一种智能驾驶的交互系统及车辆的制作方法
1.本发明涉及智能驾驶技术领域,特别涉及一种智能驾驶的交互系统及车辆。
背景技术:
2.随着经济和科技的蓬勃发展,汽车工业越发趋于智能网联化,越来越多的具备智能网联功能的车辆进入了消费市场,因此人们对车辆的智能网联化的关注也越来越活跃。
3.为了更好的向用车客户呈现驾驶辅助信息和操控状态,因此出现了智能驾驶的交互系统(hmi),而一个优秀的hmi系统可以将车辆状态、行车场景环境信息、报警等信息实时的投入到人机交互接口,更好的为用户提升智能驾驶下车内的直观视觉和交互体验,带来更强劲的科技感,共同营造沉浸式的用车体验,并稳步提升驾驶的实际操作性。
4.现有技术当中,通常车辆的hmi系统仅能显示高级智能驾驶辅助系统adas功能的工作状态和报警信息,因此,不能给客户带来科技前沿的人机交互体验。
技术实现要素:
5.基于此,本发明的目的是提供一种智能驾驶的交互系统及车辆,用于解决现有技术中,通常车辆的hmi系统仅能显示高级智能驾驶辅助系统adas功能的工作状态和报警信息,不能给客户带来科技前沿的人机交互体验的问题。
6.本发明提出一种智能驾驶的交互系统,应用于车辆上,所述智能驾驶的交互系统包括采集装置、控制装置以及显示装置;
7.所述智能驾驶的交互系统包括采集装置、控制装置以及显示装置;
8.所述采集装置用于实时采集所述车辆的外部场景信息,所述外部场景信息至少包括车道图像信息、目标图像信息以及目标距离信息;
9.所述控制装置根据所述外部场景信息确定车道类型及目标类型,并且将所述车道类型及所述目标类型所对应的数据信号传递至所述显示装置;
10.所述显示装置用于在接收到所述数据信号后,将数据信号按照预设算法进行实时动画显示。
11.本发明还提出一种车辆,包括上述的智能驾驶的交互系统。
12.上述的智能驾驶的交互系统及车辆,通过设置采集装置、控制装置以及显示装置,使得车辆状态、行车场景环境信息、报警等信息实时的通过显示装置动画显示,更好的为用户提升智能驾驶下车内的直观视觉和交互体验,带来更强劲的科技感,共同营造沉浸式的用车体验,并稳步提升驾驶的实际操作性。具体的,采集装置能够实时采集车辆的外部场景信息,使得外部场景信息能够实时的通过显示装置动画显示;另一方面,控制装置能够根据外部场景信息确定车道类型及目标类型、并且能够进行进一步转换成相应的数据信号,进一步的,显示装置能够将数据信号按照预设算法进行实时动画显示。解决了现有技术中,通常车辆的hmi系统仅能显示高级智能驾驶辅助系统adas功能的工作状态和报警信息,不能给客户带来科技前沿的人机交互体验的问题。
13.进一步的,所述采集装置包括设于所述车辆上的摄像模块、传感器模块及分别连接所述传感器模块和所述摄像模块的控制模块,所述摄像模块用于实时采集所述车道图像信息及所述目标图像信息。
14.进一步的,所述传感器模块在扫描周期内持续发射频率变化的信号,通过接收所述目标物体反射回来的信号和发射信号的频率差,来反馈所述目标距离信息。
15.进一步的,所述控制模块接收所述目标距离信息及所述目标图像信息并确认所述目标物体的类型,并将所述目标类型传递至所述控制装置。
16.进一步的,所述控制装置包括判断模块,所述判断模块对所述车道图像信息进行灰度化及二值化处理,同时进行车道线边缘检测、车道线拟合以及车辆偏移距离计算操作,确定所述车道类型。
17.进一步的,所述控制装置还包括连接所述判断模块的处理模块,当所述处理模块接收到所述车道类型及所述目标类型时,对所述车道类型进行xy轴坐标区域划分形成车道像素模型,并将所述车道像素模型及所述目标类型转换成相应的数据信号传递至所述显示装置。
18.进一步的,所述显示装置包括数据处理单元及显示单元,所述数据处理单元将所述数据信号按照预设算法进行数据处理,同时由所述显示单元对数据处理后的数据信号进行实时动画显示。
19.进一步的,所述智能驾驶的交互系统还包括监测装置,所述监测装置在所述车辆运行过程中实时监测所述车辆的运行状态,当所述目标距离信息处于预设的距离阈值范围时,所述监测装置会发送警报标志位至所述显示单元进行显示,同时进行语音播报。
附图说明
20.图1为本发明实施例中车辆的结构示意图;
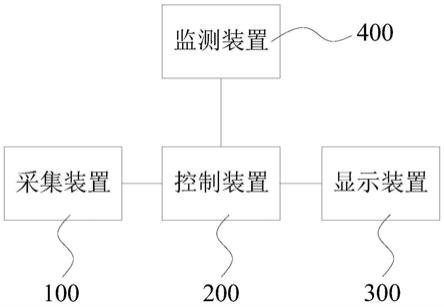
21.图2为本发明第一实施例中智能驾驶的交互系统的结构示意图;
22.图3为本发明第一实施例中智能驾驶的交互系统的显示效果图;
23.图4为本发明第一实施例中采集装置的结构示意图;
24.图5为本发明第一实施例中控制装置的结构示意图;
25.图6为本发明第一实施例中智能驾驶的交互系统的坐标范围示意图;
26.图7为本发明第一实施例中智能驾驶的交互系统的坐标区域划分示意图;
27.图8为本发明第一实施例中显示装置的结构示意图;
28.图9为本发明第一实施例中显示装置的算法策略流程图;
29.主要元件符号说明:
[0030][0031][0032]
如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
[0033]
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
[0034]
需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
[0035]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0036]
以下实施例均可以应用到图1所述的车辆当中,图1出车辆包括前视单目摄像头ipm 1、hmi处理器2、后向毫米波雷达bsd 3、前向毫米波雷达mrr 4以及,图中列举未穷尽。
[0037]
其中,前视单目摄像头ipm 1、后向毫米波雷达bsd 3、前向毫米波雷达mrr 4均与hmi处理器2通过电性连接,相互之间能够发生通讯作用。具体的,由前视单目摄像头ipm 1负责采集车道图像信息以及目标图像信息,由后向毫米波雷达bsd 3、前向毫米波雷达mrr 4负责采集车辆外部的目标距离信息,将该类信息通过信号传输至hmi处理器2内,由hmi处理器2进行计算机判断,包括:hmi处理器2根据上述的车道图像信息、目标图像信息以及目标距离信息确定车道类型及目标类型,并且将所述车道类型及所述目标类型进行处理后,转换成相应的数据信号,同时将数据信号传递至液晶仪表按照预设算法进行实时动画显示。
[0038]
需要指出的是,图1示出的结构并不构成对车辆的限定,在其它实施例当中,该车辆还可以包括比图示更少或者更多的部件,或者组合某些部件,或者不同的部件布置。
[0039]
实施例一
[0040]
请参阅图2至图3,所示为本发明第一实施例中的智能驾驶的交互系统,应用于车辆上,所述智能驾驶的交互系统包括采集装置100、控制装置200以及显示装置300;
[0041]
采集装置100用于实时采集车辆的外部场景信息,外部场景信息至少包括车道图像信息、目标图像信息以及目标距离信息;
[0042]
可以理解的,采集装置100能够实施获取车辆的外部信息,确保对外部信息的实时显示,进一步的使用户更加精准的了解到车辆的功能状态及车况外部信息。
[0043]
控制装置200根据外部场景信息确定车道类型及目标类型,并且将车道类型及目标类型所对应的数据信号传递至显示装置300;
[0044]
可以理解的,控制装置200能够对外部场景信息进行有效的处理,进而达到确定车辆所在的车道线类型以及车辆外部目标物体的类型,使得交互系统能够更加精准的显示出车辆的外部场景。
[0045]
显示装置300用于在接收到所述数据信号后,将数据信号按照预设算法进行实时动画显示。
[0046]
可以理解的,显示装置300通过对上述数据信号进行算法处理,使得交互系统中对于车辆信息、状况、外部信息能够得到更加完善的动画处理,提升了用户的体验感以及科技前沿的人机交互体验。
[0047]
智能驾驶的交互系统还包括监测装置400,监测装置400在车辆运行过程中实时监测所述车辆的运行状态,当目标距离信息处于预设的距离阈值范围时,监测装置400会发送警报标志位至显示单元320进行显示,同时进行语音播报。
[0048]
可以理解的,在本技术中,监测装置400能够实现交互系统中对adas功能工作状态进行实时监测,具体的,adas功能工作状态包括:
[0049]
acc工作状态:0x0:off关闭模式、0x1:standby待机模式、0x2:active激活模式、0x3:override驾驶员超越模式、0x4:standstill跟停模式、0x5:failure失效模式。设置跟车时距taugapset=0x1
‑
0x4,分别为间距1
‑
间距4;其中acc_state==0x2时,acc图标及设置时距图标为绿色,;acc_state≠0x2时,acc图标及设置时距图标为白色;
[0050]
tja/ica工作指示灯:0x0:inactive待机模式(白色)、0x1:active激活模式(绿色)。fcw/aeb信号均在等于0x1 warning的时候,进行弹窗报警,其余状态无报警提醒。
[0051]
请参阅图4,所示为本发明第一实施例中采集装置100,包括设于车辆上的摄像模块110、传感器模块120及分别连接传感器模块120和摄像模块110的控制模块130,摄像模块110用于实时采集所述车道图像信息及所述目标图像信息。
[0052]
可以理解的,摄像模块110通过视觉采集车道图像信息及目标图像信息,需要指出的是,在本技术中,优选的,摄像模块110采用前视单目摄像头ipm,该前视单目摄像头ipm能够使得画面实时采集更加精准。
[0053]
具体的,传感器模块120在扫描周期内持续发射频率变化的信号,通过接收目标物体反射回来的信号和发射信号的频率差,来反馈目标距离信息。
[0054]
需要指出的是,在本技术中,优选的,传感器模块120采用前向中距离毫米波雷达mrr、两枚后向中距离毫米波雷达bsd以及fmcw毫米波雷达,在扫描周期内发射频率变化的信号,通过接收被物体反射回来的信号和发射信号存在一定的频率差,来计算物体的距离;
[0055]
c为真空中的光速,目标和雷达之间距离为r,收发频率差为f
if
,s为发射信号的斜率,由于光速c远大于目标车速,我们可以忽略掉多普勒效应所带来的相位差。因此我们可以得到距离r为:
[0056][0057]
进一步的,控制模块130接收目标距离信息及目标图像信息并确认目标物体的类型,并将目标类型传递至所述控制装置200。
[0058]
可以理解的,控制模块130可以目标距离信息及目标图像信息确定的各个目标物类型、横/纵向距离发出,这里以第一个前目标物为例,前目标物类型mrr_f_obj_0x_class:0x0:unknown、0x1:car小型车、0x2 truck卡车、0x3:two_wheeler两轮车;前车与本车的纵向距离mrr_f_object_dx=0x0
‑
0xfff;前车与本车的横向距离mrr_f_object_dy=0x0
‑
0xfff;
[0059]
请参阅图5至图7,所示为本发明第一实施例中控制装置200,包括判断模块210,判断模块210对车道图像信息进行灰度化及二值化处理,同时进行车道线边缘检测、车道线拟合以及车辆偏移距离计算操作,确定车道类型。
[0060]
可以理解的,判断模块210对车道图像信息通过灰度化和二值化方式进行预处理,再进行车道线边缘检测、车道线拟合和车辆偏移距离计算,可以准确拟合出车道线的类型、曲率及本车距两边车道线的距离。
[0061]
需要指出的是,本技术中判断模块210将车道线类型(实线、虚线)和车道线曲率拟合构造呈现给驾驶员,其中可支持识别的左右车道线曲率ipm_leftline_hor_curve、ipm_rightline_hor_curve绝对值范围为1/10000~1/200,曲率为弯道半径的倒数,且曲率大于1/3000可以近似为直线;现将构造车道线分为7种弯曲程度,右弯3、右弯2、右弯1、直道、左弯1、左弯2、左弯3,为了拟合真实场景及各弯道切换连贯,通过实车多场景反复标定、对比,确定如图6所示的曲率范围及逻辑进行车道线构造;
[0062]
进一步的,控制装置200还包括连接判断模块210的处理模块220,当处理模块220接收到车道类型及目标类型时,对车道类型进行xy轴坐标区域划分形成车道像素模型,并将车道像素模型及目标类型转换成相应的数据信号传递至显示装置300。
[0063]
需要指出的是,本技术将全液晶仪表的adas显示区域进行三车道划分,然后对左中右三车道进行xy轴坐标区域划分,纵向x轴方向总分为7个坐标区域x0
‑
x1
‑
x2
‑
x3
‑
x4
‑
x5
‑
x6,横向y轴方向从左到右依次划分为13个坐标区域l6
‑
l5
‑
l4
‑
l3
‑
l2
‑
l1
‑
y0
‑
r1
‑
r2
‑
r3
‑
r4
‑
r5
‑
r6,详细坐标轴区域如图7所示;为了1:1真实重构实车下的目标障碍物场景,并保证车模在各个像素坐标区域之间的切换能够平滑连续、不会出现重叠突变,需对xy各区域的坐标范围进行精确合理的划分;通过实车多场景反复标定、对比,并结合驾驶员主驾位置的视觉感受,现对本技术的7*13坐标区域进行精确范围划分设计,如图6所示的场景重构坐标范围。
[0064]
请参阅图8,所示为本发明第一实施例中显示装置300,包括数据处理单元310及显示单元320,数据处理单元310将数据信号按照预设算法进行数据处理,同时由显示单元320对数据处理后的数据信号进行实时动画显示。
[0065]
可以理解的,显示装置300能够将数据信号按照预设算法进行实时动画显示,更好
的为用户提升智能驾驶下车内的直观视觉和交互体验,带来更强劲的科技感,共同营造沉浸式的用车体验,并稳步提升驾驶的实际操作性。
[0066]
需要指出的是,本技术根据预设算法设计了本车切换车道动画构造策略逻辑,以保证实现仪表换道显示和实际车辆换道场景精准匹配。实现的算法策略关键点如下,流程图如图9所示:
[0067]
a,维护一个fifo(先进先出)的数组或者链表,存储本车与车道线距离的dy数据(连续5个元素即dy(t0)、dy(t1)、dy(t2)、dy(t3)、dy(t4)),数据的更新与发送报文周期一致,此时仪表应根据dy去刷新实时显示本车在车道线的位置。
[0068]
b,当|dy|<0.6时,程序算法开始进行换道判断并且显示出换道界面:|dy(t4)
‑
dy(t0)|>1.5(即数组或链表最后一元素与第一个元素差的绝对值大于1.5),表示车辆后轴中心点距离车道线的距离跃迁趋势大于1.5m,车辆已经进行换道,此时仪表应该进行换道动画构造显示。
[0069]
c,如果车道线不清晰或丢失,即dy=0时,清除fifo数组或者链表的所有元素,待车道线识别正常后,再重新维护元素。
[0070]
本发明还提出一种车辆,包括上述的智能驾驶的交互系统。
[0071]
综上,本发明上述实施例当中的智能驾驶的交互系统及车辆,通过设置采集装置、控制装置以及显示装置,使得车辆状态、行车场景环境信息、报警等信息实时的通过显示装置动画显示,更好的为用户提升智能驾驶下车内的直观视觉和交互体验,带来更强劲的科技感,共同营造沉浸式的用车体验,并稳步提升驾驶的实际操作性。具体的,采集装置能够实时采集车辆的外部场景信息,使得外部场景信息能够实时的通过显示装置动画显示;另一方面,控制装置能够根据外部场景信息确定车道类型及目标类型、并且能够进行进一步转换成相应的数据信号,进一步的,显示装置能够将数据信号按照预设算法进行实时动画显示。解决了现有技术中,通常车辆的hmi系统仅能显示高级智能驾驶辅助系统adas功能的工作状态和报警信息,不能给客户带来科技前沿的人机交互体验的问题。
[0072]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0073]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1