一种基于匀速圆周运动的单站无源定位方法与流程
1.本发明属于雷达技术领域。
背景技术:
2.单站通过对辐射源目标发射的电磁信号的多次观测,结合定位算法可以实现对目标定位。由于在被动定位过程中,单站不会向目标发射侦察信号,实现了自身的电磁隐蔽,而运动单站更具有机动性,因此单站被动定位能适应现代战事需要。随着参数测量能力和处理能力的提高,单站可以通过测量辐射源信号的相位差变化率、多普勒频率、方位角等信息来实现被动定位,然而定位性能受限于测量值的精度以及测量结果的可信度。考虑到辐射源信号方位角量测的精度和可信度更高,因此研究基于方位角量测的单站被动定位仍具有重要意义。
技术实现要素:
3.针对于辐射源信号相位差变化率、多普勒频率等参数测量精度和可信度有待检验,而辐射源信号方位角量测的精度和可信度更高的实际情况,本发明给出一种基于匀速圆周运动的单站无源定位方法,充分利用高精度和高可信度的辐射源信号方位角量测,实现对匀速运动目标的快速定位。
4.本发明提出的一种基于匀速圆周运动的单站无源定位方法,具体步骤如下:
5.在直角坐标系下:
6.步骤1:在t
k
时刻,单站测得匀速运动目标相对于自身的方位角β
k
,其中t
k
=kδ
t
,k=0,1,2,3
…
,δ
t
为测量周期,[x
k
,y
k
]是以单站为相对坐标原点,目标分别在x轴、y轴方向上的距离,n
k
是均值为0、方差为的高斯噪声,tan
‑1(
·
)是反正切运算;
[0007]
步骤2:自t0时刻起,单站以恒定速率v
o
进行匀速圆周运动,机动路线按照如下子步骤进行:
[0008]
步骤2
‑
1:单站初速度方向垂直于单站与目标连线,该连线方向对应方位角量测β0;
[0009]
步骤2
‑
2:单站作向心加速度大小为a1,方向指向目标所在一侧的大圆周运动,并持续时长t1=v
o
θ1/a1,θ1是本段匀速圆周运动对应的圆心角;
[0010]
步骤2
‑
3:单站作向心加速度大小为a2的小圆周运动,并持续时长t2=v
o
θ2/a2,θ2是本段匀速圆周运动对应的圆心角;
[0011]
步骤2
‑
4:单站作向心加速度大小为a3的大圆周运动,并持续时长t3=v
o
θ3/a3,θ3是本段匀速圆周运动对应的圆心角;
[0012]
步骤2
‑
5:单站调整运动方向,使其垂直于当前的单站与目标连线,该连线方向对应最近一次方位角量测β
k
;
[0013]
步骤2
‑
6:单站重复步骤2
‑
2到步骤2
‑
5,直到停止对目标定位;
[0014]
步骤3:自t0时刻起,利用所测方位角β
k
,对目标状态向量x
k
=[x
k
,v
x,k
,y
k
,v
y,k
]
t
进行卡尔曼滤波,实时得到状态估计结果其中,上角标t表示对向量进行转置,[v
x,k
,v
y,k
]是目标相对于单站,分别在x轴、y轴方向上的速度分量,所以,在t
k
时刻,目标绝对状态的估计结果其中,是单站运动状态向量。
[0015]
进一步的,在上述步骤2中,单站匀速圆周运动的加速度大小满足a3=a1,且a1<a2,圆心角θ3=θ1,且θ1≤30
°
<θ2≤120
°
,θ1+θ2+θ3≤180
°
。
[0016]
进一步的,在上述步骤3中,卡尔曼滤波采用伪线性卡尔曼滤波,设置状态初值状态估计误差协方差矩阵初值p0=i4×4,i4×4表示4
×
4的单位阵。
[0017]
本发明的有益效果为:本发明所述方法中,单站采取的大
‑
小
‑
大三段匀速圆周运动,在满足可观测性条件的前提下,保证单站获取较长的基线,即单站运动距离在单站与目标连线的垂直方向上的投影长度,并且单站能够根据目标方位调整运动方向,保证连续的跟踪定位精度不会下降;现有单站定位技术,为了得到长基线并达到定位精度,对单站和目标航向都有特定的运动模式要求,相比之下,本发明所述方法不对目标航向增加限定,自定位开始,输入目标方位角量测,便能得到目标状态向量的估计,随着量测数量的增加,目标状态向量快速收敛;本发明能够有效地解决在只能获取匀速运动目标方位角信息时的单站无源定位问题。
附图说明
[0018]
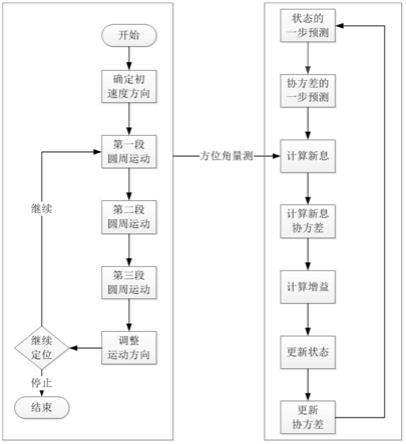
图1是本发明所述一种基于匀速圆周运动的单站无源定位方法流程图。
具体实施方式
[0019]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0020]
假设目标在2维平面(x
‑
y直角坐标系)内作匀速直线运动,航速15节,单站按照本发明所述一种基于匀速圆周运动的单站无源定位方法对目标进行定位,参考图1,所述方法包括:
[0021]
步骤1:在t
k
时刻,单站测得匀速运动目标相对于自身的方位角β
k
,其中t
k
=kδ
t
,k=0,1,2,3
…
,δ
t
为测量周期,[x
k
,y
k
]是以单站为相对坐标原点,目标分别在x轴、y轴方向上的距离,n
k
是均值为0、方差为的高斯噪声,tan
‑1(
·
)是反正切运算;
[0022]
步骤2:自t0时刻起,单站以恒定速率v
o
=20节进行匀速圆周运动,机动路线按照如下子步骤进行:
[0023]
步骤2
‑
1:单站初速度方向垂直于单站与目标连线,该连线方向对应方位角量测β0;
[0024]
步骤2
‑
2:单站作向心加速度大小为a1=0.05m/s2,方向指向目标所在一侧的大圆周运动,并持续时长t1=v
o
θ1/a1,θ1=20
°
是本段匀速圆周运动对应的圆心角;
[0025]
步骤2
‑
3:单站作向心加速度大小为a2=0.5m/s2的小圆周运动,并持续时长t2=v
o
θ2/a2,θ2=120
°
是本段匀速圆周运动对应的圆心角;
[0026]
步骤2
‑
4:单站作向心加速度大小为a3=0.05m/s2的大圆周运动,并持续时长t3=v
o
θ3/a3,θ3=20
°
是本段匀速圆周运动对应的圆心角;
[0027]
步骤2
‑
5:单站调整运动方向,使其垂直于当前的单站与目标连线,该连线方向对应最近一次方位角量测β
k
;
[0028]
步骤2
‑
6:单站重复步骤2
‑
2到步骤2
‑
5,直到停止对目标定位;
[0029]
步骤3:自t0时刻起,利用所测方位角β
k
,对目标状态向量x
k
=[x
k
,v
x,k
,y
k
,v
y,k
]
t
进行卡尔曼滤波,实时得到状态估计结果其中,[v
x,k
,v
y,k
]是目标相对于单站,分别在x轴、y轴方向上的速度分量,所以,在t
k
时刻,目标绝对状态的估计结果的估计结果其中,是单站运动状态向量,卡尔曼滤波采用伪线性卡尔曼滤波:
[0030]
状态方程为:
[0031]
x
k
=a
k,k
‑1x
k
‑1‑
w
k
;
[0032]
量测方程为:
[0033][0034]
其中x
k
=[x
k
,v
x,k
,y
k
,v
y,k
]
t
是在t
k
时刻以单站为坐标原点,目标相对于单站的运动状态向量,上角标t表示对向量进行转置,表示单站的绝对运动状态,表示单站的绝对运动状态,和分别是单站的位置、速度在x轴、y轴方向上的分量,表示目标的绝对运动状态,和分别是目标的位置、速度在x轴、y轴方向上的分量,a
k,k
‑1是从时刻t
k
‑1到t
k
的状态转移矩阵,有:
[0035][0036]
w
k
是外部输入,有:
[0037][0038]
其中和分别是单站的向心加速度在x轴、y轴方向上的分量。具体滤波过程如下:
[0039]
步骤3
‑
1:状态初始化:设置状态初值协方差初值p0=i4×4,i4×4表示4
×
4的单位阵;
[0040]
步骤3
‑
2:状态递推:由t
k
‑1时刻的状态估计结果协方差p
k
‑1和t
k
时刻的量测β
k
,估计t
k
时刻运动状态x
k
,得到估计结果具体过程包括如下子步骤:
[0041]
步骤3
‑2‑
1:计算状态x
k
的一步预测
[0042][0043]
步骤3
‑2‑
2:计算的协方差的一步预测,
[0044][0045]
步骤3
‑2‑
3:计算新息预测值
[0046][0047]
其中h
k
=[sin(β
k
),0,
‑
cos(β
k
),0];
[0048]
步骤3
‑2‑
4:计算的协方差s
k
,
[0049][0050]
步骤3
‑2‑
5:计算滤波器增益g
k
,
[0051][0052]
步骤3
‑2‑
6:更新状态,
[0053][0054]
步骤3
‑2‑
7:更新协方差,
[0055]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1