一种基于直线矢量方向及长度匹配的单站姿态处理精度确定方法与流程
1.本发明涉及常规兵器试验测试领域,特别是涉及靶场光学姿态测量领域。
背景技术:
2.在靶场光学姿态测量中,光学单站姿态处理通常基于多特征点或者基于长宽比等近似模型进行处理。基于多特征点处理方法的不足在于由于目标高速运动、视角变换、离焦等原因,多特征点并不显著,另外,靶场通常为中长远距离姿态处理,实际成像小,像点之间相关性太强。基于近似模型的算法条件比较苛刻,很难适用于靶场高精度测量。基于直线特征的方法相对而言,更适合于靶场中长远姿态处理。基于直线特征的方法在实际测量过程中,必须在方案策划以及事后处理前对精度进行预估,故必须建立基于直线矢量物像映射的单站姿态处理精度确定方法。
技术实现要素:
3.为了克服现有技术的不足,本发明提供一种基于直线矢量方向及长度匹配的单站姿态处理精度确定方法,以直线矢量方向及长度匹配的单站姿态处理模型为基础,从直线矢量物像映射关系涉及的主要影响因子出发,由分项后综合的方式,建立了轴对称回转体单站姿态处理的精度确立模型,为实际测试前场景模拟、事后姿态处理提供比较可靠的理论依据。
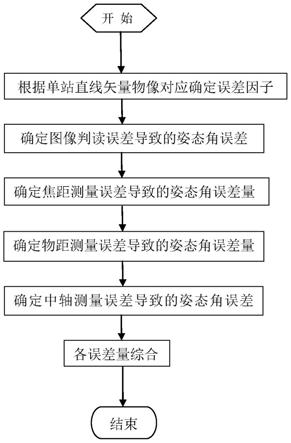
4.本发明解决其技术问题所采用的技术方案包括以下步骤:
5.第一步,根据单站姿态处理中轴矢量物像方向及长度映射关系,确定中轴矢量理论投影(y、z)与实际投影(y
像
、z
像
)的变化量对等关系其中,l为中轴实际长度,f为摄像机焦距,μ为像元尺寸,u为物距;
6.第二步,计算直线矢量方向及像长因单位判读误差(δy
像
δz
像
)导致的最大量化误差,
7.第三步,计算中轴理论投影随判读误差导致的误差量(δy
p
、δz
p
);
8.第四步,设姿态理论偏航、俯仰角分别为ψ、光轴指向为a、e,计算姿态角随判读误差导致的误差量δψ
p
、
[0009][0010]
第五步,根据单站姿态处理长度匹配方法,计算中轴理论投影随焦距测量误差δf导致的误差量(δyf、δzf);
[0011][0012]
第六步,计算姿态角随焦距测量误差导致的误差量δψf、
[0013][0014]
第七步,根据单站姿态处理长度匹配方法,计算中轴理论投影随特征长度测量误差δl导致的误差量(δy
l
、δz
l
);
[0015][0016]
第八步,计算姿态角随特征长度测量误差导致的误差量δψ
l
、
[0017][0018]
第九步,根据单站姿态处理长度匹配方法,计算中轴理论投影随物距测量误差δu导致的误差量(δyu、δzu);
[0019][0020]
第十步,计算姿态角随特征长度测量误差导致的误差量δψu、
[0021][0022]
第十一步:计算轴对称回转体目标单站姿态处理综合误差量δψ、
[0023][0024]
本发明的有益效果是:以直线矢量方向及长度匹配的单站姿态处理模型为基础,从直线矢量物像映射关系涉及的主要影响因子出发,由分项后综合的方式,建立了轴对称回转体单站姿态处理的精度确立模型,为实际测试前场景模拟、事后姿态处理提供比较可靠的理论依据。本发明同样能够为飞机类非轴对称回转体提供基本精度依据。
附图说明
[0025]
图1是本发明的方法流程图。
具体实施方式
[0026]
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
[0027]
本发明需要解决的技术问题是确立一种基于直线矢量方向及长度匹配的单站姿态处理精度确定方法,解决单站靶场姿态测量精度确定问题,为事前仿真及事后处理提供理论依据。本发明包括下述步骤:
[0028]
第一步:根据单站姿态处理中轴矢量物像方向及长度映射关系,确定中轴矢量理论投影(y、z)与实际投影(y
像
、z
像
)的变化量对等关系;
[0029][0030]
其中,l为中轴实际长度,f为摄像机焦距,μ为像元尺寸,u为物距;
[0031]
所有涉及坐标系以常规姿态处理算法中涉及的坐标系为基准。其中目标坐标系以目标中轴为x
t
轴,头部为正;基准坐标系以北向为x轴;摄像机坐标系以光轴指向为xc轴,平行于像面向上为yc轴;像面坐标系y、z轴分别平行于像机坐标系yc轴、zc轴。初始零姿态指目标坐标系平行于基准坐标系。
[0032]
第二步:计算直线矢量方向及像长因单位判读误差(δy
像
δz
像
)导致的最大量化误差;
[0033][0034]
第三步:由第一、二步计算出中轴理论投影随判读误差导致的误差量(δy
p
、δz
p
);
[0035]
第四步:设姿态理论偏航、俯仰角分别为ψ、光轴指向为a、e,由第三步计算出姿态角随判读误差导致的误差量δψ
p
、
[0036][0037]
第五步:根据单站姿态处理长度匹配方法,计算中轴理论投影随焦距测量误差δf导致的误差量(δyf、δzf);
[0038][0039]
第六步:计算姿态角随焦距测量误差导致的误差量δψf、
[0040][0041]
第七步:根据单站姿态处理长度匹配方法,计算中轴理论投影随特征长度测量误差δl导致的误差量(δy
l
、δz
l
);
[0042][0043]
第八步:计算姿态角随特征长度测量误差导致的误差量δψ
l
、
[0044][0045]
第九步:根据单站姿态处理长度匹配方法,计算中轴理论投影随物距测量误差δu导致的误差量(δyu、δzu);
[0046][0047]
第十步:计算姿态角随特征长度测量误差导致的误差量δψu、
[0048][0049]
第十一步:计算轴对称回转体目标单站姿态处理综合误差量δψ、
[0050][0051]
以某时刻单站姿态测量精度分析为例进行说明。飞机中轴实际长度为2.45m,理论姿态偏航角、俯仰角分别为10
°
、-80
°
,物距为2009.579m,光轴指向a、e分别为286.2662812
°
、6.836683762
°
,摄像机焦距为3000mm,单个像元大小为10μm,中轴矢量成像为(358.4557057 63.13204581),若为测量前仿真,可根据上述参数模拟出中轴矢量成像状况,按照发明内容1中所述,基于中轴矢量方向及长度匹配的单站精度确定方法包括下述步骤:
[0052]
第一步:根据单站姿态处理中轴矢量物像方向及长度映射关系,确定中轴矢量理论投影(y、z)与实际投影(y
像
、z
像
)的变化量对等关系;
[0053][0054]
其中,l/m为中轴实际长度,f/mm为摄像机焦距,μ/μm为像元尺寸,u/m为物距;
[0055]
第二步:计算直线矢量方向及像长因单位判读误差(δy
像
δz
像
)导致的最大量化误差,此处单位判读误差取1像素;
[0056][0057]
第三步:由第一、二步计算出中轴理论投影随判读误差导致的误差量(δy
p
、δz
p
)为0.000333126、0.00314935;
[0058]
第四步:设姿态理论偏航、俯仰角分别为ψ、光轴指向为a、e,由第三步计算出姿态角随判读误差导致的误差量δψ
p
、
[0059][0060]
经计算,δψ
p
、结果分别为0.43724115
°
、0.175863681
°
。
[0061]
第五步:根据单站姿态处理长度匹配方法,计算中轴理论投影随焦距测量误差δf导致的误差量(δyf、δzf),此处设焦距测量误差为10mm;
[0062]
[0063]
经计算,δyf、δzf分别为-0.002345581、-0.002345581。
[0064]
第六步:计算姿态角随焦距测量误差导致的误差量δψf、
[0065][0066]
经计算,δψf、分别为4.758388016
°
、-0.229415587
°
。
[0067]
第七步:根据单站姿态处理长度匹配方法,计算中轴理论投影随特征长度测量误差δl导致的误差量(δy
l
、δz
l
),此处设置δl为0.005m;
[0068][0069]
经计算,δy
l
、δz
l
分别为-0.00143607
°
、-0.00143607
°
。
[0070]
第八步:计算姿态角随特征长度测量误差导致的误差量δψ
l
、
[0071][0072]
经计算,δψ
l
、分别为2.913298785
°
、-0.140458523
°
。
[0073]
第九步:根据单站姿态处理长度匹配方法,计算中轴理论投影随物距测量误差δu导致的误差量(δyu、δzu),此处δu设置为3m;
[0074][0075]
经计算,δyu、δzu分别为0.00105048
°
、0.00105048
°
。
[0076]
第十步:计算姿态角随特征长度测量误差导致的误差量δψu、
[0077][0078]
经计算,δψu、分别为-2.131067427
°
、0.102744897
°
。
[0079]
第十一步:计算轴对称回转体目标单站姿态处理综合误差量δψ、
[0080][0081]
按照上述设置,最后综合精度结果δψ、为5.988505199
°
、0.337408738
°
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1