基于轮速脉冲的车辆定位校验方法与流程
1.本发明涉及车辆定位技术领域,尤其涉及一种基于轮速脉冲的车辆定位校验方法。
背景技术:
2.车辆定位系统是自动泊车系统的重要组成部分,定位系统的精度直接影响自动泊车的性能。目前用于车辆的定位系统主要有基于车辆轮速脉冲的定位、基于视觉/激光雷达slam定位、基于惯性导航单元imu的定位以及卫星导航定位。目前用于自动泊车的定位系统多是基于轮速脉冲的定位系统,其通过计算车辆行驶脉冲数与轮胎脉冲间距离的乘积确定车辆行驶的有效距离,理论上可以提供较高的定位精度,但是由于路面平整度的原因,基于轮胎脉冲计算的车辆行驶距离仍然存在一定的误差,且误差随行驶路程的积累逐渐增大。
3.因此,亟需一种基于轮速脉冲的车辆定位校验方法。
技术实现要素:
4.本发明的目的是提供一种基于轮速脉冲的车辆定位校验方法,以解决上述现有技术中的问题,能够解决路面不平以及车辆经过减速带、坑洼路面时定位不准的问题。
5.本发明提供了一种基于轮速脉冲的车辆定位校验方法,其中,包括以下步骤:
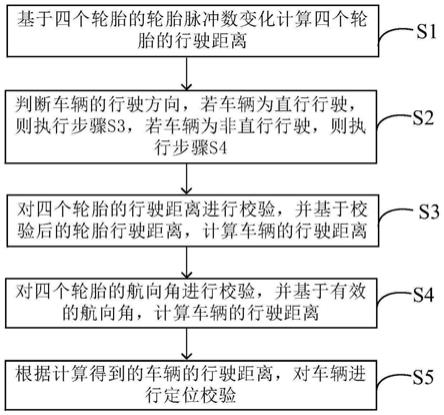
6.步骤s1、基于四个轮胎的轮胎脉冲数变化计算四个轮胎的行驶距离;
7.步骤s2、判断车辆的行驶方向,若车辆为直行行驶,则执行步骤s3,若车辆为非直行行驶,则执行步骤s4;
8.步骤s3、对四个轮胎的行驶距离进行校验,并基于校验后的轮胎行驶距离,计算车辆的行驶距离;
9.步骤s4、对四个轮胎的航向角进行校验,并基于有效的航向角,计算车辆的行驶距离;
10.步骤s5、根据计算得到的车辆的行驶距离,对车辆进行定位校验。
11.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述步骤s1、基于四个轮胎的轮胎脉冲数变化计算四个轮胎的行驶距离,具体包括:
12.通过脉冲传感器读取不同时刻四个的轮胎脉冲数,并计算四个轮胎的轮胎脉冲数变化;
13.根据四个轮胎的轮胎脉冲数变化分别计算四个轮胎的行驶距离。
14.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述步骤s2、判断车辆的行驶方向,具体包括:
15.判断车辆的方向盘转角是否小于设定的转角阈值;
16.若方向盘转角小于设定的转角阈值,则确定车辆的行驶方向为直行;
17.若方向盘转角大于等于设定的转角阈值,则确定车辆的行驶方向为非直行。
18.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述步骤s3、对
四个轮胎的行驶距离进行校验,并基于校验后的轮胎行驶距离,计算车辆的行驶距离,具体包括:
19.计算车辆的四个轮胎的平均行驶距离;
20.根据四个轮胎的平均行驶距离,分别对四个轮胎的行驶距离进行校验;
21.若四个轮胎的行驶距离校验结果均合格,则基于四个轮胎的行驶距离计算车辆的行驶距离;
22.若存在行驶距离校验不合格的轮胎,则基于校验后的轮胎行驶距离,计算车辆的行驶距离。
23.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述计算车辆的四个轮胎的平均行驶距离,具体包括:
24.通过以下公式所述计算车辆的四个轮胎的平均行驶距离,
25.δs1=(δs
fl
+δs
fr
+δs
rl
+δs
rr
)/4
26.其中,δs1表示四个轮胎的平均行驶距离,δs
fl
表示车辆左前轮的行驶距离,δs
fr
表示车辆右前轮的行驶距离、δs
rl
表示车辆左后轮的行驶距离,δs
rr
表示车辆右后轮的行驶距离;
27.所述根据四个轮胎的平均行驶距离,分别对四个轮胎的行驶距离进行校验,具体包括:
28.计算待校验轮胎的行驶距离与四个轮胎的平均行驶距离的差值的绝对值,
29.δl
c
=|δs1‑
δs
c
|
30.其中,δs
c
表示待校验轮胎的行驶距离,δl
c
表示δs1与δs
c
的差值的绝对值;
31.计算其他三个车轮的行驶距离与四个轮胎的平均行驶距离差值的绝对值之和δl;
32.根据|δl/3
‑
δl
c
|的大小确定待校验轮胎的行驶距离是否校验合格;
33.若|δl/3
‑
δl
c
|>l
′
,则待校验轮胎的行驶距离校验合格,其中,l'表示距离阈值;
34.若|δl/3
‑
δl
c
|≤l
′
,则待校验轮胎的行驶距离校验不合格。
35.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述若存在行驶距离校验不合格的轮胎,则基于校验后的轮胎行驶距离,计算车辆的行驶距离,具体包括:
36.若行驶距离校验不合格的轮胎的数量为一个,则计算车辆的其他三个轮胎的平均行驶距离,作为车辆的行驶距离;
37.若行驶距离校验不合格的轮胎的数量为多个,则根据四个轮胎的平均行驶距离和障碍物的长度计算车辆的行驶距离。
38.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述根据四个轮胎的平均行驶距离和障碍物的长度计算车辆的行驶距离,具体包括:
39.计算两前轮的行驶距离之和,
40.δs
f
=δs
fl
+δs
fr
41.其中,δs
f
表示两前轮的行驶距离之和;
42.计算两后轮的行驶距离之和:
43.δs
r
=δs
rl
+δs
rr
44.其中,δs
r
表示两前轮的行驶距离之和;
45.若δs
r
‑
δs
f
>l1且车辆行驶距离d后满足δs
f
‑
δs
r
>l1,则通过以下公式计算车辆行驶距离,
46.δs=δs1‑
l147.其中,δs1表示行驶距离校验不合格的轮胎的数量为多个时的车辆的平均行驶距离,l1表示障碍物的长度,d表示车辆轴距,δs1表示四个轮胎的平均行驶距离。
48.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述步骤s4、对四个轮胎的航向角进行校验,并基于有效的航向角,计算车辆的行驶距离,具体包括:
49.计算车辆的四个轮胎的平均航向角变化;
50.根据四个轮胎的平均航向角变化,分别对四个轮胎的航向角进行校验;
51.根据校验合格的航向角和车辆后轴中心点转弯半径,计算车辆的行驶距离。
52.如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述计算车辆的四个轮胎的平均航向角变化,具体包括:
53.根据前轮转角和车辆轴距,计算车辆后轴中心点转弯半径,
54.r=d/tanθ
55.其中,r表示车辆后轴中心点转弯半径,d表示车辆轴距,θ表示前轮转角;
56.根据车辆后轴中心点转弯半径、车辆前轮轮距、车辆后轮轮距、车辆轴距分别计算车辆的四个轮胎的转弯半径,分别为车辆左前轮的转弯半径r
fl
、车辆右前轮的转弯半径r
fr
、车辆左后轮的转弯半径r
rl
,车辆右后轮的转弯半径r
rr
;
57.基于每个轮胎的行驶距离和轮胎的转弯半径,分别计算每个轮胎的航向角变化,
[0058][0059][0060][0061][0062]
其中,δθ
fl
表示车辆左前轮的航向角变化、δθ
fr
表示车辆右前轮的航向角变化、δθ
rl
表示车辆左后轮的航向角变化,δθ
rr
表示车辆右后轮的转弯半径;
[0063]
计算四个轮胎的航向角变化的均值,作为四个轮胎的平均航向角变化,δθ=(δθ
fl
+δθ
fr
+δθ
rr
+δθ
rl
)/4
[0064]
其中,δθ表示四个轮胎的平均航向角变化。
[0065]
如上所述的基于轮速脉冲的车辆定位校验方法,其中,优选的是,所述根据四个轮胎的平均航向角变化,分别对四个轮胎的航向角进行校验,具体包括:
[0066]
计算待校验轮胎的航向角变化与四个轮胎的平均航向角变化的差值的绝对值,
[0067]
δα
c
=|δθ
‑
δθ
c
|
[0068]
其中,δθ
c
表示待校验轮胎的航向角变化,δα
c
表示δθ与δθ
c
的差值的绝对值;
[0069]
计算其他三个车轮的航向角变化与四个轮胎的平均航向角变化差值的绝对值之和δα;
[0070]
根据|δα/3
‑
δθ
c
|的大小确定待校验轮胎的航向角是否校验合格;
[0071]
若|δα/3
‑
δθ
c
|>β,则待校验轮胎的航向角校验合格,其中,β表示角度阈值;
[0072]
若|δα/3
‑
δθ
c
|≤β,则待校验轮胎的航向角校验不合格,
[0073]
所述根据校验合格的航向角和车辆后轴中心点转弯半径,计算车辆的行驶距离,具体包括:
[0074]
计算车辆的航向角校验合格的三个轮胎的平均航向角;
[0075]
将车辆的航向角校验合格的三个轮胎的平均航向角与车辆后轴中心点转弯半径相乘,得到车辆的行驶距离。
[0076]
本发明的基于轮速脉冲的车辆定位校验方法,通过在直行行驶时,对轮胎的行驶距离进行校验,以及在非直行行驶时,对轮胎的航向角进行校验,并基于校验结果计算车辆的行驶距离,这样当车辆在低速行驶时,可以基于轮胎脉冲计算车辆的行驶距离,进而对车辆进行定位,且车辆的定位精度不随路面状况发生变化。
附图说明
[0077]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
[0078]
图1为本发明提供的基于轮速脉冲的车辆定位校验方法的实施例的流程图。
具体实施方式
[0079]
现在将参照附图来详细描述本公开的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。本公开可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本公开透彻且完整,并且向本领域技术人员充分表达本公开的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示例性的,而不是作为限制。
[0080]
本公开中使用的“第一”、“第二”:以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
[0081]
在本公开中,当描述到特定部件位于第一部件和第二部件之间时,在该特定部件与第一部件或第二部件之间可以存在居间部件,也可以不存在居间部件。当描述到特定部件连接其它部件时,该特定部件可以与所述其它部件直接连接而不具有居间部件,也可以不与所述其它部件直接连接而具有居间部件。
[0082]
本公开使用的所有术语(包括技术术语或者科学术语)与本公开所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用字典中定义的术语应当被解释为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或极度形式化的意义来解释,除非这里明确地这样定义。
[0083]
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,技术、方法和设备应当被视为说明书的一部分。
[0084]
现有轮速定位是基于车辆两后轮车辆行驶的脉冲数来计算车辆的行驶距离,车辆行驶距离计算公式为:
[0085]
δs=(δs
r
+δs
l
)/2
[0086]
δθ=(δs
r
+δs
l
)/l
[0087]
δx=δs
·
cos(θ+δθ/2)
[0088]
δy=δs
·
sin(θ+δθ/2)
[0089]
其中:δs为单位时间内车辆行驶距离,δs
r
为右后轮车辆行驶距离,δs
l
为左后轮车辆行驶距离,l为车辆后轮轮距,θ为车辆航向角,δθ为单位时间内车辆航向角变化。
[0090]
现有技术在较平整路面,且为短距离行驶时车辆可以获得较高的定位精度,但是当路面有凸起或者路面有凹坑以及车辆通过减速带、路牙时会对车辆的定位系统造成很大的影响,直接影响定位的精度。
[0091]
如图1所示,本实施例提供的基于轮速脉冲的车辆定位校验方法在实际执行过程中,具体包括如下步骤:
[0092]
步骤s1、基于四个轮胎的轮胎脉冲数变化计算四个轮胎的行驶距离。
[0093]
在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s1具体可以包括:
[0094]
步骤s11、通过脉冲传感器读取不同时刻四个的轮胎脉冲数,并计算四个轮胎的轮胎脉冲数变化。
[0095]
步骤s12、根据四个轮胎的轮胎脉冲数变化分别计算四个轮胎的行驶距离。
[0096]
步骤s2、判断车辆的行驶方向,若车辆为直行行驶,则执行步骤s3,若车辆非直行行驶(即为转弯行驶),则执行步骤s4。
[0097]
具体地,判断车辆的方向盘转角是否小于设定的转角阈值,若方向盘转角小于设定的转角阈值,则确定车辆的行驶方向为直行;若方向盘转角大于等于设定的转角阈值,则确定车辆的行驶方向为非直行。
[0098]
步骤s3、对四个轮胎的行驶距离进行校验,并基于校验后的轮胎行驶距离,计算车辆的行驶距离。
[0099]
通过对四个轮胎的行驶距离进行校验,来分别判定4个轮胎的行驶距离值是否有效。在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s3具体可以包括:
[0100]
步骤s31、计算车辆的四个轮胎的平均行驶距离。
[0101]
具体地,通过以下公式所述计算车辆的四个轮胎的平均行驶距离,
[0102]
δs1=(δs
fl
+δs
fr
+δs
rl
+δs
rr
)/4
[0103]
其中,δs1表示四个轮胎的平均行驶距离,δs
fl
表示车辆左前轮的行驶距离,δs
fr
表示车辆右前轮的行驶距离、δs
rl
表示车辆左后轮的行驶距离,δs
rr
表示车辆右后轮的行驶距离。
[0104]
步骤s32、根据四个轮胎的平均行驶距离,分别对四个轮胎的行驶距离进行校验。
[0105]
在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s32
具体可以包括:
[0106]
步骤s321、计算待校验轮胎的行驶距离与四个轮胎的平均行驶距离的差值的绝对值,
[0107]
δl
c
=|δs1‑
δs
c
|
[0108]
其中,δs
c
表示待校验轮胎的行驶距离,δl
c
表示δs1与δs
c
的差值的绝对值。
[0109]
步骤s322、计算其他三个车轮的行驶距离与四个轮胎的平均行驶距离差值的绝对值之和δl。
[0110]
步骤s323、根据|δl/3
‑
δl
c
|的大小确定待校验轮胎的行驶距离是否校验合格。
[0111]
步骤s324、若|δl/3
‑
δl
c
|>l
′
,则待校验轮胎的行驶距离校验合格,其中,l'表示距离阈值。
[0112]
步骤s325、若|δl/3
‑
δl
c
|≤l
′
,则待校验轮胎的行驶距离校验不合格。
[0113]
步骤s33、若四个轮胎的行驶距离校验结果均合格,则基于四个轮胎的行驶距离计算车辆的行驶距离。
[0114]
具体地,将四个轮胎的行驶距离的平均值作为车辆的行驶距离。
[0115]
步骤s34、若存在行驶距离校验不合格的轮胎,则基于校验后的轮胎行驶距离,计算车辆的行驶距离。
[0116]
具体地,若行驶距离校验不合格的轮胎的数量为一个,则计算车辆的其他三个轮胎的平均行驶距离,作为车辆的行驶距离。
[0117]
下面以左前轮为例进行说明。首先计算左前轮胎的行驶距离与四轮平均行驶距离的差值δl
fl
=|δs1‑
δs
fl
|,其他三个轮胎,即右前轮胎、右后轮胎、左后轮胎与四轮平均行驶距离差值的绝对值之和为:
[0118]
δl=|δs
‑
δs
fr
|+|δs
‑
δs
rr
|+|δs
‑
δs
rl
|
[0119]
若|δl/3
‑
δl
fl
|>l
′
,则δs2=(δs
fr
+δs
rl
+δs
rr
)/3,其中,δs2表示行驶距离校验不合格的轮胎的数量为一个时的车辆的平均行驶距离。
[0120]
若行驶距离校验不合格的轮胎的数量为多个,则根据四个轮胎的平均行驶距离和障碍物的长度计算车辆的行驶距离。
[0121]
在行驶距离校验不合格的轮胎的数量为多个的情况下,所述步骤s34具体包括:
[0122]
步骤s341、计算两前轮的行驶距离之和,
[0123]
δs
f
=δs
fl
+δs
fr
[0124]
其中,δs
f
表示两前轮的行驶距离之和;
[0125]
步骤s342、计算两后轮的行驶距离之和:
[0126]
δs
r
=δs
rl
+δs
rr
[0127]
其中,δs
r
表示两前轮的行驶距离之和;
[0128]
步骤s343、若δs
r
‑
δs
f
>l1且车辆行驶距离d后满足δs
f
‑
δs
r
>l1,此时判断为车辆通过障碍物,例如为减速带或坑洼路面,此时通过以下公式计算车辆行驶距离,
[0129]
δs=δs1‑
l1[0130]
其中,δs1表示行驶距离校验不合格的轮胎的数量为多个时的车辆的平均行驶距离,l1表示障碍物的长度,d表示车辆轴距,δs1表示四个轮胎的平均行驶距离。
[0131]
步骤s4、对四个轮胎的航向角进行校验,并基于有效的航向角,计算车辆的行驶距
离。
[0132]
在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s4具体可以包括:
[0133]
步骤s41、计算车辆的四个轮胎的平均航向角变化。
[0134]
在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s41具体可以包括:
[0135]
步骤s411、根据前轮转角和车辆轴距,计算车辆后轴中心点转弯半径,
[0136]
r=d/tanθ
[0137]
其中,r表示车辆后轴中心点转弯半径,d表示车辆轴距,θ表示前轮转角。
[0138]
步骤s412、根据车辆后轴中心点转弯半径、车辆前轮轮距、车辆后轮轮距、车辆轴距分别计算车辆的四个轮胎的转弯半径,分别为车辆左前轮的转弯半径r
fl
、车辆右前轮的转弯半径r
fr
、车辆左后轮的转弯半径r
rl
,车辆右后轮的转弯半径r
rr
。
[0139]
步骤s413、基于每个轮胎的行驶距离和轮胎的转弯半径,分别计算每个轮胎的航向角变化,
[0140][0141][0142][0143][0144]
其中,δθ
fl
表示车辆左前轮的航向角变化、δθ
fr
表示车辆右前轮的航向角变化、δθ
rl
表示车辆左后轮的航向角变化,δθ
rr
表示车辆右后轮的转弯半径。
[0145]
步骤s414、计算四个轮胎的航向角变化的均值,作为四个轮胎的平均航向角变化,
[0146]
δθ=(δθ
fl
+δθ
fr
+δθ
rr
+δθ
rl
)/4
[0147]
其中,δθ表示四个轮胎的平均航向角变化。
[0148]
步骤s42、根据四个轮胎的平均航向角变化,分别对四个轮胎的航向角进行校验。
[0149]
通过对四个轮胎的航向角进行校验,可以确定每个轮胎的航向角变化值是否可用于计算车辆的航向角。在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s42具体可以包括:
[0150]
步骤s421、计算待校验轮胎的航向角变化与四个轮胎的平均航向角变化的差值的绝对值,
[0151]
δα
c
=|δθ
‑
δθ
c
|
[0152]
其中,δθ
c
表示待校验轮胎的航向角变化,δα
c
表示δθ与δθ
c
的差值的绝对值。
[0153]
步骤s422、计算其他三个车轮的航向角变化与四个轮胎的平均航向角变化差值的绝对值之和δα。
[0154]
步骤s423、根据|δα/3
‑
δθ
c
|的大小确定待校验轮胎的航向角是否校验合格。
[0155]
步骤s424、若|δα/3
‑
δθ
c
|>β,则待校验轮胎的航向角校验合格,其中,β表示角度阈值。
[0156]
步骤s425、若|δα/3
‑
δθ
c
|≤β,则待校验轮胎的航向角校验不合格。
[0157]
步骤s43、根据校验合格的航向角和车辆后轴中心点转弯半径,计算车辆的行驶距离。
[0158]
在本发明的基于轮速脉冲的车辆定位校验方法的一种实施方式中,所述步骤s43具体可以包括:
[0159]
步骤s431、计算车辆的航向角校验合格的三个轮胎的平均航向角。
[0160]
步骤s432、将车辆的航向角校验合格的三个轮胎的平均航向角与车辆后轴中心点转弯半径相乘,得到车辆的行驶距离。
[0161]
仍以左前轮胎为例进行说明,首先计算左前轮胎的航向角变化与四个轮胎的平均航向距离的差值δα
fl
=|δθ
‑
δθ
fl
|,
[0162]
若|δα
fl
‑
(|δθ
‑
δθ
fr
|+|δθ
‑
δθ
rr
|+|δθ
‑
δθ
rl
|)/3|>β,则车辆的航向角校验合格的三个轮胎的平均航向角为δθ
′
=(δθ
fr
+δθ
rr
+δθ
rl
)/3,此时车辆的行驶距离δs3=δθ
′
*r,δs3表示在车辆非直行行驶时,根据航向角校验合格的航向角计算得到车辆的平均行驶距离。
[0163]
步骤s5、根据计算得到的车辆的行驶距离,对车辆进行定位校验。
[0164]
在通过步骤s3或者步骤s4得到车辆的行驶距离后,可以根据车辆的行驶距离可以对车辆进行精准定位,本发明的车辆定位校验方法可用于车辆低速自动泊车及无卫星定位时给车辆进行定位。
[0165]
本发明实施例提供的基于轮速脉冲的车辆定位校验方法,通过在直行行驶时,对轮胎的行驶距离进行校验,以及在非直行行驶时,对轮胎的航向角进行校验,并基于校验结果计算车辆的行驶距离,这样当车辆在低速行驶时,可以基于轮胎脉冲计算车辆的行驶距离,进而对车辆进行定位,且车辆的定位精度不随路面状况发生变化。
[0166]
至此,已经详细描述了本公开的各实施例。为了避免遮蔽本公开的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
[0167]
虽然已经通过示例对本公开的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本公开的范围。本领域的技术人员应该理解,可在不脱离本公开的范围和精神的情况下,对以上实施例进行修改或者对部分技术特征进行等同替换。本公开的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1