一种地震勘探系统及其采集数据的处理方法与流程
1.本发明属于地震勘探领域,具体涉及一种地震勘探系统及其采集数据的处理方法。
背景技术:
2.地震勘探是目前最主要的石油勘探方法,工作时,通常将传感器节点密集地布设在数十公里的山区和其他复杂的地形勘探区域中,震源激发多处地震波,所有传感器节点实时记录地震数据,形成了密集的地震节点观测系统,实现了对地下地质构造的精细探测。采集任务结束时,所有节点进行集中地震数据下载,然后对大量地震数据进行统一处理和解释。而同步能力差的地震数据将在后期地震数据的处理中会引起相当大的错误,一方面,随着采集时间增加,采集站上晶体振荡器的频率漂移也会带来大量的时间误差累积;另一方面,同步误差随着节点数量的增加而增加。此外,定位信息的结果也极大的影响着地震勘探数据的处理,因此,需要研究用于高密度地震阵列测量的多节点时间同步和高精度定位系统。
3.吉林大学自主研制的gelwsk地震仪通过内置高精度gps接收模块为采集站提供时间服务,以解决分布式传感器节点之间同步精度差的问题,但gps设备的长期运行会消耗大量能量。另外,在某些复杂区域中并没有gps信号,也会给地震勘探工作带来困难。fairfield nodal公司推出的z
‑
land节点地震仪是一种小型、无电缆的便携式存储式地震采集系统,采用gps接收器和本地时钟系统实现地震数据的时间标记,以实现低能耗情况下的多节点时间同步。但由于工作温度、工作状态等的变化,长时间工作时,仪器的本地时钟会漂移并导致较大的误差。此外,上述地震仪在定位处理上定位信息精度不高。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种地震勘探系统及其采集数据的处理方法,本发明的技术方案如下:
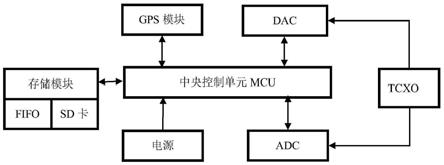
5.一种地震勘探系统,包括控制中心、gps卫星、移动站、基准站和若干采集节点,所述采集节点包括中央控制单元mcu、gps模块、tcxo晶体振荡器、存储模块、电源、dac模块和adc模块;
6.所述电源负责为整个采集节点供电;
7.所述中央控制单元mcu负责管理节点的数据采集任务;
8.所述tcxo晶体振荡器为dac模块与adc模块提供时间服务和标准时间基准;
9.所述dac模块和adc模块为数据采集单元,用于采集地震数据;
10.所述gps模块协同gps卫星用于获取定位信息和时间信息;
11.所述存储模块包括fifo存储器和sd卡,fifo存储器用于零时缓存数据,sd卡用于存储最终的节点地震数据;
12.地震勘探时,将若干采集节点布设于野外各区域,并开启电源进行节点自检;自检
合格后gps模块接收gps卫星同步信号,开始采集地震数据,中央控制单元mcu将采集到的地震数据存入fifo存储器,当fifo存储器中的数据存储达到一定容量后,中央控制单元mcu从fifo存储器中读取数据并以数据块文件的形式存储于sd卡中;勘探结束后回收采集节点,并将各采集节点sd卡中的数据下载聚合到控制中心的数据库中进行后期数据处理。
13.进一步地,所述节点自检的具体流程为:采集节点执行节点自检,自检指标包括检波器电阻、灵敏度、阻尼、自然频率、排列噪声和温度;发送包含测试参数的自检消息到控制中心;控制中心接收每个采集节点的自检消息并判断采集节点是否正常;若采集节点正常则自检合格,控制中心将为每个采集节点配置采集参数并启动采集任务,否则给出警示以提醒相关人员进行故障诊断并手动修复。
14.进一步地,所述gps卫星同步信号包括gps定位信号和gps时间信号,采集节点根据gps定位信号获取伪距单点定位观测数据,并将包含伪距单点定位观测数据的地震数据存储于sd卡中,在不需要高精度定位的情况下,可直接使用该伪距单点定位观测数据获取定位信息,采集节点根据gps时间信号获取gps时间,并将获取到的gps时间作为sd卡中时间同步文件夹的名称,sd卡中每个地震数据块都有时间戳。
15.进一步地,所述adc模块采用型号为ads1282的32位高分辨率adc,ads1282的数据输出引脚drdy与中央控制单元mcu的中断引脚相连,中央控制单元mcu在drdy输出信号的下降沿读取数据;ads1282的同步输入引脚sync施加有连续时钟信号且其频率为数据输出速率的整数倍;地震数据就绪后中央控制单元mcu产生中断,adc将32位数据发送到中央控制单元mcu;当drdy发生中断时,一个数据点就是输出,中央控制单元mcu统计adc数据点的数量,并在采样点达到一定数量时拍摄gps时间和adc数据点数量的快照用于对齐数据;当发生时间同步事件时,adc生成的数据点数量以及准确的gps时间将作为时间同步文件存储于sd卡中。
16.进一步地,所述tcxo晶体振荡器的震荡频率f
o
为16.384mhz
±
0.2ppm,时间t内任意两个采集节点的累积时间误差δt
max
为2tδf
max
/f
o
,δf
max
为晶体振荡器最大偏差;中央控制单元mcu统计fifo存储器的写入次数,当写入次数达到触发时间时会通知gps模块串行数据输出中断和pps中断开始时间同步,触发时间为1/fδt
max
,f为采集节点的数据采样率。
17.进一步地,当采集到的地震数据大小达到预设的数据块大小时,关闭当前文件并创建下一个数据文件,同时将adc数据点的计数和fifo存储器的写入次数计数置零。
18.基于所述地震勘探系统的采集数据的处理方法,包括高精度定位信息获取和数据单元解析,具体步骤如下:
19.步骤1:根据采集到的数据,建立如下单差观测方程:
[0020][0021]
式中,c为光速,分别为移动站、基准站接收载波关于gps卫星j的伪距观测值,值,分别为移动站、基准站接收载波关于gps卫星j的载波相位观测值,分别为移动站、基准站的位置与gps卫星j的距离,δt
r
、δt
b
分别为移动站、基准站的接收机钟
差,λ1、f
1j
分别为接收载波的波长和频率,分别为移动站、基准站关于gps卫星j的整周模糊度,δε
1p,rb
为伪距单差测量噪声,δε
1φ,rb
为载波相位单差测量噪声;将单差观测方程进行伪距、载波相位结合,得进而获得单差模糊度浮点解;
[0022]
步骤2:根据单差观测方程,构建如下双差观测方程:
[0023][0024][0025][0026][0027]
式中,表示t时刻gps卫星i与gps卫星j的载波相位观测值的星间差分,分别表示t时刻移动站、基准站接收载波关于gps卫星i的载波相位观测值,分别表示t时刻移动站、基准站接收载波关于gps卫星j的载波相位观测值,表示t时刻gps卫星i与gps卫星j的距离的星间差分,分别表示t时刻移动站、基准站与gps卫星i的距离,分别表示t时刻移动站、基准站与gps卫星j的距离,表示t时刻gps卫星i与gps卫星j的整周模糊度的星间差分,分别表示t时刻移动站、基准站关于gps卫星i的整周模糊度,分别表示t时刻移动站、基准站关于gps卫星j的整周模糊度;
[0028]
步骤3:采用扩展卡尔曼滤波算法将双差观测方程线性化,扩展卡尔曼滤波算法的模型方程为:
[0029][0030]
式中,x
k
、x
k
分别表示系统的当前状态和上一时刻的状态,φ为状态转移矩阵,b为单位矩阵,w
k
为系统误差向量且为双差观测方程状态向量的协方差矩阵,z
k
表示系统的当前观测值,h为双差观测方程的系数矩阵,e
k
为观测误差向量且e
k
~n(0,r
k
),r
k
为载波相位
‑
伪距测量误差的协方差矩阵;双差观测方程线性化得:
[0031][0032][0033]
式中,q为预测误差的协方差矩阵,k为卡尔曼增益,v1=z
k
‑
h
t
x
k
,x
p
为双差浮点解,σ
p
为状态向量的协方差矩阵;
[0034]
步骤4:在获得双差浮点解和状态向量的协方差矩阵后,基于自反馈因子的蚁群算法求解整周模糊度,获取最终的定位信息;
[0035]
步骤5:解析地震数据单元,并分析获得地震勘探结果;控制中心的服务器根据gps时间信息和时间同步文件对地震数据进行更新和标记,并自动分析每个采集节点的时钟偏移,以保证采集数据的时间准确性,达到多采集节点时间同步的目的。
[0036]
本发明的有益效果是:在时间方面,本发明利用在温度范围内频率的稳定性,使用低电源电压和高度可靠的tcxo晶体振荡器,对整个地震数据进行时时标记;在定位方面,利用载波相位和伪距观测双差组合的方法,以削弱卫星钟差、接收机钟差、电离层延迟误差和对流层延迟误差,获得更高精度的定位。
附图说明
[0037]
图1为本发明中地震勘探系统的框架示意图。
[0038]
图2为本发明中采集节点的组成模块示意图。
[0039]
图3为本发明地震勘探系统的数据采集及处理流程图。
具体实施方式
[0040]
现在结合附图对本发明作进一步详细的说明。
[0041]
如图1所示,本发明地震勘探系统主要包括控制中心、gps卫星、移动站、基准站和若干采集节点,进行地震勘探时,移动站、基准站和若干采集节点被布设于野外。其中,采集节点的组成模块如图2所示,主要包括中央控制单元mcu、gps模块、tcxo晶体振荡器、存储模块、电源、dac模块和adc模块。其中,电源负责为整个采集节点供电;中央控制单元mcu负责管理节点的数据采集任务;tcxo晶体振荡器为dac模块与adc模块提供时间服务和标准时间基准;dac模块和adc模块为数据采集单元,用于采集地震数据;gps模块协同gps卫星用于获取定位信息和时间信息;存储模块包括fifo存储器和sd卡,fifo存储器用于零时缓存数据,sd卡用于存储最终的节点地震数据。
[0042]
图3为本发明地震勘探系统的数据采集及处理流程图,地震勘探时,首先将若干采集节点布设于野外各区域,并开启电源进行节点自检,自检指标包括检波器电阻、灵敏度、阻尼、自然频率、排列噪声和温度。然后将包含测试参数的自检消息发送到控制中心,控制中心接收每个采集节点的自检消息并判断采集节点是否正常。若采集节点正常则自检合格,控制中心将为每个采集节点配置采集参数并启动采集任务,采集节点的gps模块接收gps卫星同步信号,开始采集地震数据,中央控制单元mcu将采集到的地震数据存入fifo存储器,当fifo存储器中的数据存储达到一定容量后,中央控制单元mcu从fifo存储器中读取数据并以数据块文件的形式存储于sd卡中。若采集节点异常,则给出警示以提醒相关人员进行故障诊断并手动修复。勘探结束后回收采集节点,并将各采集节点sd卡中的数据下载聚合到控制中心的数据库中进行后期数据处理。
[0043]
gps卫星同步信号包括gps定位信号和gps时间信号,采集节点根据gps定位信号获取伪距单点定位观测数据,并将包含伪距单点定位观测数据的地震数据存储于sd卡中,在不需要高精度定位的情况下,可直接使用该伪距单点定位观测数据获取定位信息;采集节点根据gps时间信号获取gps时间,并将获取到的gps时间作为sd卡中时间同步文件夹的名称。由于地震数据块的大小是根据特定数据设置的,以一定的采样率采集时,根据文件夹目录和文件名建立数据文件索引,因此sd卡中每个地震数据块都有时间戳。
[0044]
本实施例采集节点的adc模块采用型号为ads1282的32位高分辨率adc,ads1282的数据输出引脚drdy与中央控制单元mcu的中断引脚相连,中央控制单元mcu在drdy输出信号的下降沿读取数据;ads1282的同步输入引脚sync施加有连续时钟信号且其频率为数据输出速率的整数倍;地震数据就绪后中央控制单元mcu产生中断,adc将32位数据发送到中央控制单元mcu;当drdy发生中断时,一个数据点就是输出,中央控制单元mcu统计adc数据点的数量,并在采样点达到一定数量时拍摄gps时间和adc数据点数量的快照用于对齐数据;当发生时间同步事件时,adc生成的数据点数量以及准确的gps时间将作为时间同步文件存储于sd卡中。
[0045]
模数转换同步的精度取决于系统时钟的精度,adc和dac的系统时钟主要依靠晶振。在不同的工作状态下,晶体振荡器经过很长一段时间的振荡后会出现频率漂移,这将导致多采集节点之间的时间异步,进而导致采集的数据出现问题。本实施例所用tcxo晶体振荡器的震荡频率f
o
为16.384mhz
±
0.2ppm,时间t内任意两个采集节点的累积时间误差δt
max
为2tδf
max
/f
o
,δf
max
为晶体振荡器最大偏差;中央控制单元mcu统计fifo存储器的写入次数,当写入次数达到触发时间时会通知gps模块串行数据输出中断和pps中断开始时间同步,触发时间为1/fδt
max
,f为采集节点的数据采样率。当采集到的地震数据大小达到预设的数据块大小时,关闭当前文件并创建下一个数据文件,同时将adc数据点的计数和fifo存储器的写入次数计数置零。
[0046]
本发明地震勘探系统的采集数据的处理包括高精度定位信息获取和数据单元解析,具体的处理步骤如下:
[0047]
步骤1:根据采集到的数据,建立如下单差观测方程:
[0048][0049]
式中,c为光速,分别为移动站、基准站接收载波关于gps卫星j的伪距观测值,值,分别为移动站、基准站接收载波关于gps卫星j的载波相位观测值,分别为移动站、基准站的位置与gps卫星j的距离,δt
r
、δt
b
分别为移动站、基准站的接收机钟差,λ1、f
1j
分别为接收载波的波长和频率,分别为移动站、基准站关于gps卫星j的整周模糊度,δε
1p,rb
为伪距单差测量噪声,δε
1φ,rb
为载波相位单差测量噪声;将单差观测方程进行伪距、载波相位结合,得进而获得单差模糊度浮点解。
[0050]
步骤2:根据单差观测方程,构建如下双差观测方程:
[0051][0052][0053][0054]
[0055]
式中,表示t时刻gps卫星i与gps卫星j的载波相位观测值的星间差分,分别表示t时刻移动站、基准站接收载波关于gps卫星i的载波相位观测值,分别表示t时刻移动站、基准站接收载波关于gps卫星j的载波相位观测值,表示t时刻gps卫星i与gps卫星j的距离的星间差分,分别表示t时刻移动站、基准站与gps卫星i的距离,分别表示t时刻移动站、基准站与gps卫星j的距离,表示t时刻gps卫星i与gps卫星j的整周模糊度的星间差分,分别表示t时刻移动站、基准站关于gps卫星i的整周模糊度,分别表示t时刻移动站、基准站关于gps卫星j的整周模糊度。
[0056]
步骤3:采用扩展卡尔曼滤波算法将双差观测方程线性化,扩展卡尔曼滤波算法的模型方程为:
[0057][0058]
式中,x
k
、x
k
分别表示系统的当前状态和上一时刻的状态,φ为状态转移矩阵,b为单位矩阵,w
k
为系统误差向量且为双差观测方程状态向量的协方差矩阵,z
k
表示系统的当前观测值,h为双差观测方程的系数矩阵,e
k
为观测误差向量且e
k
~n(0,r
k
),r
k
为载波相位
‑
伪距测量误差的协方差矩阵;双差观测方程线性化得:
[0059][0060][0061]
式中,q为预测误差的协方差矩阵,k为卡尔曼增益,v1=z
k
‑
h
t
x
k
,x
p
为双差浮点解,σ
p
为状态向量的协方差矩阵。
[0062]
步骤4:在获得双差浮点解和状态向量的协方差矩阵后,基于自反馈因子的蚁群算法求解整周模糊度,获取最终定位信息。
[0063]
步骤5:解析地震数据单元,并分析获得地震勘探结果;控制中心的服务器根据gps时间信息和时间同步文件对地震数据进行更新和标记,并自动分析每个采集节点的时钟偏移,以保证采集数据的时间准确性,达到多采集节点时间同步的目的。
[0064]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1