的液滴)的任何具有波长或波长范围并且否则会以错误的方向散射并被设置在错误的接收器上的光,可以被清洁液吸收。这可以降低串扰伪像的可能性,从而提高lidar传感器的串扰性能。尽管由于清洁后留在孔上的清洁液残留物可能会影响lidar传感器的测距性能,从而可能阻挡一些返回光到达接收器,但这可以与串扰伪像方面的改进相平衡。
68.除非另有说明,否则前述替代示例不是互相排斥的,而是可以以各种组合实施以实现独特的优点。由于可以在不背离权利要求所限定的主题的情况下利用以上讨论的特征的这些和其他变化以及组合,因此,对实施例的前述描述应当通过说明的方式而不是通过限制权利要求书所限定的主题的方式来进行。另外,本文描述的示例的提供以及用短语表达为“诸如”、“包括”等的用语不应被解释为将权利要求的主题限制于特定示例;相反,这些示例仅旨在说明许多可能的实施例之一。此外,不同附图中的相同附图标记可以标识相同或相似的元件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1