一种柔性温度传感器阵列及其制备方法
1.本发明属于传感器材料领域,具体涉及一种柔性温度传感器阵列及其制备方法。
背景技术:
2.近些年来,用于人机交互过程中的柔性传感器或柔性传感阵列的需求与日俱增。在人机交互方面,可穿戴设备是一种可穿戴的便携式计算设备,内嵌有多种高精度传感器作为输入终端,是一种人机直接无缝、充分连接的交互方式,其中触觉交互是目前可穿戴设备产业中比较新的人机交互技术,对人机之间的信息交流和沟通方式将产生深远的影响。触觉是人类与外界交流并感受外界的重要通道之一。物体的软硬、冷暖、大小以及形状等信息,都可以在触摸中感知。触觉交互研究如何利用触觉信息增强人与计算机和机器人的交流,得益于传感器、算法、芯片的技术进步,人机交互技术的应用潜力已经开始展现,包括在手术模拟训练、娱乐、机器人遥控操作、远程医疗、机器人皮肤等领域。可穿戴设备的无限潜能也让其成为科学研究的方向所在,也将会是未来人类在虚拟现实中“真实”的感知外界的一种关键交互技术。热点技术的应用开发是机遇也是挑战,其中基于温度传感器的传感阵列存在识别率低,实时性差,需要针对柔性传感器进行性能优化、数据处理、算法优化等方法以提高传感效果。另外,更合理的阵列化温度传感器对机器人识别物体,实现机器人自主感知外界实现类似人体皮肤功能的作用具有深远的现实意义。
3.目前,用于柔性温度传感阵列的制备方法主要有以下几种:
4.1.将0.5ml二甲基亚砜用作导电性增强剂,然后将其加入10ml pedot:pss水溶液。石墨烯纳米片添加到上述的混合溶液中。在室温下磁力搅拌3h分散混合溶液,然后将其置于50w的超声浴中15分钟。将分散后的溶液滴铸到经10%hcl(盐酸)溶液浸泡1小时的聚酰亚胺基底上。放置在加热板上以150℃进行1小时的退火,得到3
‑
4微米厚的非透明石墨烯/pedot:pss薄膜。接下来,将pva(聚乙烯醇)水溶液滴铸到干燥的pedot:pss/石墨烯复合材料表面上。将复合材料在环境条件下干燥48小时以上。最后,从聚酰亚胺基底上剥离pedot:pss/石墨烯/pva复合材料。通过掩模打印电极可以形成柔性,半透明传感器阵列。此方法制备的柔性温度传感器具有很强的透明性和热电性能。
5.2.将gpani(聚苯胺/石墨烯)、pvb(聚乙烯醇缩丁醛)、无水乙醇以质量比为0.1:5:100的比例混合搅拌4h后超声处理30min。柔性基底是以10个宽为4毫米的条状ito电极以间隔1毫米在pet薄膜上平行排列而成。然后用麦勒棒涂布器将处理好的混合物均匀地涂在ito
‑
pet基底上,随后在80℃下退火15分钟以消除酒精,形成干燥的薄膜。在没有任何间隔的情况下,将同样的ito
‑
pet基底附在薄膜上,并使上下两层ito
‑
pet基底上的电极呈垂直分步。在pet的周围用紫外线环氧胶带将顶部和底部基板固定,完成制备gpani
‑
pvb复合薄膜温度传感器。该柔性传感器具有高透明度和阵列制备简单的优势。
6.3.将硫酸(360ml)/磷酸(40ml)与3g石墨混合。然后在持续保持45℃的恒定温度下连续搅拌16h的同时将18g高锰酸钾滴加进上述混合物中。然后将混合物冷却至室温,将分散体倒在400g冰上进行淬灭反应。将过氧化氢缓慢地逐滴加入到冷却的溶液中,直到分散
体变成发白的黄色。通过离心将浆液与酸分离,然后重悬于去离子水中。所得的go(氧化石墨烯)用盐酸洗涤两次后用乙醇洗涤三次,将上述浆液以20000rpm离心10分钟,然后进行两次乙酸置换溶液,将go浆液转移到乙酸中,最终形成浓度为1mg ml
‑1的溶液。将该混合物煮沸,并加入约0.04g的phb(聚羟基丁酸)粒剂作为稳定剂;在118℃下剧烈搅拌加热2h,将抗坏血酸添加到悬浮液中(抗坏血酸:go重量比为2:1)。在118℃下搅拌形成rgo(还原氧化石墨烯)/phb复合溶液。为了制造温度传感器,将复合溶液充分摇匀,然后在140℃的热板上滴一滴到柔性pet基底上已经印刷完成的银电极上,继续加热基板1min左右直到所有溶剂蒸发为止,实现制备温度敏感阵列。该传感阵列具有映射对象的温度轮廓的能力。
7.4.将0.5g直径为50nm的原始粒子态的nio(氧化镍)粉末与1g乙二醇和9g去离子水混合以形成水性混合物。然后将nio混合物用均质器超声处理10分钟。通过用二乙醇胺还原agno3合成银纳米颗粒。将合成的银纳米颗粒进行离心、洗涤并重新悬浮在30vol%的乙二醇水溶液中以形成10wt%的银油墨。再次将银和nio混合墨水在3000rpm下离心10分钟。使用压电打印机在玻璃板或聚酰亚胺薄膜上打印图案,其中在喷射速度为2.5m/s的条件下,将银和nio混合墨水喷射成直径为55μm的液滴。以25mm/s的印刷速度,以50μm的点间距印刷图案,形成直线或方形薄膜。将沉积有nio薄膜的银导线在炉中于200℃的温度下加热1小时。
8.虽然上述传感阵列基本可以感测到物体的温度,但仍存在一些不足。
9.1.基于pedot:pss/石墨烯的柔性温度传感阵列,测量波动大,应用范围小。
10.2.基于gpani/pvb的柔性温度传感阵列,感测范围小,体积较大。
11.3.基于phb/rgo的柔性温度传感阵列,制备过程较复杂,灵敏度低。
12.4.基于nio/ni墨水的柔性温度传感阵列,寿命短,对设备要求较高。
技术实现要素:
13.本发明主要针对目前柔性温度传感阵列灵敏度不高,精度不高,制备过程复杂和响应时间长而并不适用于康复机器人的技术难题,发明了一种基于pedot:pss/cnts/rgo复合材料的柔性温度传感阵列,不仅在传感精度和感测范围有较大提升,同时也降低了传感器的响应时间。具体通过以下技术方案实现:
14.本发明提供了一种柔性温度传感器阵列,其包括热敏层、柔性基底以及导线,所述热敏层设置于所述柔性基底上;
15.所述热敏层由若干温度传感单元以固定间距排布形成;
16.所述导线按设定的线路粘附在所述柔性基底上并与所述温度传感单元连接;
17.所述温度传感单元由(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))/碳纳米管/还原氧化石墨烯复合薄膜制备得到。
18.进一步地,所述若干温度传感单元采用多路复用线路连接。
19.进一步地,所述若干温度传感单元排布成方形阵列、菱形阵列、扇形阵列、圆形阵列或环型阵列。
20.本发明还提供了上述柔性温度传感器阵列的制备方法,包括以下步骤:
21.将改性后的单壁碳纳米管、还原氧化石墨烯加入到(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))水溶液中,分散均匀后,真空抽滤并干燥,得到所述(聚(3,4
‑
乙烯二氧噻
吩):聚(苯乙烯磺酸))/碳纳米管/还原氧化石墨烯复合薄膜;
22.将所述(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))/碳纳米管/还原氧化石墨烯复合薄膜按设定的图形结构进行切割,得到若干温度传感单元;
23.将所述若干温度传感单元以固定间距粘附在所述柔性基底上;
24.将导线按设定的路线粘附在所述柔性基底上并与所述温度传感单元通过银浆进行连接,形成多路复用线路;
25.待所述银浆固化后,进行封装、干燥,得到所述柔性温度传感器阵列。
26.进一步地,具体包括以下步骤:
27.s1、酸洗碳纳米管:取碳纳米管粉末加入到h2so4/h2o2混合液中,加热并冷凝回流,待冷却至室温后,用去离子水洗涤至溶液成中性,将所述溶液进行真空抽滤后干燥,制得酸洗后的碳纳米管;
28.s2、制备还原氧化石墨烯:将氧化石墨烯粉末加入水中,得到分散的氧化石墨烯溶液,滴加还原剂到所述氧化石墨烯溶液中,经反应得到还原氧化石墨烯溶液;随后将所述还原氧化石墨烯溶液洗涤至中性,抽滤并干燥,得到还原氧化石墨烯粉末;
29.s3、制备复合溶液:向pedot:pss水溶液中加入二甲基亚砜溶液,然后加入s1中所述酸洗后的碳纳米管、s2中所述还原氧化石墨烯粉末以及十二烷基苯磺酸钠粉末,搅拌并分散,得到复合溶液;
30.s4、制备复合薄膜:将s3所述复合溶液进行离心后抽滤,然后加热、干燥,得到(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))/碳纳米管/还原氧化石墨烯复合薄膜;
31.s5、切割成型:将所述(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))/碳纳米管/还原氧化石墨烯复合薄膜按设定的图形结构进行切割,得到若干温度传感单元;
32.s6、组装柔性温度传感器阵列:将s5所述切割成型后的温度传感单元转移到涂有粘结层的所述柔性基底上,以固定间距排列;将导线按设定的路线形式黏附在柔性基底上并与所述热敏层通过银浆进行连接,形成多路复用线路;待所述银浆固化后,进行封装、干燥,得到所述柔性温度传感器阵列。
33.进一步地,所述步骤s1中,所述碳纳米管与所述h2so4/h2o2混合溶液的比例为(0.01
‑
0.03)g:(10
‑
30)ml,所述h2so4/h2o2混合溶液为体积比为(4
‑
5):1的100ml 2mol/l硫酸水溶液和30%过氧化氢水溶液的混合溶液。
34.进一步地,所述步骤s3中,采用质量分数为1.3wt%的(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))水溶液,聚(3,4
‑
乙烯二氧噻吩)与聚(苯乙烯磺酸)质量比为5:8。
35.进一步地,所述步骤s3中,加入的s1中所述酸洗后的碳纳米管与s2中所述还原氧化石墨烯粉末的质量比为1:1。
36.进一步地,所述步骤s3中,十二烷基苯磺酸钠粉末的加入量是所加入的s1中所述酸洗后的碳纳米管与s2中所述还原氧化石墨烯粉末的10倍。
37.进一步地,所述步骤s5中,聚二甲基硅氧烷预聚物和固化剂的质量比为(9
‑
12):1,且旋涂转速为1000
‑
2000rpm,旋涂时长为5
‑
15s。
38.本发明还提供了上述柔性温度传感器阵列在可穿戴设备中作为触觉交互传感中的应用。
39.相比于现有的制备柔性温度传感阵列的方法,本发明特有的pedot:pss/cnts/rgo
复合薄膜和采集线路设计,不仅使得传感阵列的制备过程较为简单和环保,提升了传感阵列的灵敏度、线性度、精度以及响应时间,最小可以感测到的温度为0.1℃,而且能实现将温度
‑
电阻值转化为可视化图像。除此之外,本发明还具有较强的耐久性与稳定性。由于pdms本身具有的生物相容性,低成本,无毒等特性,配合简单的结构和外接电路,极大的降低了传感器的加工难度和制备成本。同时,本发明的传感器还具有低功耗的特点。
附图说明
40.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
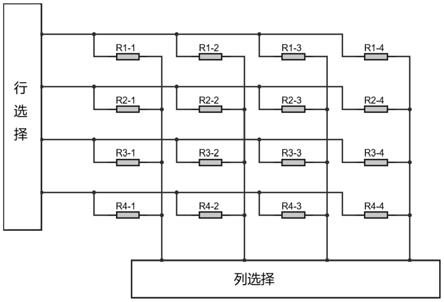
41.图1为本发明实施例提供的一种柔性温度传感器阵列采集线路图;
42.图2为本发明实施例提供的一种柔性温度传感器阵列的俯视图;
43.图3为本发明实施例提供的一种柔性温度传感器阵列的侧视图;
44.图4为本发明实施例提供的一种柔性温度传感器阵列中单个柔性温度传感器的温度
‑
电阻测试数据图;
45.图5为本发明实施例提供的一种柔性温度传感器阵列实物测试图;
46.图6为本发明实施例提供的一种柔性温度传感器阵列制备方法流程图。
47.附图标记:
[0048]1‑
温度传感单元;2
‑
导电银浆;3
‑
铜导线;4
‑
pdms柔性基底。
具体实施方式
[0049]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0050]
面向未来人机交互场景下的应用及开发情况,研究柔性温度传感阵列在监测肢体康复情况、器械与皮肤接触部位温度的分析等功能的多重配合精准实时采集信号,对于提升人机交互过程中的信号处理效率和操作过程中的精准操控以及根据人体情况及时调整机器人工作状态具有重大临床意义,也是亟待解决的基础技术领域应用的重大科学、产业问题。人体能对异常热源表现出不同程度的躲避行为,不仅是因为皮肤能对异常温度进行区别,而且还因为皮肤能分辨异常热源的热量范围。对于机器人皮肤来说,采用碳纳米管(cnts)、还原氧化石墨烯(rgo)和(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))(pedot:pss)复合材料制备的柔性热敏薄膜作为传感单元,将相互独立的多个传感器有规律的集成在同一基底上,传感阵列系统通过直接对阵列中的每个传感单元进行寻址,实时测量阵列中每个器件的电阻值,可以实现感知过程中将温度表现像素化。通过上位机对数据的采集和处理,将温度可视化显示,能够识别有温度物体形状的功能。
[0051]
本发明提出的一种柔性温度传感器阵列,该柔性温度传感器阵列以柔软的pdms作为基底材料,制备pedot:pss/cnts/rgo复合薄膜,并按照需求裁剪成一定的尺寸和数量,然
后按固定间距粘合在基底材料上形成热敏层,连接导线,形成多路复用线路实现阵列化采集。该阵列上传感单元工作时,由于外界为温度变化,复合材料受到温度刺激,材料内部载流子浓度产生改变,导致电阻值发生变化,实现感测压力的功能。当多个传感单元同时感受有温物体时,由于设计的电路具有独立采集的功能,因此每个传感单元都可以对温度单独感应,实现可视化温度的结果。
[0052]
实施例
[0053]
第一步、酸洗碳纳米管:取0.02g碳纳米管粉末加入到装有磁子的圆底烧瓶中,缓慢加入20ml的混合溶液(浓度2mol/l硫酸与30%的过氧化氢的混合溶液,以3:1的体积比例混合)。100℃硅油浴锅加热并搅拌,冷凝回流12小时后,将溶液冷却到室温。随后进行除杂和中性化处理,将溶液用去离子水洗涤,至用ph试纸进行酸碱度比对后溶液成中性。接下来真空抽滤含有碳纳米管的中性混合溶液,直至滤纸上仅余留固体碳纳米管粉末,随后放入真空冷冻干燥箱中干燥过夜即可制得酸洗后的碳纳米管。
[0054]
硫酸与过氧化氢体积比可以在(4
‑
5):1范围内进行调整,swcnt在溶液中极易发生团聚,使用该体积比范围的硫酸/过氧化氢混合溶液,可以有效减少swcnt的团聚,以避免swcnt团聚对材料导电性带来的不良影响。
[0055]
第二步、制备还原氧化石墨烯:将0.5g go(氧化石墨烯)粉末放入烧杯中,加入250ml去离子水,在超声分散仪中进行2个小时设定为200w的超声分散过程,得到超声分散后的go溶液,磁力搅拌go溶液,均匀且速度较慢地滴加100ml 10%浓度的l
‑
抗化血酸溶液,继续搅拌30分钟,得到经过还原反应后的rgo(还原氧化石墨烯)溶液。随后进行洗涤至溶液为中性溶液。采用真空抽滤得到rgo粉末,将粉末放置在冷冻干燥箱中干燥6小时,即可得到实验所用的rgo粉末。
[0056]
抗坏血酸溶液起还原剂的作用,氧化石墨烯粉末与抗坏血酸的比例可以在(0.4
‑
0.6)g:(90
‑
110)ml范围内调整,在该比例范围内,可以很好地消除氧化石墨烯上非必要的官能团,进一步增强材料的导电性。
[0057]
第三步、制备复合溶液:在20ml超纯水中,将0.3ml二甲基亚砜用作导电性增强剂,然后将其加入6ml pedot:pss水溶液(1.3wt%,pedot与pss之比为5:8)。根据所需的含量,加入酸洗后的碳纳米管和实验制备的氧化还原石墨烯(按照1:1的比例)。最后加入10倍碳材混合物重量的sdbs(十二烷基苯磺酸钠)粉末。将混合溶液在搅拌机中充分搅拌混合,随后利用超声分散仪内进行45min的超声(冰水浴)处理。获得pedot:pss/cnts/rgo复合复合溶液。
[0058]
单壁碳纳米管、还原氧化石墨烯和(聚(3,4
‑
乙烯二氧噻吩):聚(苯乙烯磺酸))的质量比优选在1:1:(3
‑
39)范围内,三者的质量比会影响整个柔性传感器的灵敏度、响应速度等性能。十二烷基苯磺酸钠作为表面活性剂,其用量根据实际所添加的碳材料进行调整,为所添加碳材料质量的10倍,能够有效对碳材料进行分散,增强材料的导电性。
[0059]
第四步、配制基底:pdms和固化剂(质量比为10:1)的混合液,2000rpm转速下搅拌30秒后在经过丙酮、无水乙醇和超纯水清洗后的干净硅基片上进行旋涂,获得柔性pdms基底。旋涂前在硅片上均匀喷涂一层脱模剂以方便后续的顺利脱膜成型。
[0060]
第五步、旋涂基底和粘合层:pdms基底层旋涂过程采用转速为1500rpm,旋涂10秒钟,旋涂pdms完成后,附有pdms的硅片放进鼓风干燥箱中以70℃温度固化30分钟。待pdms固
化后,可配制ecoflex粘合膜层,ecoflex a液:b液质量比1:1混合,随后以1300rpm的转速,在附有柔性基底pdms的硅片上旋涂10秒钟,旋涂过程完成后室温下静置7分钟使其半固化。
[0061]
旋涂转速可在1000
‑
2000rpm范围内调整,旋涂时长可在5
‑
15s范围内调整,pdms与固化剂质量比可在(9
‑
12):1范围内调整,旋涂的转速、时长以及pdms与固化剂质量比将影响pdms基底的厚度,从而对柔性温度传感器的灵敏度造成影响。
[0062]
第六步、真空抽滤制备热敏层:采用0.22微米孔径pvdf滤膜实现溶液抽滤,将超声处理后的pedot:pss
‑
cnts
‑
rgo分散液进行抽滤(真空抽滤前在离心机内进行时长2小时转速为5000rpm的离心处理,取沉积液)处理。真空抽滤完成后,放在加热板上,以50℃加热2小时。为增强其电性,可将成型后的膜结构浸没在dmso溶液中12小时,随后60℃下干燥2小时。获得pedot:pss/cnts/rgo复合薄膜。
[0063]
第七步、切割成型:将热敏层固定在平面上,利用autocad软件设计所需要的图形结构导入到激光打印机软件中,经过激光切割机的切割形成1cm2的方形薄膜。
[0064]
第八步、结合基底:将上步切割成型后的复合热敏薄膜,按照图1所示的排列,以固定间距转移到粘性基底上,并确保贴合部位平整且无裂纹、气泡、皱纹等不良接触现象出现。
[0065]
第九步、连接导线:将铜导线按照如(图1)的线路形式,黏附在柔性基底上并与复合薄膜通过速干导电银浆连接。
[0066]
第十步、封装:放进鼓风干燥机中以60℃将导电银浆固化2小时,取出后在传感阵列上进行pdms封装层的旋涂,旋涂过程采用转速为1500rpm,旋涂10秒钟,旋涂pdms封装层后,在鼓风干燥机中以70℃固化30分钟即可完成柔性温度传感阵列的制作。
[0067]
对阵列中的单个柔性温度传感单元(传感器)进行温度测试,获得电阻变化率和温度变化曲线(图4),灵敏度为0.9125%℃
‑1,线性度为99.86%,可以看出传感器具有优秀的灵敏度和线性度。原因是随着温度的上升,灵敏度也发生了变化,原因是随着温度升高,复合物内载流子浓度升高,随着碳纳米管在复合物中形成导电通路,受热后电子定向移动加快,电阻减小。
[0068]
将该温度传感阵列与上位机连接,进行实物测试,如图5所示,可以看出传感器可以实现对有温物体的轮廓感知和温度测量。
[0069]
具体流程可参见图6所示。
[0070]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1