一种基于微纳超声机器人的电化学传感器
1.本发明属于微纳机器人应用领域,并涉及电化学传感领域,尤其是一种基于微纳超 声机器人的电化学传感器。
背景技术:
2.免疫传感技术是当前研究较热的一种检测目标细菌或离子、蛋白质的技术,是生物 免疫学、光学、电化学技术的高度结合,其利用传感器表面的抗体抗原的结合后产生的 阻抗、质量、以及表面结构的变化,通过光学或者电化学原理实现检测。电化学生物传 感器技术是免疫传感技术的一类,其利用电化学和免疫学原理实现对目标细菌或其他目 标物质的检测,相比较其他技术,其具有更高的集成度,而且检测能力也较强。常用的 电化学生物传感器可分为阻抗型,电流型和酶免疫型,对细菌的检测常使用阻抗型传感 器,对离子和蛋白质的检测常使用电流型和酶免疫型传感器。
3.检索现有的相关文献发现,现有的电化学生物传感器,多通过生物修饰电化学传感 电极表面,与溶液中的目标物质特异性结合,从而改变电极表面电学信号,以此来测定 溶液中目标物质浓度。比如,公开号为cn111912976a的中国发明专利申请所述的一种 电化学阻抗生物传感器,其金电极表面修饰cd44适配体,可在一定程度上提高cd44肿 瘤细胞的检测灵敏度,但是该方法仅能依靠被动扩散的方式捕获部分细胞,难以实现在 三维空间内对细胞的主动捕获,因此该种传感器检测灵敏度,检测下限均不高。公告号 为cn107144603b的中国发明专利所述的一种基于静电作用的阻抗型电化学生物传感器, 将sh
‑
dna修饰在金电极上,然后将含有赖氨酸的多肽修饰在金电极上,利用组蛋白乙酰 化酶和组蛋白去乙酰化酶使含有赖氨酸的多肽在电中性和正电性之间转化,从而,脱离 和吸附在电极表面,引起阻抗变化,实现对组蛋白乙酰化酶和组蛋白去乙酰化酶的检测, 该种方法较被动扩散的方式提高了检测灵敏度,但是同样是基于特殊的电极表面修饰工 艺来提高检测灵敏度,影响范围有限。公告号为cn111551595b的中国发明专利所述的 一种用于测定三氯生含量的复合材料修饰乙炔黑碳糊电极,利用该复合材料修饰的乙炔 黑碳糊电极作为工作电极,铂丝电极作对电极,饱和甘汞电极做参比电极,采用线性伏安 法,根据测定的氧化电流信号值与待测物浓度之间的关系,构建三氯生的电化学传感器, 以实现对三氯生的快速分析测定,该种方法同样难以脱离复杂的电极修饰过程和传统的 被动扩散方式,检测灵敏度和检测下限有限。
4.在微纳机器人方面,经过长期的努力,研究人员已经制备出刚性、柔性、球形、管 状、螺旋形等多种形式的微纳机器人,并发明了光场,磁场,超声场,化学气泡等多种 驱动控制方式,但是,光驱动、磁场驱动等方式普遍存在驱动速度慢或者外部辅助设备 体积大等缺陷。
5.因此,利用微纳超声机器人的捕获和富集作用,改进现有的电化学生物传感器,提 高电化学生物传感器的灵敏度和检测限,具有显著的现实意义和实用价值。公开号为 cn111082705a的中国发明专利申请所述的一种生物兼容型铁
‑
二氧化锰体系微纳米机 器
人,可利用超声气泡进行驱动,可作为目标物质的载体;公开号为cn111774105a的 中国发明专利申请所述的一种基于微纳超声机器人阵列的超声精密微流控设备,对微纳 超声机器人控制及传感器载体设计具有显著的借鉴意义。
技术实现要素:
6.针对现有技术的不足,本发明旨在提供一种基于微纳超声机器人的电化学传感器, 解决现有技术中所用电化学传感器灵敏度低,检测限不足等问题。本发明在现有电化学 传感器中引入了微纳超声机器人,利用微纳超声机器人对目标物质的主动捕获和富集作 用,显著提升电化学传感器的灵敏度和检测下限。
7.本发明还提供了具有该电化学传感器的检测平台。
8.为达到上述目的,本发明采用的技术方案如下:
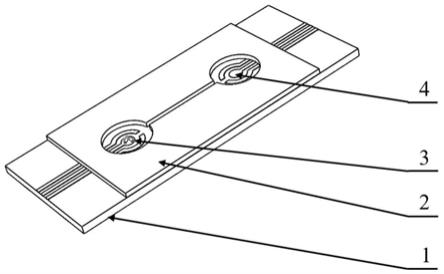
9.一种基于微纳超声机器人的电化学传感器,包含:基板、覆盖于基板上表面的盖板、 位于基板下表面的压电换能器、连接压电换能器两端的压电换能器电极、微纳超声机器 人、电化学传感电极;所述盖板上设有镂空的微流道,该微流道的两端内分别收容两个 电化学传感电极的前端;微纳超声机器人位于微流道内;
10.压电换能器用以产生高频微幅振动,进而驱动传感器整体做超声频率振动,在微流 道内产生特定的声流场;微纳超声机器人中所含催化剂成分促使底物分解产生气泡,利 用气泡在声流场中的振动,控制微纳超声机器人在液体介质中做三维空间内的运动以捕 获液体介质中分散的目标物质,然后控制捕获有目标物质的微纳超声机器人富集在电化 学传感电极表面,引起电化学传感电极上电学信号的变化,以此来测定液体介质中目标 物质的浓度。
11.进一步的,基板上方以丝网印刷的方式印刷电化学传感电极并粘贴盖板,盖板上以 微浇筑工艺加工微流道;微流道中注入生物体液;微纳超声机器人分散于微流道内,利 用超声振动实现对微颗粒的捕获、运输和富集。
12.进一步的,所述基板的材质为石英玻璃或硅片;盖板材质为有机玻璃或者有机硅橡 胶。
13.进一步的,所述电化学传感电极采用三电极体系,包括对电极(ce)、工作电极(we)、 参比电极(re)。
14.进一步的,所述微流道包括两个储层,两个储层分别用于收容两端电化学传感电极 的前端参比电极(re)、印刷对电极(ce)和工作电极(we),另具有连通两个储层的 中间通道。
15.进一步的,所述微纳超声机器人为多层中空管状结构,最外层进行功能化修饰以实 现对目标物质的捕获。
16.进一步的,所述电化学传感电极通过增加工作电极数量并共用参比电极和对电极的 方式实现多种目标物质浓度的测量。
17.进一步的,所述电化学传感电极印刷为叉指型,以增加微纳超声机器人的富集区域。
18.进一步的,所述电化学传感电极表面固定不同种类敏感物质,用以测定不同种类目 标物质浓度。
19.本发明所述的一种基于微纳超声机器人的电化学传感器,其实现方法为,结合微纳 超声机器人对目标物质的捕获、富集作用和电化学传感器的测量方法,弥补传统电化学 传感器灵敏度低、检测下限不足的缺陷,实现快速、高效、准确地测量溶液中,目标物 质浓度,包括步骤如下:
20.首先,将信号发生器或计算机产生的激励信号用功率放大器放大,而后利用压电材 料的逆压电效应驱动压电换能器振动,进而带动传感器整体振动,在微流道中产生特定 声流场。同时微流道中的微纳超声机器人在特定频率下,在微流道储层中做三维空间内 的大行程运动,捕获溶液中的目标物质。待捕获完全后,改变超声频率,控制微纳超声 机器人富集在电化学传感电极表面,从而造成电化学传感电极上电学信号的变化。通过 外部集成的电化学分析仪器,就可以通过该电学信号的变化测定溶液中目标物质的浓度。
21.本发明具有如下有益效果:
22.1.首先,将微纳超声机器人对目标物质的特异性捕获和富集作用应用于电化学传感 器,实现了将三维空间内的目标物质富集到电化学传感电极,从而极大地提高了电化学 传感器的灵敏度和检测下限。
23.2.其次,利用微纳超声机器人运动速度快、外部辅助设备简单的特点,使得该传感 器可以实现快速测量且便于小型化。
24.3.通过对微纳超声机器人进行功能化修饰,可以跟不同的目标物质结合,测量不同 种类目标物质的浓度;可以灵活设计电化学传感电极的形状,通过增加工作电极数量并 共用参比电极和对电极,可以测量多种目标物质的浓度;将微流道设计成多储层的样式, 可以实现多次测量,示例中的传感器可以测量两次。因此,该传感器使用范围广,设计 灵活多样。
25.4.可将工作电极和参比电极设计为叉指型,从而增加微纳超声机器人富集区域,进 行超高灵敏度检测。
附图说明
26.图1(a)为一种集成微纳超声机器人的电化学传感器三维结构图(正面);
27.图1(b)为一种集成微纳超声机器人的电化学传感器三维结构图(背面);
28.图1(c)为一种集成微纳超声机器人的电化学传感器结构爆炸图;
29.图2(a)为包含微纳机器人的电化学传感器电极示意图;
30.图2(b)为可检测两种物质(左)和三种物质(右)的电化学传感器电极示意图
31.图3为特异性蛋白修饰微纳超声机器人对细菌的捕获及运输示意图;
32.图4(a)为三维储层内微纳超声机器人捕获溶液中的细菌示意图;
33.图4(b)为捕捉有细菌的微纳超声机器人向工作电极和参比电极附近富集示意图;图5为电解质溶液和细菌作为阻抗时电极间等效电路模型;
34.图6为用于超高灵敏度检测的叉指电极示意图;
35.图中,1为基板;2为有机硅橡胶盖板;3为微纳超声机器人;4为电化学传感电极; 5为压电换能器;6为压电换能器电极;7为对电极(ce);8为工作电极(we);9为 参比电极(re);10为目标细菌;11为特异性蛋白;12为气泡;21为微流道结构;22 为储层;23为中间通道;41为电极接入端。
其粘合性,再将盖板2与石英基板1上表面贴合,完成密封。盖板2装配时应保证储层 22包含印刷的电化学传感电极4的前端并尽量使电化学传感电极4的前端位于储层中央。
44.粘贴压电陶瓷片5时,从a管和b管中取适量的导电银胶,1:1充分混合后,取适 量混合后的导电银胶,均匀地涂在压电陶瓷片5的一侧,而后将其粘贴到石英基板1对 应的位置,用台钳施加适当压力压紧,再在烤箱中60℃加热1.5小时。使用导电银胶从 压电陶瓷片5的正反两面各引出一根导线,分别作为信号输入端和接地端连接压电换能 器电极6。
45.生物兼容型铁
‑
二氧化锰体系微纳超声机器人3的制备可分为以下步骤:(1)进行 聚乙烯二氧噻吩支撑外层的电化学沉积,沉积时间为100
‑
130s;(2)在步骤一制备的聚 乙烯二氧噻吩支撑外层的基础上,进行fe中间层的电化学沉积,沉积时间为40
‑
70s;(3) 施加超声场,在步骤二得到的聚乙烯二氧噻吩支撑外层和fe中间层的基础上进行mno2内层的电化学沉积,沉积时间为30
‑
70s;(4)将步骤三得到的含有聚乙烯二氧噻吩外层、 fe中间层和mno2内层的聚碳酸酯薄膜进行抛光溶解以及离心处理,得到管状微纳超声 机器人。管状微纳超声机器人3制备完成后,还需要对其外表面进行功能化修饰,具体 修饰内容视目标细菌而定。
46.图3所示为功能化修饰微纳超声机器人对目标细菌的捕获及运输示意图,一方面, 在溶液中,微纳超声机器人3的催化层催化溶液在微纳超声机器人3尾部产生气泡12; 另一方面,在超声激励下,气泡振动带动微纳超声机器人3在溶液中运动,由特异性蛋 白捕获分散在溶液中的目标细菌10并将其运输到指定位置。
47.图4(a)所示为三维储层内微纳超声机器人3捕获溶液中的目标细菌10示意图,图 4(b)所示为捕捉有目标细菌10的微纳超声机器人3向工作电极(we)8附近富集示意 图。首先,调节压电换能器5激励频率至特定值(一般为高频模式),控制微纳超声机 器人3在三维储层内做大行程运动,充分捕获分散在储层22内的目标细菌10。然后, 调节压电换能器5激励频率至另一特定值(一般为低频模式),分散的微纳超声机器人3 将运输目标10细菌向工作电极(we)8和参比电极(re)9附近富集,造成两个电化 学传感电极4之间阻抗的变化。这种方式弥补了传统阻抗型电化学生物传感器只能依靠 被动扩散方式在有限范围内捕获目标细菌的不足,能够显著提高传感器的灵敏度和检测 下限。
48.图5所示为电解质溶液和细菌作为阻抗时电极间等效电路模型,其中c
par
表示相 界面产生的寄生电容,r
sol
和c
sol
分别表示电解质溶液的电阻和电容,r
bcm
和c
bcm
分别表示细菌细胞膜的电阻和电容,r
cyt
表示细菌细胞质的电阻。当大量细菌分布在工 作电极和对电极之间时,由于细胞膜电容,细胞膜电阻以及细胞质电阻的存在,会导致 电极间阻抗发生明显变化。
49.图6所示为用于超高灵敏度检测的叉指电极示意图。在进行目标细菌浓度检测时, 可以将工作电极(we)与对电极(ce)设计为如图6所示的叉指形,这样可以极大程 度的增加微纳超声机器人的富集区域,进行超高灵敏度检测。
50.本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于 本技术领域的普通技术人员来说,在不脱离本发明所提及的利用微纳超声机器人的主动 富集原理进行目标物质检测的前提下,还可以对微纳超声机器人类型及表面功能化方法、 电化学传感电极表面功能化方法以及电化学检测方法进行改进,这些改进也应视为本发 明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1