1.本发明涉及跟踪设备智能化技术领域,具体为一种目标跟踪设备值班日志自动生成方法。
背景技术:2.目标跟踪与状态识别判断日志智能生成技术近些年发展十分火热,在各个民用、军用领域都有应用。传统的人工判别、手工记录方式,需要花费大量的人力资源,面对与日俱增的数据量与突发事件,人工方式也愈加细化和繁琐,且容易带来人为的疏忽与遗漏。因此,建立一个兼具目标状态跟踪、状态识别判断与值班日志智能生成功能的管理系统是解决上述问题的有效途径。
3.其中,对目标的状态或类型识别判断,多年来较为成熟的技术有如下几类:
4.(1)兼备回波起落和调制谱特性的目标状态识别
5.该技术大多是依靠雷达时域一维目标回波波形,来获取波形体系中的囊括的目标特征的数据,从而实现目标分类。以目标回波起落方法来说,欲辨别雷达目标,需要将分辨率较低的雷达侦测到的数据当作点迹目标,而且在侦测过程中,目标回波的相位与幅值根据目标对应雷达的特定姿态的调整而变化。依据目标回波的相位和幅值的变化情况去判别其活动形态,通过进一步提取特征数据,就可以判别目标的飞行状态。以调制谱特性识别来说,是利用目标本身的旋转部件对回波有调制作用的原理,例如喷气发动机的旋转叶片、飞机的旋翼、直升机的螺旋桨等飞行器的往复运动,形成对回波的周期调制。利用 k近邻分类方法对目标进行判别。
6.(2)基于信息融合的方法实现目标状态识别
7.信息融合中的证据理论在面临目标类别复杂、目标之间特征相似的问题时,能够高效地分析处理目标识别中不准确、不确定、不完整信息。例如有研究人员了结合信息融合中的dsmt和d
‑
s多元信息融合规则与近邻分析算法,提出了一种基于信息融合证据理论的目标识别算法。该算法能够有效地处理目标状态判别过程中的不确定信息,并充分地使用了待识别目标的多域复合特征。
8.(3)基于高分辨力雷达成像特性的目标状态识别
9.利用高分辨力雷达或逆合成孔径雷达、合成孔径雷达令目标实行距离成像,进而形成二维雷达目标图像,可得到目标的姿态和形态数据,之后通过图像识别技术来对目标状态进行识别。有研究人员提出了改进自适应进化粒子群(aepso)算法,来优化支持向量机(svm) 参数,建立了状态分类识别模型,通过加强粒子寻优的非线性变化过程提高了高分辨雷达对于目标状态识别的精度,且鲁棒性较强。也有研究人员使用最小二乘法结合svm的雷达目标状态自动判别方法,利用最小二乘法对复杂的高分辨率雷达距离像的特征进行分类。
10.(4)基于统计学方法中决策树模型进行目标状态识别
11.通过构造不同属性分类的节点,不断进行特征选择后度量不同特征属性之间的相
关性,最终建立回归模型进行目标识别。例如利用决策树算法对雷达rcs目标进行分类识别的系统。或是基于决策树多分类支持向量机的目标分类方法,结合决策树算法将欲解决二值分类的支持向量机优化为多类分类器。
12.(5)基于深度学习技术的目标状态识别
13.随着近几年深度学习技术的日益发展,也进入到了雷达目标状态判别领域。有研究人员研究了卷积神经网络在目标状态判别领域的应用,通过开发的卷积因子分析(cfa)概率生成模型,适用于训练数据有限的统计判别。也有人提出了基于雷达高分辨距离像的深度信念网络的目标识别方法,利用t分布随机邻居嵌入进行数据清洗,平衡了hrro的目标数据。此外也有研究人员开发了用于雷达目标自动识别的感知循环注意力网络,结合了主攻时序数据的循环神经网络和注意力机制,不仅增强了识别成功率,也注意到了目标运动与时间的相关性。
14.但是,以上基于深度学习的研究均没有利用到雷达侦测到目标的点迹时空信息,诸如距离、方位、仰角、时间等。有研究人员通过构建基于卷积神经网络的深度学习模型,对距离、方位等进行点迹数据进行预处理与特征提取,以实现目标航迹类型的判别,但是也只使用了二维时空数据的信息,对于飞行目标的高度变化等无法进行判别,且其中采用了adam优化器,面对固定窗口会选取窗口范围内的梯度信息而忽略了窗口外的梯度信息,导致收敛性无法最优。
技术实现要素:15.本发明提供的发明目的在于提供一种目标跟踪设备值班日志自动生成方法。该系统基于qt进行桌面软件开发;使用qt实现雷达数据存储、数据回放分析、任务报告自动生成等重要功能,使雷达站值班流程清晰化、智能化、准确化;提出了一种针对于目标状态自动判别的分类识别算法,本算法根据距离、方位、仰角、时间等雷达目标侦测数据,采用滑动时间窗口提取具有时间相关性的特征点迹,消除特征属性之间的差异化后,根据提取特征点迹数量,分别进行目标机动状态识别和目标航迹类型识别,对于航迹类型识别,采用了提出了一种基于adamax并经过优化的卷积神经网络模型对目标状态进行分类识别,对比传统随机梯度下降法可以更迅速的更新模型权重,进一步提升了模型收敛性和经验性能,并通过实验对比主流目标识别算法,该模型拥有更高的准确率和识别速率,值守人员要对雷达等跟踪设备的跟踪目标的数据进行汇总记录,应当时刻对目标的起始、机动、降高、转向、消失等时刻点进行记录,并定时生成日志文件和报告。
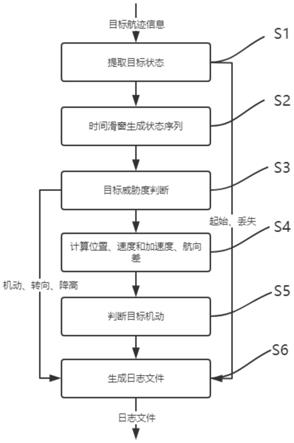
16.为了实现上述效果,本发明提供如下技术方案:一种目标跟踪设备值班日志自动生成方法,包括以下步骤:
17.s1、提取目标状态;
18.s2、时间滑窗生成状态序列;
19.s3、目标威胁度判断;
20.s4、计算位置、速度和加速度、航向差;
21.s5、判断目标机动;
22.s6、生成日志文件。
23.进一步的,根据s1中的操作步骤,所述目标状态主要包括直线机动、转弯机动、俯
冲机动和上仰机动,短时间内的目标机动状态通过计算少量相邻特征点的变化即可进行识别,直线机动和转弯机动主要是对机动的方向的斜率进行判别。
24.进一步的,根据s4中的操作步骤,所述俯冲和上仰机动重点在于高度变化,计算方式如下:已知特征点的距离r、方位a、仰角e,根据球坐标系转换三维坐标系可知:
25.进一步的,根据s4中的操作步骤,所述水平面上斜率的计算如下:
26.进一步的,根据s1中的操作步骤,所述因为雷达数据采集存在一定误差,而且飞行目标因为人为操控和大气气流原因,很难进行完全的直线机动,所以在进行识别时,需要放宽目标是否转弯的阈值,根据三角函数可知,k
ji
=tanθ,其中,θ为斜率直线与x轴的夹角,所以识别阈值就可以设置为k
ji
±
tanφ,及为k
ji
‑
tanφ≤ k
(j+1)j
≤k
ji
+tanφ。
27.进一步的,根据s4中的操作步骤,俯冲与上仰机动识别高度变化δh
ji
的计算公式如下:δh
ji
=z
j
‑
z
i
(i,j=1,2,3
…
、j>i),若δh
ji
> 0,则说明目标在进行上仰机动;若δh
ji
<0,则说明目标在进行俯冲机动,同时,因为客观原因存在,也应该设置判定阈值,即|δh
ji
|≤h。
28.进一步的,根据s4中的操作步骤,所述h为设定的高度变化阈值,高度变化不超过这个阈值则未发生俯冲或上仰机动,至此,可以通过少量特征点,对其相对位置变化进行计算后识别出目标机动状态。
29.进一步的,根据s5中的操作步骤,所述分别进行两次卷积和池化操作是最佳方案,故本文采用卷积层1、池化层1、卷积层2、池化层2、全连接层的网络结构模型。
30.进一步的,根据s5中的操作步骤,所述卷积神经网络结构之后,需要进行模型编译,选择损失函数、和优化器,损失函数用来衡量模型的预测能力,用来定义模型预测结果与实际结果之间的差距,所以得出的交叉熵值越小,两种结果概率的分布越相似,针对于本文所构建的多种航迹类型的分类回归模型,选用交叉熵损失函数,其定义如下其中,x表示为样本数据, y表示为模型实际分类识别结果,a表示为预测结果,n表示为样本数据的数量,优化器利用梯度下降的方式修正模型训练与模型输出的参数值,最优化损失函数,adam是目前大部分分类识别模型的优化器选择,adam计算公式为:m
t
=μ*m
t
‑1+(1
‑
μ)*g
t
,,
31.进一步的,根据s5中的操作步骤,所述m
t
表示为t时刻的指数衰减平均值,n
t
表示为t时刻的平方指数衰减平均值,g
t
表示t时刻的梯度,和分别表示对应的偏差校正,δ
θ
t
表示为参数变化值,μ、 v、∈为超参数值,分别设定为0.9、0.999、10
‑8,η表示为学习率, 设定为0.002,但是adam在收敛性上存在一定问题,所以本发明采用改进自adam的adamax算法,其在adam基础上加入了无穷范数 (infinity norm),为学习率提供了一个范围变化公式,改善了适应性学习算法收敛性不佳的问题,具体改进如下:n
t
=max(v*n
t
‑1,|g
t
|),
32.本发明提供了一种目标跟踪设备值班日志自动生成方法,具备以下有益效果:
33.实际上,该系统基于qt进行桌面软件开发;使用qt实现雷达数据存储、数据回放分析、任务报告自动生成等重要功能,使雷达站值班流程清晰化、智能化、准确化;提出了一种针对于目标状态自动判别的分类识别算法,本算法根据距离、方位、仰角、时间等雷达目标侦测数据,采用滑动时间窗口提取具有时间相关性的特征点迹,消除特征属性之间的差异化后,根据提取特征点迹数量,分别进行目标机动状态识别和目标航迹类型识别,对于航迹类型识别,采用了提出了一种基于adamax并经过优化的卷积神经网络模型对目标状态进行分类识别,对比传统随机梯度下降法可以更迅速的更新模型权重,进一步提升了模型收敛性和经验性能,并通过实验对比主流目标识别算法,该模型拥有更高的准确率和识别速率,值守人员要对雷达等跟踪设备的跟踪目标的数据进行汇总记录,应当时刻对目标的起始、机动、降高、转向、消失等时刻点进行记录,并定时生成日志文件和报告。
附图说明
34.图1为本发明的评估方法示意图;
35.图2为本发明目标状态自动判别算法结构图的示意图。
具体实施方式
36.本发明提供一种技术方案:请参阅图1
‑
2,一种目标跟踪设备值班日志自动生成方法,包括以下步骤:
37.s1、提取目标状态;
38.s2、时间滑窗生成状态序列;
39.s3、目标威胁度判断;
40.s4、计算位置、速度和加速度、航向差;
41.s5、判断目标机动;
42.s6、生成日志文件。
43.具体的,根据s1中的操作步骤,目标状态主要包括直线机动、转弯机动、俯冲机动和上仰机动,短时间内的目标机动状态通过计算少量相邻特征点的变化即可进行识别,直线机动和转弯机动主要是对机动的方向的斜率进行判别。
44.具体的,根据s4中的操作步骤,俯冲和上仰机动重点在于高度变化,计算方式如下:已知特征点的距离r、方位a、仰角e,根据球坐标系转换三维坐标系可知:
45.具体的,根据s4中的操作步骤,水平面上斜率的计算如下:率的计算如下:
46.具体的,根据s1中的操作步骤,因为雷达数据采集存在一定误差,而且飞行目标因为人为操控和大气气流原因,很难进行完全的直线机动,所以在进行识别时,需要放宽目标是否转弯的阈值,根据三角函数可知,k
ji
=tanθ,其中,θ为斜率直线与x轴的夹角,所以识别阈值就可以设置为k
ji
±
tanφ,及为k
ji
‑
tanφ≤k
(j+1)j
≤k
ji
+ tanφ。
47.具体的,根据s4中的操作步骤,俯冲与上仰机动识别高度变化δh
ji
的计算公式如下:δh
ji
=z
j
‑
z
i
(i,j=1,2,3
…
、j>i),若δh
ji
>0,则说明目标在进行上仰机动;若δh
ji
<0,则说明目标在进行俯冲机动,同时,因为客观原因存在,也应该设置判定阈值,即|δh
ji
|≤h。
48.具体的,根据s4中的操作步骤,h为设定的高度变化阈值,高度变化不超过这个阈值则未发生俯冲或上仰机动,至此,可以通过少量特征点,对其相对位置变化进行计算后识别出目标机动状态。
49.具体的,根据s5中的操作步骤,分别进行两次卷积和池化操作是最佳方案,故本文采用卷积层1、池化层1、卷积层2、池化层2、全连接层的网络结构模型。
50.具体的,根据s5中的操作步骤,卷积神经网络结构之后,需要进行模型编译,选择损失函数、和优化器,损失函数用来衡量模型的预测能力,用来定义模型预测结果与实际结果之间的差距,所以得出的交叉熵值越小,两种结果概率的分布越相似,针对于本文所构建的多种航迹类型的分类回归模型,选用交叉熵损失函数,其定义如下其中,x表示为样本数据,y 表示为模型实际分类识别结果,a表示为预测结果,n表示为样本数据的数量,优化器利用梯度下降的方式修正模型训练与模型输出的参数值,最优化损失函数,adam是目前大部分分类识别模型的优化器选择,adam计算公式为:m
t
=μ*m
t
‑1+(1
‑
μ)*g
t
,,
51.具体的,根据s5中的操作步骤,m
t
表示为t时刻的指数衰减平均值,n
t
表示为t时刻的平方指数衰减平均值,g
t
表示t时刻的梯度,和分别表示对应的偏差校正,δθ
t
表示为参数变化值,μ、υ、∈为超参数值,分别设定为0.9、0.999、10
‑8,η表示为学习率,设定为0.002,但是adam在收敛性上存在一定问题,所以本发明采用改进自adam的adamax算法,其在adam基础上加入了无穷范数 (infinity norm),为学习率提供了一个范围变化公式,改善了适应性学习算法收敛性不佳的问题,具体改进如下:n
t
=max(v*n
t
‑1,|g
t
|),
52.根据上述表格数据可以得出,当实施实施例时,通过本发明一种目标跟踪设备值班日志自动生成方法,可以实现对各个方面的关联度进行快速评估计算。
53.本发明提供了一种目标跟踪设备值班日志自动生成方法,包括以下步骤:步骤一、提取目标状态,目标状态主要包括直线机动、转弯机动、俯冲机动和上仰机动,短时间内的目标机动状态通过计算少量相邻特征点的变化即可进行识别,直线机动和转弯机动主要是对机动的方向的斜率进行判别,步骤二、时间滑窗生成状态序列,步骤三、目标威胁度判断,步骤四、计算位置、速度和加速度、航向差,俯冲和上仰机动重点在于高度变化,计算方式如下:已知特征点的距离r、方位a、仰角e,根据球坐标系转换三维坐标系可知:水平面上斜率的计算如下:水平面上斜率的计算如下:因为雷达数据采集存在一定误差,而且飞行目标因为人为操控和大气气流原因,很难进行完全的直线机动,所以在进行识别时,需要放宽目标是否转弯的阈值,根据三角函数可知,k
ji
=tanθ,其中,θ为斜率直线与x轴的夹角,所以识别阈值就可以设置为k
ji
±ꢀ
tanφ,及为k
ji
‑
tanφ≤k
(j+1)j
≤k
ji
+tanφ,δh
ji
=z
j
‑
z
i
(i,j= 1,2,3
…
、j>i),若δh
ji
>0,则说明目标在进行上仰机动;若δh
ji
<0,则说明目标在进行俯冲机动,同时,因为客观原因存在,也应该设置判定阈值,即|δh
ji
|≤h,h为设定的高度变化阈值,高度变化不超过这个阈值则未发生俯冲或上仰机动,至此,可以通过少量特征点,对其相对位置变化进行计算后识别出目标机动状态,步骤五、判断目标机动,根据步骤五中的操作步骤,分别进行两次卷积和池化操作是最佳方案,故本文采用卷积层1、池化层1、卷积层2、池化层2、全连接层的网络结构模型,卷积神经网络结构之后,需要进行模型编译,选择损失函数、和优化器,损失函数用来衡量模型的预测能力,用来定义模型预测结果与实际结果之间的差距,所以得出的交叉熵值越小,两种结果概率的分布越相似,针对于本文所构建的多种航迹类型的分类回归模型,选用交叉熵损失函数,其定义如下交叉熵损失函数,其定义如下其中,x表示为样本数据,y表示为模型实际分类识别结果,a表示为预测结果,n表示为样本数据的数量,优化器利用梯度下降的方式修正模型训练与模型输出的参数值,最优化损失函数,adam是目前大部分分类识别模型的优化器选择,adam 计算公式为:m
t
=μ*m
t
‑1+(1
‑
μ)*g
t
,,m
t
表示为t时刻的指数衰减平均值,n
t
表示为t时刻的平方指数衰减平均值,g
t
表示t 时刻的梯度,和分别表示对应的偏差校正,δθ
t
表示为参数变化值,μ、v、∈为超参数值,分别设定为0.9、0.999、10
‑8,η表示为学习率,设定为0.002,但是adam在收敛性上存在一定问题,所以本发明采用改进自adam的adamax算法,其在adam基础上加入了无穷范数(infinity norm),为学习率提供了一个范围变化公式,改善了适应性学习算法收敛性不佳的问题,具体改进如下: n
t
=max(v*n
t
‑1,|g
t
|),步骤六、生成日志文件,系统整体界面,该系统将雷达数据管理系统与雷达目标状态自动判别相结合,兼备雷达目标状态
自动判别、数据快速存储、及时回放、自动生成值班日志等功能,减少值守人员繁复的工作量和人为失误,使得值班流程清晰化、准确化、智能化,其中研究目标状态自动识别方法对战场瞬息万变的态势和辅助战事决策有重要意义;同时可以作为飞行器实验数据的采集系统,研究人员在学习与分析飞行器性能的过程中可以通过系统回放减少实验次数,节约重复研究的成本。
54.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。