一种基于光阱刚度标定的液体粘滞度测量装置及其方法
一种基于光阱刚度标定的液体粘滞度测量装置及其方法
(一)技术领域
1.本发明涉及的是一种基于光阱刚度标定的液体粘滞度测量装置及其方法,可用于光镊系统光阱刚度的标定与校准及液体粘滞度的测量,属于光学操控领域。
(二)
背景技术:
2.近些年来由于微循环系统的生物医学研究和微流控生物芯片的发展,探索生物流体的功能特性已成为一个重要的研究课题。其中,生物流体的粘滞特性测量受到广泛的关注。在微观生物环境中,粘度参与了许多生化反应过程。就蛋白质而言,在其合成过程中有一系列的结构变化,根据kramers的理论,液体环境的粘滞度会影响蛋白质的结构改变能力,与蛋白质相关的化学反应速率受到改变,影响其生成形式。液体环境的粘滞度也直接影响生物分子的运动、细胞的基因表达、局部运动和分化。
3.由于传统的机械粘滞度检测方法,除了要求较高的样本数量外,传统方法只适用于均匀流,缺乏对非均匀流体的空间分辨能力;因此,研究液体粘滞度特性的各种新方法与技术也在不断发展。目前在微观尺度下研究液体粘滞度特性的技术主要利用光漂白后的荧光恢复、放射荧光的非各向同性检测、分子生物学转子的荧光强度、扫描光镊的相位延迟和动态频谱测量。前三种技术都需要添加荧光材料,这可能导致生物流本身特性的改变。扫描光镊的相位延迟和动态频谱测量方法成为替代传统的机械粘滞度检测的优质方法。
4.光镊技术发展迅速,从开始的对简单微粒操作到对细胞粒子皮牛量级的基准测量,光镊已经成为物理、化学和生物等重要领域不可或缺的操控与测量手段。扫描光镊的动态频谱测量方法和相位延迟法对光阱刚度标定与液体粘滞度分析,主要使用四象限探测器探测并记录微珠运动的时间和位置信息。动态频谱测量方法主要记录微珠受光镊梯度力作用下做布朗运动时的位置信息,可以快速地计算出光镊系统的光阱刚度。中国科学院西安光学精密机械研究所,采用四象限探测器和功率谱密度法,搭建了一套快速标定光镊三维光阱刚度的测量系统,并于光子学报发表相关论文。合肥微尺度物质科学国家实验室在发表文章《四种光阱刚度测量法的实验研究与比较》中详细介绍了扫描光镊的相位延迟方法来测量液体的粘滞度系数。扫描光镊的相位延迟方法主要记录微珠在受周期信号光镊光阱作用力下微珠运动的相位延迟,通过此方法计算出流体的粘滞度系数。在光阱刚度标定与液体粘滞度分析过程中,依靠三维压电位移平台实现光镊的焦点偏移,对位移平台的精度要求较高,特别是纳米级压电位移平台造价昂贵。相对于微珠移动测量带来的惯性等众多因素影响不容忽视;四象限探测器测量精度有限,对散射光检测能力较弱,导致标定光阱刚度与测量液体粘滞度具有较大误差。
5.本发明公开了一种基于光阱刚度标定的液体粘滞度测量装置及其方法,利用动态频谱测量和扫描微珠相位延迟的方法标定光阱刚度和分析液体粘滞度,降低光阱刚度校准的误差,提高液体粘滞度的测量精度。本发明利用单光束光阱捕获在已知粘滞度溶液中的微珠,使用四象限探测器收集前向散射的探测光信号,分析微珠的热运动,校准光阱刚度;将已知粘滞度的溶液更换成待测溶液,控制扫描振镜使捕获光做简谐振动,被捕获的微珠
做受迫振动,四象限探测器收集前向散射的探测光信号,测量小球受迫振动对捕获光简谐振动的相位滞后,计算获得待测液体的粘滞度。收集探测光的前向散射信号,可降低光阱刚度校准的误差;利用扫描振镜配合显微物镜操控微珠,使微珠具有二维高分辨率的位移;在四象限探测器前放置显微物镜使探测信号的前向散射光均匀照射到四象限探测器的表面,提高探测器的检测效率;利用小球受迫振动对于光阱简谐振动的相位滞后测量液体的粘滞度,从而提高液体粘滞度的测量精度。
(三)
技术实现要素:
6.本发明的目的在于提供一种结构简单紧凑、操作调节容易、高精度等优点基于光阱刚度标定的液体粘滞度测量装置及其方法。
7.本发明的目的是这样实现的:
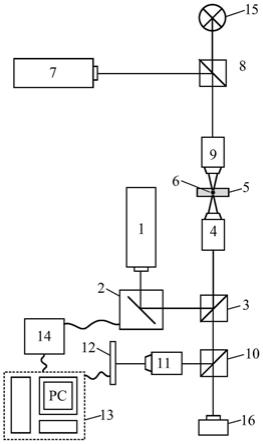
8.一种基于光阱刚度标定的液体粘滞度测量装置及其方法。其特征是:所述系统由激光光操控功能模块和光束定位功能模块两部分组成。所述系统主要由激光光源1和7,扫描振镜2,双色镜3、8和10,显微物镜4、9和11;培养皿5,微珠6,四象限探测器12,pc电脑端13,扫描振镜控制器14,光源15和ccd相机16组成。所述系统中,激光光源1输出的激光光束作为操控光经扫描振镜2和双色镜3反射进入显微物镜4产生聚焦光阱,捕获悬浮于培养皿5已知溶液中的微珠6。激光光源7输出的激光光束作为探测光经双色镜8反射进入显微物镜9照射微珠6,由显微物镜4收集前向探测信号,再通过双色镜3由双色镜10反射进入显微物镜11投射在四象限探测器12上,投射光斑居四象限探测器12中央,光斑大小约占探测区域总面积的一半左右。由四象限探测器12测得四相模拟电压信号通过pc电脑端13计算获得微珠6的动态位置信息。培养皿中的已知溶液更换成待测溶液,由pc电脑端13向扫描振镜控制器14发送控制信号控制扫描振镜2使操控光做简谐振动,被捕获的微珠6做同频率的受迫振动。四象限探测器12测量微珠6的周期运动信号,pc电脑端分析微珠运动信号相对于操控光的相位滞后,计算得到液体的粘滞系数。
9.由操控光产生聚焦光阱将悬浮于培养皿5溶液中的微珠6捕获,微珠6受热运动影响发生布朗运动现象,由四象限探测器12采集信息。粒子布朗运动的功率谱密度表达式:式中k
b
为波尔兹曼常量,t为溶液温度,γ0为微珠在去离子水溶液中的阻力系数,f为振动频率,f
c
为拐角频率。微珠在去离子水溶液中的阻力系数由γ0=6πρη0r得出,ρ为液体密度,η0为已知溶液粘滞度,r为微珠6半径。根据光阱刚度与阻力系数的关系κ=2πγ0f
c
,可以测量出光阱在已知液体下的光阱刚度κ。
10.操控光产生聚焦光阱捕获微珠6,控制扫描振镜2沿箭头方向以频率f
k
作偏转使操控光做简谐振动,实现微珠6以频率f
k
在显微物镜4焦平面上的受迫振动。通过测量周期运动的微珠6对于操控光相位的滞后,可以获得液体的粘滞系数:其中δ表示微珠6对于操控光的相位差,r表示微珠6半径。
11.所述系统中物镜4和9具有相同的且不小于40倍的放大倍数。在已知粘滞度溶液和
待测粘滞度溶液的光操控过程中,使用相同尺寸微米量级的微珠6。
(四)附图说明
12.图1是一种基于光阱刚度标定的液体粘滞度测量装置的系统示意图。
13.图2是扫描振镜上的反射镜沿箭头方向偏转使操控光简谐振动的结构示意图。
14.图3是前向散射光斑经显微物镜收集至四象限探测器的侧向示意图。
(五)具体实施方式
15.下面结合具体的实施例来进一步阐述本发明。
16.一种基于光阱刚度标定的液体粘滞度测量装置及其方法。中心波长为1064nm的激光光源1输出的激光光束作为操控光经扫描振镜2和双色镜3反射进入40x/na0.85显微物镜4在其焦平面处产生聚焦光阱,捕获悬浮于培养皿5去离子水中直径为2微米的二氧化硅微珠6。中心波长为980nm的激光光源7输出的激光光束作为探测光经双色镜8反射进入40x/na0.85显微物镜9照射直径为2微米的微珠6,由显微物镜4收集前向探测信号,再通过双色镜3由双色镜10反射进入40x/na0.5显微物镜11投射在四象限探测器12上。由四象限探测器12测得四相模拟电压信号通过pc电脑端13计算获得微珠6的位置信息。
17.系统中,功率为500mw中心波长为1064nm的激光光源1输出的激光光束作为操控光经扫描振镜2和双色镜3反射进入显微物镜4在其焦平面处产生聚焦光阱,捕获悬浮于培养皿5中30%葡萄糖溶液中直径为2微米的微珠6。由pc电脑端13向扫描振镜控制器14发送控制信号控制扫描振镜2沿箭头方向转动,使操控光以频率f
k
=100hz和振幅a1=20μm做简谐振动l1=a1sin(2πf
k
t),使光阱捕获的微珠6以相同频率做受迫振动l2=a2sin(2πf
k
t+δ)。
18.系统中,功率为50mw中心波长为980nm的激光光源7输出的激光光束作为探测光经双色镜8反射进入显微物镜9照射微珠6,由显微物镜4收集前向探测信号,再通过双色镜3由双色镜10反射进入显微物镜11投射在四象限探测器12上,调整显微物镜11与四象限探测器12的距离,投射光斑的面积占四象限探测器12的一半左右。其中,四象限探测器12与显微物镜11焦平面的距离r1需大于显微物镜11焦距f1,使收集的探测信号均匀分布在四象限探测器探测面上。由四象限探测器12测得四相模拟电压信号通过pc电脑端13计算获得微珠6的位置随时间变化的信息。
19.系统中,光阱刚度标定是通过四象限探测器12记录水中微珠6在光镊捕获力的作用下布朗运动的时域信号谱,通过傅里叶变换得到公式(1)中功率谱密度的拐角频率f
c
,根据水的阻力系数γ0计算得到光阱刚度值κ。在培养皿5中更成换待测溶液,由pc电脑端13向扫描振镜控制器14发送控制信号控制扫描振镜2使操控光做简谐振动,控制微珠6受迫振动,pc电脑端分析微珠相对操控光的滞后相位δ,根据公式(2)得到液体的粘滞系数η。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1