一种分布式光纤振动传感系统及其多点定位方法
1.本发明属于传感及检测技术领域,特别是基于双马赫曾德干涉仪型的一种基于脉冲光调制的分布式光纤振动传感系统及其多点定位方法。
背景技术:
2.光纤传感技术作为传感技术的一个新型分支,因其具有抗电磁干扰、耐腐蚀、质量小、体积小、可复用、可组网等优越特性,被广泛运用在安全检测方面。分布式光纤振动传感技术作为光纤传感技术的一个重要分支,集传感和传输于一体,能够实现光纤传感链路周边压力或振动信号的连续探测,传感距离可以达到数十公里至数百公里。目前,分布式光纤振动传感技术已经广泛应用于油气管道泄漏监测、输电线网安全监测以及周界安全监控等领域。分布式光纤振动传感技术根据其检测原理,可以分为后向散射型和前向干涉型。其中典型的后向散射型分布式光纤振动传感系统主要有相位敏感光时域反射仪型(phase sensitive optical time domain reflectometer,ф
‑
otdr)、布里渊光时域反射仪型(brillouin optical time domain reflectometry,botdr)等。干涉型分布式光纤振动传感系统主要有马赫曾德干涉仪型(mach
‑
zehnder interferometer,mzi)、迈克尔逊干涉仪型(michelson interferometer,mi)等。其中基于双马赫曾德干涉仪型(dual mach
‑
zehnder interferometer,dmzi)的分布式光纤振动传感系统由于具有在较大的空间范围内能连续传感,定位精度高,结构简单,对硬件要求低等诸多优点,近年来成为安全检测领域的重要手段和方法。但由于其利用连续光信号干涉效应进行传感,相比起散射型分布式光纤振动传感系统,dmzi分布式光纤振动传感系统受其定位原理限制,无法同时实现多个扰动信号的定位,限制了其在工程中的应用。
3.为此,需要一种能够弥补双马赫曾德分布式光纤传感系统无法同时实现多个扰动信号的定位的不足,使其能更高效地应用于工程化,从而更广泛地应用于各个安防检测领域。
技术实现要素:
4.本发明目的是设计一种能够工程化应用,结构简单,造价低并且能满足多点定位功能的干涉型分布式光纤振动传感系统及其多点定位方法,解决现有多点定位系统造价较高及监测范围较小的缺点。基于双马赫曾德干涉仪型分布式光纤振动传感系统,本发明提出了一种基于脉冲光调制的双马赫曾德干涉仪型分布式光纤振动传感系统。利用脉冲传感光信号之间存在的时间间隔,对每个输出的脉冲光传感干涉信号进行互相关解调,得到每个脉冲周期内的扰动位置信息。通过合理设置调制脉冲的周期及占空比,可以使得双马赫曾德干涉仪型分布式光纤振动传感系统中实现一定时间间隔内的多点扰动事件的位置解调。
5.为了解决上述技术问题,本发明提出的一种基于脉冲光调制技术的分布式光纤振动传感系统,包括光源、磁光控制机构、光隔离器、光纤耦合器、双马赫曾德干涉仪、数据采
集卡和工控机;
6.其中,所述磁光控制机构包括磁光开关及其驱动装置,所选用的磁光开关通过大电流电脉冲进行控制切换;所述双马赫曾德干涉仪包括分光比为50:50的第二光纤耦合器、第三光纤耦合器,和传感光纤组成,其中所述传感光纤的一端连接第二光纤耦合器,另一端连接第三光纤耦合器;
7.所述驱动装置包括:两个降压模块、单片机、模拟开关以及稳压模块组成,由电源提供的12v电压分为两路输出至两个降压模块,其中一个降压模块输出5v电压至单片机用于支持单片机运行,另一路输出7v电压至模拟开关,所述单片机控制模拟开关将7v电压整形为所需的矩形波信号,经过稳压装置供给磁光开关,触发其切换操作;
8.光源采用窄带连续光激光器,所述光源进入所述磁光控制机构,将连续激光信号调制成具有一定占空比的周期性脉冲光信号,随后,调制后的脉冲光信号射入光隔离器,所述光隔离器的另一端连接第一光纤耦合器,光经过所述第一光纤耦合器后等分成两束光,分别进入第一环形器和第二环形器,两路光沿相反方向传播进入到所述双马赫曾德干涉仪中进行干涉以感知传感光纤沿线的振动信号;其中光的传播路径分别为:从所述第一光纤耦合器射出的一路光进入第一环形器后进入第二光纤耦合器,随后通过传感光纤进入第三光纤耦合器,再进入第二环形器,随后进入第二光电探测器将信号转换为传感电信号;从所述第一光纤耦合器射出的另一路光进入第二环形器后经过传感光纤进入第三光纤耦合器,然后再通过传感光纤进入第二光纤耦合器,然后再进入第一环形器后进入第一光电探测器将信号转换为传感电信号;所述两个光电探测器接收顺逆两个不同方向的干涉光进行光电转换,随后携带有振动信号的两路传感电信号发送至数据采集器进行采集并最终送入工控机,对输出的周期性分段干涉进行互相关解调。
9.其中,所述数据采集器用于对光电探测器传输回来的传感电信号进行采集,所述工控机用于分析解调接收的信号,从而解调出施加在传感光纤上的振动信号的幅频信息。
10.进一步的,所述第一光纤耦合器、第二光纤耦合器和第三光纤耦合器是分光比相同的光纤耦合器。
11.一种基于脉冲光调制技术的分布式光纤振动传感系统的多点定位方法,包括:
12.光源进入到磁光控制机构的磁光开关,与其相连的所述驱动装置对输入的电压进行降压,将降压后的部分低电压输送至磁光开关,剩余电压输送至单片机;
13.所述单片机输出占空比在0.1%~100%范围内可调,频率在10~2000hz范围内可调的方波信号;
14.通过单片机控制所述磁光开关将连续激光信号调制成具有一定占空比的周期性脉冲光信号;
15.切换后的脉冲光信号分为两路,其中一路经由光隔离器4,由第一光纤耦合器后分为两路,一路光进入第一环形器后,经过第二光纤耦合器后经过传感光纤后再经过第三光纤耦合器再返回第二环形器,再经过光电探测器将信号转换为传感电信号;另一路光进入第二环形器后,经第三光纤耦合器射入后经过传感光纤后再经过第二光纤耦合器再返回第一环形器,再经过光电探测器将信号转换为传感电信号,随后携带有振动信号的两路传感电信号发送至数据采集器进行采集并最终送入工控机,对输出的周期性分段干涉进行互相关解调,得到每个脉冲周期内的振动位置信息,实现近似多点定位。
16.其中所述“互相关解调”包括如下步骤:
17.利用数据采集卡采集所述光电探测器传输回来的带有振动信息的传感电信号,并将数据输出至工控机;
18.所述工控机将磁光开关调制过的光源信号的光强表示为周期性方波函数,随后将两传感臂的光强转换为周期性方波函数,
19.根据双马赫曾德干涉仪传感原理,同一光源发出的光沿两相反的方向传播,两个光电探测器接收到的两路光波波形相同且具有很好的相干性,在每个光脉冲内两个光电探测器接收到的干涉光强分别转换为包括余弦项的三角函数;
20.利用两输出信号之间的时延,将两输出信号作互相关运算从而获得沿相反方向传播的两干涉光波的时延值,从而解调出每个脉冲周期内施加在传感光纤上的振动信号的幅频信息。
21.与现有的多点定位系统相比,本发明所述的分布式光纤振动传感系统利用磁光开关将连续的激光信号调制为一定占空比的周期性脉冲光信号,随后对输出的周期性分段干涉进行互相关解调,得到每个脉冲周期内的振动位置信息,实现近似多点定位,所述多点定位方法降低了多点定位需要的成本,适合工程化应用。
附图说明
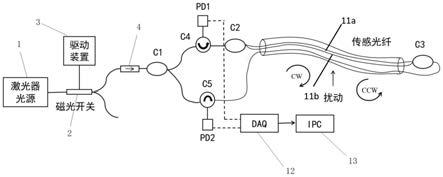
22.图1为基于脉冲光调制的双马赫曾德干涉仪型分布式光纤振动传感系统原理图;
23.图2是本发明所述的驱动装置的原理图。
24.图中:
25.1:光源
ꢀꢀꢀꢀꢀꢀꢀ
2:磁光开关
ꢀꢀꢀꢀꢀꢀ
3:驱动装置
26.4:光隔离器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c1:第一光纤耦合器
ꢀꢀꢀ
c2:第二光纤耦合器
27.c3:第三光纤耦合器
ꢀꢀꢀꢀ
c4:第一环形器
ꢀꢀꢀꢀꢀꢀꢀ
c5:第二环形器
28.pd1:第一光电探测器
ꢀꢀꢀ
pd2:第二光电探测器
ꢀꢀ
11a:第一传感光纤
29.11b:第二传感光纤
ꢀꢀꢀꢀꢀ
12:数据采集卡
ꢀꢀꢀꢀꢀꢀꢀ
13:工控机
具体实施方式
30.下面结合附图和具体实施例对本发明技术方案做进一步详细描述,所描述的具体实施例仅对本发明进行解释说明,并不用以限制本发明。
31.如图1所示,一种基于脉冲光调制技术的分布式光纤振动传感系统,包括光源1、磁光控制机构、光隔离器4、第一光纤耦合器c1、双马赫曾德干涉仪、数据采集卡12和工控机13。其中,所述光源采用波长在1550nm波段,最大输出功率为5mw的窄带连续光激光器,用作系统的光源;所述磁光控制机构包括磁光开关2及其驱动装置3,用于将光源发出的连续激光信号调制为周期性脉冲光信号再输入到所述系统中,所选用的磁光开关2通过大电流电脉冲进行控制切换;所述驱动装置3用于输出周期性电信号,以及控制磁光开关切换;如图2所示,所述驱动装置包括两个降压模块、单片机、模拟开关以及稳压模块组成,由电源提供的12v电压分为两路输出至两个降压模块,将电压分为两部分输出,其中一个降压模块输出5v电压至单片机用于支持单片机运行,另一路输出7v电压至模拟开关,所述单片机控制模拟开关将7v电压整形为所需的矩形波信号,经过稳压装置供给磁光开关,触发其切换操作。
所述双马赫曾德干涉仪包括分光比为50:50的第二光纤耦合器c2、第三光纤耦合器c3,和传感光纤组成,其中所述传感光纤的一端连接第二光纤耦合器c2,另一端连接第三光纤耦合器c3;所述传感光缆11a,11b是采用g.652d通信光缆,用于感知外界扰动信息及传导光信号;所述光隔离器4用于将调制后的脉冲光信号首先经过所述光隔离器4从而保证光的单向通行性,保证激光器不受损伤;所述第一光纤耦合器c1、第二光纤耦合器c2和第三光纤耦合器c3为窗口中心波长在1550nm,分光比为50:50的3db光纤耦合器,其中第一光纤耦合器c1用于将脉冲光分成两束,第二和第三光纤耦合器c2,c3用来将光分别沿相反的两个方向送入传感光纤11a、11b中,并且接受对向的光进行干涉;第一光电探测器pd1和第二光电探测器pd2为铟砷化镓的光电探测器,用于接收1550nm波长在第二、第三光纤耦合器c2,c3处产生的顺时针和逆时针两个方向的干涉光信号转换成电信号;所述数据采集卡12包括两路10msps采集卡,用于实现对两个光电探测器pd1,pd2输出信号的采集,并送入工控机13处理;所述工控机13用于对传感数据进行处理分析,实现振动信号的解调;第一光环形器c4和第二光环形器c5用于将光源输出的光信号正向耦合到传感光路结构中,并将传感光信号反向传送到光电探测器中。
32.一种基于脉冲光调制技术的分布式光纤振动传感系统的多点定位方法,包括:
33.所述光源1射出的连续激光信号被磁光开关2及其驱动装置3调制成具有一定占空比的周期性脉冲光信号,所选用的磁光开关2通过大电流电脉冲进行控制切换,该电路的设计过程为:
34.对输入的12v电压进行降压操作,得到7v电压供给磁光开关输入,5v电压供给单片机;利用proteus软件对stc89c52单片机进行编程,输出占空比在0.1%~100%范围内可调,频率在10~2000hz范围内可调的方波信号;利用模拟开关,通过单片机控制周期性大电流磁光开关作为切换信号。
35.切换后的脉冲光信号分为两路,其中一路经由光隔离器4,经过分光比为50:50的第一光纤耦合器c1后被分为两路,分别进入第一环形器c4和第二环形器c5;光的传播路径分别是c1
‑
c4
‑
c2
‑
c3
‑
c5
‑
pd2和c1
‑
c5
‑
c3
‑
c2
‑
c4
‑
pd1。即,从所述第一光纤耦合器c1射出的一路光进入第一环形器c4后进入第二光纤耦合器c2,随后通过传感光纤11a进入第三光纤耦合器c3,再进入第二环形器c5,随后进入第二光电探测器pd2将信号转换为传感电信号;从所述第一光纤耦合器c1射出的另一路光进入第二环形器c5后经过传感光纤11b进入第三光纤耦合器c3,然后再通过传感光纤11a进入第二光纤耦合器c2,然后再进入第一环形器c4后进入第一光电探测器pd1将信号转换为传感电信号。随后携带有振动信号的两路传感电信号发送至数据采集器12进行采集并最终送入工控机13。
36.所述工控机13随后将磁光开关2调制过的光源信号的光强表示如下:
37.若每个脉冲周期为t,占空比为a,则由磁光开关调制过的光强i1表示为:
[0038][0039]
其中,i0表示光源信号的光强,t表示时间变量,函数表示以t为周期,以a为占空比的周期性方波函数,则两传感臂中光强可表示为
[0040][0041][0042]
根据双马赫曾德干涉仪传感原理,同一光源发出的光沿两相反的方向传播,第g光电探测器pd1和第二光电探测器pd2接收到的两路光波波形相同且具有很好的相干性。在每个光脉冲内第一光电探测器pd1和第二光电探测器pd2处接收到的干涉光强分别为:
[0043][0044][0045][0046][0047]
其中l为传感光纤长度,n是光纤折射率,τ1,τ2分别为光从p点处沿顺时针方向传到探测器pd2和沿逆时针方向传输到探测器pd1所需的时间,x为扰动发生点距离c2的距离,φ(t)和δφ
l
分别为外界扰动造成的传感臂和参考臂两臂的相位差和两臂长度的不等产生的相位延迟。
[0048]
由上式可以看出,两输出信号存在固定的时延,将两输出信号作互相关运算,可得到沿相反方向传播的两干涉光波的时延值为:
[0049][0050]
式中,v为光波在单模光纤中的传播速度,单位m/s,其中v=c/n,c是光在真空中的速度。
[0051]
当有振动信号作用于传感光纤链路上时,其会导致对应传感光纤处的折射率等参量发生改变,从而致使传感信号的相位发生对应的改变,通过检测相位改变引起的幅值信号变换进行处理分析传感事件信号。由于振动发生的位置到两端的第一、第二光电探测器的距离不同,而光波在传感光纤11a,11b中的传播速度一定,因此根据两个光探测器pd1,pd2检测到同一事件的时间差计算出振动发生的位置。在此基础之上,本方法利用长脉冲传感光信号之间的间隔,对输出的周期性分段干涉进行互相关解调,得到每个脉冲周期内的振动位置信息。通过合理设置调制脉冲的周期及占空比,在双马赫曾德分布式光纤传感系统中实现近似的多点定位。
[0052]
尽管上面结合附图对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以做出很多变形,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1