一种舰艇辐射空间声场便捷测量系统及其测量方法与流程
1.本发明属于舰艇辐射噪声测量技术领域,具体涉及一种舰艇辐射空间声场测量系统及其测量方法。
背景技术:
2.舰艇辐射声场是其隐蔽性的重要指标之一,用以评价舰艇招致敌方声纳探测和水中兵器攻击的危险性。作为声源的舰艇向外辐射噪声是具有方向特性的,即辐射噪声的能量在空间分布是不均匀的,声源级与观测点的方向有关。准确掌握舰艇辐射噪声水平指向性,对于规避敌方声纳探测和水中兵器攻击,具有非常重要的指导意义。
3.由于舰艇辐射噪声指向性测量难度较大,传统的测量方法对舰艇的机动方式要求相当高。传统的测量方法通常配备有导航基阵和测量基阵,舰艇通过导航基阵牵引,以不同的航向通过测量基阵,可以得到舰艇辐射噪声在水平面上不同方位的噪声级,即辐射噪声水平指向性。假定将水平面按30
°
的间隔划分成12个方位,则测量舰艇12个方位角的噪声级,要求舰艇通过导航基阵牵引机动12次通过测量基阵。改进方案通过改进测量系统并优化舰艇机动方式,可将舰艇机动航次减少为5次,改方案对舰艇的机动方式要求仍然高。
4.上述舰艇辐射空间声场测量方法不仅对舰艇的机动方式要求高,而且机动次数多,耗费大量的动力能源费用。
技术实现要素:
5.有鉴于此,本发明提供了一种舰艇辐射空间声场测量系统及其测量方法,采用该测量系统及测量方法,只需1个航次即可实现对舰艇在等间隔分布的12个方位角的辐射空间声场测量。
6.本发明是通过下述技术方案实现的:
7.一种舰艇辐射空间声场测量系统,包括:五个水听器组件、导航仪、数据采集仪及显控设备;
8.每个水听器组件内均设有水听器;五个水听器组件的水听器均与数据采集仪的输入端电性连接,数据采集仪的输出端与显控设备电性连接;
9.五个水听器组件成直线排布,令五个水听器组件顺序为第一水听器组件、第二水听器组件、第三水听器组件、第四水听器组件及第五水听器组件;其中,第一水听器组件与第二水听器组件、第四水听器组件与第五水听器组件之间的间距均为l,第二水听器组件与第三水听器组件、第三水听器组件与第四水听器组件之间的间距均为2l;
10.所述导航仪安装在第三水听器组件的水听器正上方,用于发射导航信号引导舰艇沿直线的主航线a航行;所述主航线a与五个水听器组件所在的直线垂直;所述主航线a上设有五个等间距布置的方位角解算点,顺序为p1、p2、p3、p4、p5;其中,p3位于第三水听器组件的正下方;相邻两个方位角解算点之间的距离为所述舰艇沿主航线a依次通过方位角解算点p1、p2、p3、p4、p5时,五个方位角解算点能够覆盖舰艇等间隔划分的12个方位角;五个水
听器分别用于测量舰艇发出辐射噪声的声信号,并将所述声信号转换成电信号;所述数据采集仪采集到五个水听器的电信号后,将所述电信号转发给显控设备,所述显控设备对所述电信号进行解算,将所述电信号的辐射噪声的声压级折算至1米处,以极坐标的形式表示出来,即可得到舰艇的辐射空间声场示意图,完成舰艇在12个方向的空间声场测量。
11.进一步的,所述测量系统还包括测距仪;所述测距仪安装在第三水听器组件的水听器正下方,用于记录其本身与所述舰艇的距离信息,并将所述距离信息发送给数据采集仪。
12.进一步的,所述测量系统还包括测量船;所述数据采集仪和显控设备均安装在所述测量船上。
13.进一步的,所述水听器组件还包括:配重、缆绳及浮球;所述浮球、水听器和配重通过缆绳从上到下顺序串联,且所述缆绳处于竖直状态。
14.进一步的,l的取值范围为10米~20米。
15.进一步的,所述主航线a位于第三水听器组件的水听器正下方5米~10米。
16.进一步的,令第一水听器组件的水听器为水听器一;第二水听器组件的水听器为水听器二;第三水听器组件的水听器为水听器三;第四水听器组件的水听器为水听器四;第五水听器组件的水听器为水听器五;
17.则方位角解算点p1覆盖0
°
和
±
30
°
共3个方位角,即舰艇在方位角解算点p1时,所述舰艇与水听器三的夹角为0
°
,舰艇与水听器二的夹角为30
°
,舰艇与水听器四的夹角为
‑
30
°
;
18.方位角解算点p2覆盖
±
60
°
共2个方位角,即舰艇在方位角解算点p2时,舰艇与水听器一的夹角为60
°
,舰艇与水听器四的夹角为
‑
60
°
;
19.方位角解算点p3覆盖
±
90
°
共2个方位角,即舰艇在方位角解算点p3时,舰艇与水听器一的夹角为90
°
,舰艇与水听器四的夹角为
‑
90
°
;
20.方位角解算点p4覆盖
±
120
°
共2个方位角,即舰艇在方位角解算点p4时,舰艇与水听器一的夹角为120
°
,舰艇与水听器四的夹角为
‑
120
°
;
21.方位角解算点p5覆盖
±
150
°
和180
°
共3个方位角,即舰艇在方位角解算点p5时,舰艇与水听器二的夹角为150
°
,舰艇与水听器四的夹角为
‑
150
°
;所述舰艇与水听器三的夹角为180
°
。
22.一种舰艇辐射空间声场测量系统的测量方法,具体步骤如下:
23.步骤一,舰艇机动至主航线a的设定位置后,开启导航仪,舰艇在导航信号的引导下,沿主航线a保持直线航行通过导航仪下方,同时开启数据采集仪;
24.步骤二,在舰艇沿主航线a的运动过程中,五个水听器测量得到舰艇通过方位角解算点p1、p2、p3、p4、p5时的辐射噪声的声信号;
25.步骤三,通过显控设备计算舰艇与五个水听器在上述五个方位角解算点对应的12个方位角下的辐射噪声级,并折算至1米处,以极坐标的形式显示出来,得到舰艇空间声场指向性图。
26.进一步的,所述测量系统还包括测距仪;测距仪实时记录舰艇与测距仪的距离;
27.由于舰艇沿主航线a运动的过程中,会发生偏移,舰艇的实际航行轨迹为主航线a’,因此,采用主航线a’替换主航线a;根据数据采集仪采集到的测距仪的实时数据、水听器
的深度及舰艇本身发出的深度和航速信息,在显控设备上可计算得到舰艇的主航线a’;在主航线a’上重新标记方位角解算点p1、方位角解算点p2、方位角解算点p3、方位角解算点p4及方位角解算点p5。
28.进一步的,在步骤一之前,布放和安装调试所述测量系统。
29.有益效果:
30.(1)本发明在舰艇辐射空间声场测量过程中,对舰艇的机动方式要求低,舰艇只需沿直线匀速机动1次,即可完成舰艇12个方向的辐射空间声场测试,相比现有的测试系统和方法,可以显著提高测量效率、大幅降低舰艇动力能耗。
31.(2)本发明主要适用于舰艇辐射声场空间指向性的测量与评估,可以为舰艇声隐身技术发展提供科学依据。
附图说明
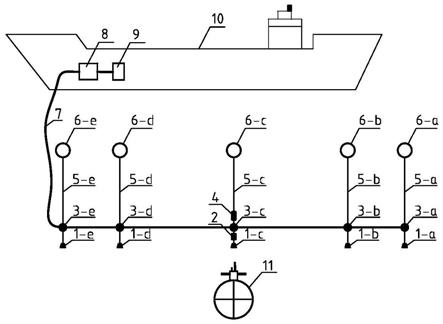
32.图1为本发明的系统组成示意图;
33.图2为本发明的舰艇机动的主航线及方位角解算点的分布示意图;
34.图3为采用本发明的系统测量得到的舰艇空间声场指向性示意图;
35.其中,1
‑
a
‑
配重一、1
‑
b
‑
配重二、1
‑
c
‑
配重三、1
‑
d
‑
配重四、1
‑
e
‑
配重五、2
‑
测距仪、3
‑
a
‑
水听器一、3
‑
b
‑
水听器二、3
‑
c
‑
水听器三、3
‑
d
‑
水听器四、3
‑
e
‑
水听器五、4
‑
导航仪、5
‑
a
‑
缆绳一、5
‑
b
‑
缆绳二、5
‑
c
‑
缆绳三、5
‑
d
‑
缆绳四、5
‑
e
‑
缆绳五、6
‑
a
‑
浮球一、6
‑
b
‑
浮球二、6
‑
c
‑
浮球三、6
‑
d
‑
浮球四、6
‑
e
‑
浮球五、7
‑
电缆、8
‑
数据采集仪、9
‑
显控设备、10
‑
测量船、11舰艇。
具体实施方式
36.下面结合附图并举实施例,对本发明进行详细描述。
37.本实施例提供了一种舰艇辐射空间声场测量系统,参见附图1,包括:五个水听器组件、测距仪2、导航仪4、电缆7、数据采集仪8、显控设备9及测量船10;
38.每个所述水听器组件均包括:配重、水听器、缆绳及浮球;所述浮球、水听器和配重通过缆绳从上到下顺序串联;所述配重用于保证缆绳处于竖直状态;五个水听器组件的水听器均通过电缆7与数据采集仪8的输入端电性连接,数据采集仪8的输出端通过电缆7与显控设备9电性连接;所述数据采集仪8和显控设备9均安装在所述测量船10上;所述数据采集仪8用于采集水听器的测量得到的水声信号,所述显控设备9用于对数据采集仪8采集的水声信号进行处理、分析和显示;
39.五个水听器组件在水流的作用下,沿直线展开,成直线排布,令五个水听器组件顺序为第一水听器组件、第二水听器组件、第三水听器组件、第四水听器组件及第五水听器组件;第一水听器组件的配重、水听器、缆绳及浮球分别为配重一1
‑
a、水听器一3
‑
a、缆绳一5
‑
a及浮球一6
‑
a;第二水听器组件的配重、水听器、缆绳及浮球分别为配重二1
‑
b、水听器二3
‑
b、缆绳二5
‑
b及浮球二6
‑
b;第三水听器组件的配重、水听器、缆绳及浮球分别为配重三1
‑
c、水听器三3
‑
c、缆绳三5
‑
c及浮球三6
‑
c;第四水听器组件的配重、水听器、缆绳及浮球分别为配重四1
‑
d、水听器四3
‑
d、缆绳四5
‑
d及浮球四6
‑
d;第五水听器组件的配重、水听器、缆绳及浮球分别为配重五1
‑
e、水听器五3
‑
e、缆绳五5
‑
e及浮球五6
‑
e;其中,水听器一3
‑
a与水听器
二3
‑
b、水听器四3
‑
d与水听器五3
‑
e之间的间距均为l,水听器二3
‑
b与水听器三3
‑
c、水听器三3
‑
c与水听器四3
‑
d之间的间距均为2l,l的取值范围为10米~20米;
40.所述测距仪2和导航仪4均安装在缆绳三5
‑
c上,所述测距仪2位于配重三1
‑
c和水听器三3
‑
c之间,所述导航仪4位于水听器三3
‑
c和浮球三6
‑
c之间,且保证测距仪2和导航仪4离水面的深度一定;
41.其中,所述配重三1
‑
c、测距仪2、导航仪4、缆绳三5
‑
c和浮球三6
‑
c组成导航测距单元,用于引导舰艇11沿机动轨迹通过五个水听器组件的正下方;所述导航仪4用于发射导航信号引导舰艇11向单一方向航行,所述测距仪2用于记录其本身与所述舰艇11的距离信息,并将所述距离信息发送给数据采集仪8;
42.所述机动轨迹为位于水听器三3
‑
c正下方5米~10米的直线的主航线a;参见附图2,所述主航线a与五个水听器组件所在的直线垂直;所述主航线a上设有五个等间距布置的方位角解算点,顺序为p1、p2、p3、p4、p5;所述舰艇11在导航仪4的引导下沿主航线a依次通过方位角解算点p1、p2、p3、p4、p5;其中,p3位于水听器三3
‑
c的正下方,即位于缆绳三5
‑
c所在直线上;相邻两个方位角解算点之间的距离为
43.方位角解算点p1覆盖0
°
和
±
30
°
共3个方位角,即舰艇11在方位角解算点p1时,忽略舰艇11与五个水听器组件的水听器在深度上的高度差,所述舰艇11与水听器三3
‑
c的夹角为0
°
,舰艇11与水听器二3
‑
b的夹角为30
°
,舰艇11与水听器四3
‑
d的夹角为
‑
30
°
;
44.方位角解算点p2覆盖
±
60
°
共2个方位角,即舰艇11在方位角解算点p2时,忽略舰艇11与五个水听器组件的水听器在深度上的高度差,舰艇11与水听器一3
‑
a的夹角为60
°
,舰艇11与水听器四3
‑
e的夹角为
‑
60
°
;
45.方位角解算点p3覆盖
±
90
°
共2个方位角,即舰艇11在方位角解算点p3时,忽略舰艇11与五个水听器组件的水听器在深度上的高度差,舰艇11与水听器一3
‑
a的夹角为90
°
,舰艇11与水听器四3
‑
e的夹角为
‑
90
°
;
46.方位角解算点p4覆盖
±
120
°
共2个方位角,即舰艇11在方位角解算点p4时,忽略舰艇11与五个水听器组件的水听器在深度上的高度差,舰艇11与水听器一3
‑
a的夹角为120
°
,舰艇11与水听器四3
‑
e的夹角为
‑
120
°
;
47.方位角解算点p5覆盖
±
150
°
和180
°
共3个方位角,即舰艇11在方位角解算点p5时,忽略舰艇11与五个水听器组件的水听器在深度上的高度差,舰艇11与水听器二3
‑
b的夹角为150
°
,舰艇11与水听器四3
‑
d的夹角为
‑
150
°
;所述舰艇11与水听器三3
‑
c的夹角为180
°
;
48.五个方位角解算点能够覆盖舰艇11等间隔划分的12个方位角;所述舰艇11会发出辐射噪声;五个水听器分别用于测量舰艇11位于12个方位角的辐射噪声的声信号,并将所述声信号转换成电信号;所述数据采集仪8采集到五个水听器的电信号后,将所述电信号转发给显控设备9,所述显控设备9对所述电信号进行解算,将所述电信号的辐射噪声的声压级折算至1米处,以极坐标的形式表示出来,即可得到舰艇11的辐射空间声场示意图,并显示出来,如图3所示。
49.基于上述一种舰艇辐射空间声场测量系统的测量方法,具体步骤如下:
50.步骤一,布放和安装调试所述测量系统,将所述测量系统安装完成后,对所述测试系统进行联调;
51.步骤二,舰艇11机动至主航线a的方位角解算点p1外侧(即远离方位角解算点p2的
一侧),并下潜至指定深度,为了防止碰撞,舰艇11的航行深度大于水听器组件的配重深度;
52.步骤三,开启导航仪4和测距仪2,舰艇11在导航信号的引导下,向导航仪4所在方向行驶,测距仪2实时记录舰艇11与测距仪2的距离;
53.步骤四,舰艇11航行至距测距仪2指定距离处时,关闭导航仪4,舰艇11沿主航线a保持直线航行通过导航仪4下方,同时开启数据采集仪8,记录舰艇11通过主航线a时的辐射噪声的声压级;待舰艇11航行至指定距离后,关闭数据采集仪8;
54.其中,由于舰艇11沿主航线a运动的过程中,可能会发生微小偏移,舰艇11的实际航行轨迹为主航线a’,因此,采用主航线a’替换主航线a,且;根据数据采集仪8采集到的测距仪2的实时数据、水听器的深度及舰艇11本身发出的深度和航速信息,在显控设备9上可计算得到舰艇11的主航线a’;
55.步骤五,在主航线a’上重新标记方位角解算点p1、方位角解算点p2、方位角解算点p3、方位角解算点p4及方位角解算点p5;舰艇11只需1个航次,即可覆盖12个方向的空间声场,具体如下:
56.通过五个水听器测量得到舰艇11通过方位角解算点p1、p2、p3、p4、p5时的辐射噪声的声信号;舰艇11通过方位角解算点p1时,由水听器三3
‑
c、水听器二3
‑
b、水听器四3
‑
d的测试数据解算得到0
°
、30
°
、
‑
30
°
方位的辐射声场;舰艇11通过方位角解算点p2时,由水听器一3
‑
a、水听器五3
‑
e的测试数据解算得到60
°
、
‑
60
°
方位的辐射声场;舰艇11通过方位角解算点p3时,由水听器一3
‑
a、水听器五3
‑
e的测试数据解算得到90
°
、
‑
90
°
方位的辐射声场;舰艇11通过方位角解算点p4时,由水听器一3
‑
a、水听器五3
‑
e的测试数据解算得到120
°
、
‑
120
°
方位的辐射声场;舰艇11通过方位角解算点p5时,由水听器三3
‑
c、水听器二3
‑
b、水听器四3
‑
d的测试数据解算得到180
°
、150
°
、
‑
150
°
方位的辐射声场;
57.步骤六,通过显控设备9计算舰艇11与五个水听器在上述五个方位角解算点对应的12个方位角下的辐射噪声级,并折算至1米处,以极坐标的形式显示出来,即可得到如图3所示的舰艇空间声场指向性图。
58.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1