一种空间位姿可调的八驱动六自由度电动振动试验装置的制作方法
1.本发明涉及振动环境试验设备领域,具体是一种空间位姿可调的八驱动六自由度电动振动试验装置。
背景技术:
2.振动是航空航天、运输装备发生故障的主要因素之一。而产品实际处于多维振动环境中,而受限于试验设备能力,传统的试验方法是分别进行单方向的振动试验,但某些军用装备的故障机理是多轴环境特有的,单方向振动试验无法再现其多维振动响应故障。某些惯性测量组件、航空航天发动机、弹头引信、通信设备、车载电源等军工产品,对于多轴振动试验有极高需求。
3.多轴振动试验装置尤其是六自由度振动试验装置具有重大的需求,主要表现有:第一,传统方式的振动试验局限性显现的更加突出,主要体现在一些已经按标准通过了单轴试验的设备(如车载电源、通信设备和导弹引信等)在外场(运输)或者使用(飞行)环境中不能承受多维振动环境;而简易的多轴振动环境试验揭示了单轴试验未能发现的潜在故障。第二,一些运载火箭施加给卫星、飞船和航天飞机的载荷是非对称的,为了进一步减轻结构重量,需要真实地模拟这些多维载荷。第三,惯性测量组合的成功应用需要借助于多维振动试验;第四,重型武器及大型运载火箭、卫星、空间站进行大推力振动试验,单振动台推力无法满足要求时,需要进行多振动台联合激励试验。
4.目前国内外三轴六自由度振动试验装置多采用8个液压振动台的方式实现,这种设备由于采用液压振动台作为激励源存在振动频率低,波形失真大的缺点。也有使用8个电动振动台的方式实现的六自由度振动试验系统,由于使用电动振动台其运动部件对工作平台的位姿控制只通过振动台内部的空气弹簧来实现,而空气弹簧只可以提供驱动力无法提供回拉力。所以,以往所有的8驱动六自由度电动振动台系统,其工作平台的空间位姿无法实现任意控制和调整,这样工作平台往往会偏离平衡位置工作,如线位移方向偏移一定距离,或者具有一定的倾角,极易引起试验失效或者设备运行到极限位置使设备或者试验件损坏。
5.为次研发了一种空间位姿可调的八驱动六自由度电动振动试验装置,通过辅助铰接组件的设计,使工作平台具有12个驱动力来控制平台的空间位姿。
技术实现要素:
6.本发明的目的在于提供一种空间位姿可调的八驱动六自由度电动振动试验装置,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种空间位姿可调的八驱动六自由度电动振动试验装置,包括机架中心底座,所述机架中心底座上方的方形腔体四角部位依次设置有振动台五、振动台六、振动台七和振动台八,机架中心底座一侧壁上固定连接有机架侧底座一,机架中心底座与机架侧底座一
相邻一侧壁上固定连接有机架侧底座二,机架中心底座与机架侧底座一相邻另一侧壁上固定连接有机架侧底座四,机架中心底座与机架侧底座一相对一侧壁上固定连接有机架侧底座三,机架侧底座一、机架侧底座二、机架侧底座三以及机架侧底座四均为方形结构,机架侧底座一与机架侧底座二相邻的直角位通过螺钉连接有角连接座一,机架侧底座二与机架侧底座三相邻的直角位通过螺钉连接有角连接座二,机架侧底座三与机架侧底座四相邻的直角位通过螺钉连接有角连接座三,机架侧底座四与机架侧底座一相邻的直角位通过螺钉连接有角连接座四。
9.作为本发明进一步的方案:所述机架侧底座一、机架侧底座二、机架侧底座三以及机架侧底座四底部两侧均通过螺钉安装有隔振装置,隔振装置为隔振空气弹簧。
10.作为本发明进一步的方案:所述机架侧底座一上方一侧通过固定座固定安装有振动台四,机架侧底座一上位于振动台四一侧通过安装架固定安装有铰接组件四;机架侧底座二上方一侧通过固定座固定安装有振动台三,机架侧底座二上位于振动台三一侧通过安装架固定安装有铰接组件三;机架侧底座三上方一侧通过固定座固定安装有振动台二,机架侧底座三上位于振动台二一侧通过安装架固定安装有铰接组件二;机架侧底座四上方一侧通过固定座固定安装有振动台一,机架侧底座四上位于振动台一一侧通过安装架固定安装有铰接组件一。
11.作为本发明进一步的方案:所述铰接组件一的输出端连接有双球绞解耦装置八,振动台一输出端连接有双球绞解耦装置一;铰接组件二的输出端固定连接有双球绞解耦装置二,振动台二输出端连接有双球绞解耦装置三;铰接组件三的输出端连接有双球绞解耦装置四,振动台三输出端连接有双球绞解耦装置五;铰接组件四的输出端固定连接有双球绞解耦装置六,振动台四输出端连接有双球绞解耦装置七。
12.作为本发明进一步的方案:所述振动台五输出端连接有双球绞解耦装置九,振动台六输出端连接有双球绞解耦装置十,振动台七输出端连接有双球绞解耦装置十一,振动台八输出端连接有双球绞解耦装置十二。
13.作为本发明进一步的方案:所述双球绞解耦装置一、双球绞解耦装置二、双球绞解耦装置三、双球绞解耦装置四、双球绞解耦装置五、双球绞解耦装置六、双球绞解耦装置七、双球绞解耦装置八、双球绞解耦装置九、双球绞解耦装置十、双球绞解耦装置十一以及双球绞解耦装置十二之间均通过双液压球铰座固定有工作平台。
14.作为本发明进一步的方案:所述双液压球铰座包括球铰座本体、活动安装在球铰座本体内部的活动体一和活动安装在球铰座本体内部的活动体二。
15.作为本发明进一步的方案:所述铰接组件一、铰接组件二、铰接组件三以及铰接组件四均包括铰接组件驱动气囊、铰接组件轴承座、铰接组件导向轴承、铰接组件导向轴承盖、铰接组件导向轴和铰接组件连接法兰。
16.作为本发明进一步的方案:所述铰接组件导向轴与铰接组件导向轴承滑动连接,铰接组件导向轴承与铰接组件轴承座通过铰接组件导向轴承盖固定安装,铰接组件连接法兰与铰接组件导向轴焊接固定。
17.与现有技术相比,本发明的有益效果是:
18.本发明中机架中心底座、机架侧底座以及角连接座采用分体组合和环形连接设计,减小了整体运输和加工和安装的难度,而且采用环形紧固结构,具有高的共振频率,可
有效的降低装置的低频共振,辅助铰接组件的使用,可以对工作平台进行空间位姿控制,使平台处于静态和动态的对中位置,避免由于振动台零位偏移引起的过位移故障或试验失效,驱动六自由度振动台采用电动振动台作为驱动,具有振动频率宽、波形失真小的优点。
附图说明
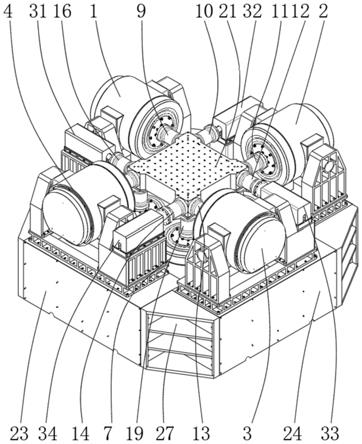
19.图1为本发明的结构示意图。
20.图2为本发明中机架中心底座部位的结构图。
21.图3为本发明中振动台五的结构示意图。
22.图4为本发明中机架中心底座部位的爆炸图。
23.图5为本发明中双液压球铰座的剖视图。
24.图6为本发明中铰接组件的剖视图。
25.图7为本发明中机架中心底座部位的仰视结构图。
26.图中:1、振动台一;2、振动台二;3、振动台三;4、振动台四;5、振动台五;6、振动台六;7、振动台七;8、振动台八;9、双球绞解耦装置一;10、双球绞解耦装置二;11、双球绞解耦装置三;12、双球绞解耦装置四;13、双球绞解耦装置五;14、双球绞解耦装置六;15、双球绞解耦装置七;16、双球绞解耦装置八;17、双球绞解耦装置九;18、双球绞解耦装置十;19、双球绞解耦装置十一;20、双球绞解耦装置十二;21、工作平台;22、机架中心底座;23、机架侧底座一;24、机架侧底座二;25、机架侧底座三;26、机架侧底座四;27、角连接座一;28、角连接座二;29、角连接座三;30、角连接座四;31、铰接组件一;32、铰接组件二;33、铰接组件三;34、铰接组件四;35、隔振装置;36、铰接组件驱动气囊;37、铰接组件轴承座;38、铰接组件导向轴承;39、铰接组件导向轴承盖;40、铰接组件导向轴;41、铰接组件连接法兰;42、活动体一;43、球铰座本体;44、活动体二。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1~7,本发明实施例中,一种空间位姿可调的八驱动六自由度电动振动试验装置,包括机架中心底座22,机架中心底座22上方的方形腔体四角部位依次设置有振动台五5、振动台六6、振动台七7和振动台八8,机架中心底座22一侧壁上固定连接有机架侧底座一23,机架中心底座22与机架侧底座一23相邻一侧壁上固定连接有机架侧底座二24,机架中心底座22与机架侧底座一23相邻另一侧壁上固定连接有机架侧底座四26,机架中心底座22与机架侧底座一23相对一侧壁上固定连接有机架侧底座三25,机架侧底座一23、机架侧底座二24、机架侧底座三25以及机架侧底座四26均为方形结构,机架侧底座一23与机架侧底座二24相邻的直角位通过螺钉连接有角连接座一27,机架侧底座二24与机架侧底座三25相邻的直角位通过螺钉连接有角连接座二28,机架侧底座三25与机架侧底座四26相邻的直角位通过螺钉连接有角连接座三29,机架侧底座四26与机架侧底座一23相邻的直角位通过螺钉连接有角连接座四30。
29.机架中心底座22、机架侧底座以及角连接座采用分体组合和环形连接设计,减小了整体运输和加工和安装的难度,而且采用环形紧固结构,具有高的共振频率,可有效的降低装置的低频共振。振动台五5、振动台六6、振动台七7和振动台八8同时同频率同相位振动可以实现工作平台21沿垂直z方向的线振动,振动台五5和振动台六6与振动台七7和振动台八8同时同频率反相位振动可实现绕x轴的角振动;振动台五5和振动台八8与振动台六6和振动台七7同时同频率反相位振动可实现绕y轴的角振动。
30.其中,机架侧底座一23、机架侧底座二24、机架侧底座三25以及机架侧底座四26底部两侧均通过螺钉安装有隔振装置35,隔振装置35为隔振空气弹簧。隔震空气弹簧用以隔离设备产生的振动对试验场地的影响。
31.其中,机架侧底座一23上方一侧通过固定座固定安装有振动台四4,机架侧底座一23上位于振动台四4一侧通过安装架固定安装有铰接组件四34;机架侧底座二24上方一侧通过固定座固定安装有振动台三3,机架侧底座二24上位于振动台三3一侧通过安装架固定安装有铰接组件三33;机架侧底座三25上方一侧通过固定座固定安装有振动台二2,机架侧底座三25上位于振动台二2一侧通过安装架固定安装有铰接组件二32;机架侧底座四26上方一侧通过固定座固定安装有振动台一1,机架侧底座四26上位于振动台一1一侧通过安装架固定安装有铰接组件一31。
32.振动台一1和振动台三3同时同频率同相位振动可以实现工作平台21沿y轴线振动;振动台二2和振动台四4同时同频率同相位振动可以实现工作平台21沿y轴线振动;垂直方向布置的四个振动台,其与机架中心底座22台面的腔体连接,这样设计可以减小振动台的外包络尺寸,同时提高了垂直振动台的振动传递刚性。
33.其中,铰接组件一31的输出端连接有双球绞解耦装置八16,振动台一1输出端连接有双球绞解耦装置一9;铰接组件二32的输出端固定连接有双球绞解耦装置二10,振动台二2输出端连接有双球绞解耦装置三11;铰接组件三33的输出端连接有双球绞解耦装置四12,振动台三3输出端连接有双球绞解耦装置五13;铰接组件四34的输出端固定连接有双球绞解耦装置六14,振动台四4输出端连接有双球绞解耦装置七15。
34.其中,振动台五5输出端连接有双球绞解耦装置九17,振动台六6输出端连接有双球绞解耦装置十18,振动台七7输出端连接有双球绞解耦装置十一19,振动台八8输出端连接有双球绞解耦装置十二20。
35.其中,双球绞解耦装置一9、双球绞解耦装置二10、双球绞解耦装置三11、双球绞解耦装置四12、双球绞解耦装置五13、双球绞解耦装置六14、双球绞解耦装置七15、双球绞解耦装置八16、双球绞解耦装置九17、双球绞解耦装置十18、双球绞解耦装置十一19以及双球绞解耦装置十二20之间均通过双液压球铰座固定有工作平台21。
36.其中,双液压球铰座包括球铰座本体43、活动安装在球铰座本体43内部的活动体一42和活动安装在球铰座本体43内部的活动体二44。
37.其中,铰接组件一31、铰接组件二32、铰接组件三33以及铰接组件四34均包括铰接组件驱动气囊36、铰接组件轴承座37、铰接组件导向轴承38、铰接组件导向轴承盖39、铰接组件导向轴40和铰接组件连接法兰41。
38.其中,铰接组件导向轴40与铰接组件导向轴承38滑动连接,铰接组件导向轴承38与铰接组件轴承座37通过铰接组件导向轴承盖39固定安装,铰接组件连接法兰41与铰接组
件导向轴40焊接固定。
39.铰接组件驱动气囊36的作用是为平台提供位置调整的驱动力,铰接组件导向轴承38的作用是提供位置调整的导向刚度,布置两个铰接组件导向轴承38可以提供抗弯曲的力矩,十二个个空气弹簧充气可以提供正向驱动力,放气可以降低正向驱动力,通过十二个空气弹簧的协调充放气实现调整工作平台21的线位移和角位移。
40.本实施例中,通过使用辅助的铰接组件,可以对工作平台21进行空间位姿控制,使平台处于静态和动态的对中位置,避免由于振动台零位偏移引起的过位移故障或试验失效。
41.本实施例中,驱动六自由度振动台采用电动振动台作为驱动,具有振动频率宽、波形失真小的优点。
42.本实施例中,双球绞解耦装置可以为液压润滑解耦装置也可以为机械润滑解耦装置,同时也可以替换为球面加平面的解耦器,振动台的谐振源可以是电动振动台也可以是液压振动台和机械振动台,底部隔震空气弹簧可以用整体地基隔震的形式替代,铰接组件导向轴承38可以为其他数目,如1个、2个或更多;铰接组件导向轴承38可以是各种形式,如直线滚珠轴承、自润滑直线轴承或静压直线轴承等。
43.本实施例实现三轴线振动的方式为:控制x轴振动台一1与振动台三3按照指定的振动波形进行振动,且振动台一1和振动台三3的振动控制要求同时同频率同相位;控制y轴振动台二2和振动台四4按照指定的振动波形进行振动,且振动台二2和振动台四4的振动控制要求同时同频率同相位;控制z轴振动台五5、振动台六6、振动台七7、振动台八8按照指定的振动波形进行振动,且振动台五5、振动台六6、振动台七7、振动台的振动控制要求同时同频率同相位。这样,x、y、z三个轴线的线振动在工作平台21处合成为空间三轴线振动。
44.本实施例实现三轴角振动的方式为:控制振动台一1与振动台三3按照指定的振动波形进行振动,且振动台一1与振动台三3的振动控制要求同时同频率同相位,从而形成绕z轴的角振动;控制振动台二2和振动台四4按照指定的振动波形进行振动,且振动台二2和振动台四4的振动控制要求同时同频率同相位,从而形成绕z轴的角振动;控制振动台五5和振动台八8按照指定的振动波形进行振动,且振动台五5和振动台八8的振动控制要求同时同频率同相位,同时控制振动台六6和振动台七7按照指定的振动波形进行振动,且与振动台五5和振动台八8的振动同时同频率反相位,从而形成绕y轴的角振动;或控制振动台五5和振动台六6按照指定的振动波形进行振动,且振动台五5和振动台六6的振动控制要求同时同频率同相位,同时控制振动台七7和振动台八8按照指定的振动波形进行振动,且与振动台五5和振动台六6的振动同时同频率反相位,从而形成绕x轴的角振动。这样,绕x、y、z三个轴线的角振动在工作平台21处合成为空间三轴角振动。
45.本实例空间六自由度的方式为:将上述空间线振动与空间角振动的振动条件叠加,形成线振动加角振动的六自由度振动。以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1