一种基于ROV的海底浅层地形形变监测装置
一种基于rov的海底浅层地形形变监测装置
技术领域
1.本发明涉及水下地形测量技术领域,具体涉及一种基于rov的海底浅层地形形变监测装置。
背景技术:
2.天然气水合物作为未来潜在能源,具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源。水下地形监测为各种海洋活动提供基础地理信息,既服务于水域交通运输、港口建设、海上钻井等海洋工程,还为地球形状研究、海底构造和空间特征提供基础性信息。随着海洋事业的不断发展和水下工程研究的不断深入,水下地形及变形监测是水下工程及应用的基础,其重要性日益凸显。
3.虽然陆地上的地形监测技术发展较为成熟,观测系统研制较为完善,但对水下工程曲面形态监测技术及水下地形多点精确监测技术的研究基础较为薄弱。目前的技术多是基于多波束、侧扫声呐、视频或潜标等探测技术,其监测精度有限或无法进行长期可持续监测。因此急需开展多点、精确、原位长期监测原理与技术研究,进行水下海底浅层地形形变监测。
技术实现要素:
4.本发明要解决的技术问题是,克服现有技术中的不足,提供一种基于rov的海底浅层地形形变监测装置,用于实现海底浅层地形的形变监测。
5.为解决技术问题,本发明的解决方案是:
6.提供一种基于rov的海底浅层地形形变监测装置,包括:以阵列式布置的多个传感器单元,各传感器单元通过连接杆以柔性连接方式依次串接;电子舱,内设电池和控制采集电路板,分别通过线缆与各传感器单元相连;锥形钻头,与串接的传感器单元相连且位于最前端;套管,前端为开口状,内腔用于安放所述传感器单元和电子舱,尾端设有把手;锥形钻头的底面与套管前端开口相接,并能由束缚结构实现锥形钻头在套管前端的固定与解锁。
7.作为本发明的优选方案,所述传感器单元的两端固定安装连接杆,相邻连接杆之间通过万向节实现柔性连接。
8.作为本发明的优选方案,最前侧的一个传感器单元以其端部直接固定在锥形钻头的底面上,另一端固定安装连接杆,且通过万向节与相邻传感器单元的连接杆实现柔性连接。
9.作为本发明的优选方案,所述连接杆是柔性可形变材料的连接杆;所述套管是不锈钢材质的套管。
10.作为本发明的优选方案,所述电子舱和传感器单元分别设有耐压水密外壳,所述线缆通过设于耐压水密外壳上的水密接头实现连接。
11.作为本发明的优选方案,所述控制采集电路板上设有本地数据存储模块,或者设有数据传输接口。
12.作为本发明的优选方案,所述套管的后端为开口状,把手固定在开口边缘处;或者后端设端盖,把手固定在端盖上。
13.作为本发明的优选方案,所述传感器单元包括传感器舱,在其中心位置设置mems传感器模块。
14.作为本发明的优选方案,所述束缚结构是两根钢丝绳,钢丝绳的一端固定在锥形钻头上,另一端穿过套管内腔后从后端开口或端盖开孔引出;或者,所述束缚结构是卡扣结构,用于解锁的杠杆或钢丝绳贯穿设于套管的内腔中,其一端与卡扣结构相接,另一端设于套管后端。
15.作为本发明的优选方案,所述锥形钻头上沿中心轴对称设有两个通孔,所述钢丝绳的末端固定设有带螺纹的安装杆;安装杆穿过通孔,并以螺母实现固定安装;或者,所述卡扣结构包括相互配合的两部分,分别设于锥形钻头底面和套管内壁上。
16.与现有技术相比,本发明的有益效果是:
17.1、本装置基于套管的保护,能将原本柔性的监测装置完全深入至指定位置的海底浅地层。在以rov回收套管后,以阵列式布置的传感器单元能够对海底浅层地形进行原位姿态位移变形监测,为各种海洋活动提供基础地理信息。
18.2、采用被传感器舱包裹保护的mems传感器模块组成的多个传感器单元,在安装固定至指定海底浅地层位置后,mems传感器模块获取得初始角度位置数据,当装置所在位置的海底浅地层产生位移形变时,mems传感器模块也随之产生位移角度变化,进而将自身的位移变化通过采集电路板采集并存储数据,实现原位、长期、精确的角度、位移变化记录。
19.3、本装置整体结构简单,无须额外钻进电机等设备,能在很大程度上降低成本。
20.4、本发明采用基于rov的机械操作,方便携带与布放,简单便捷操作成本低,具有较强的科研效益和经济效益,可为海底浅层地形的研究和资源开发提供有效的地理信息。
附图说明
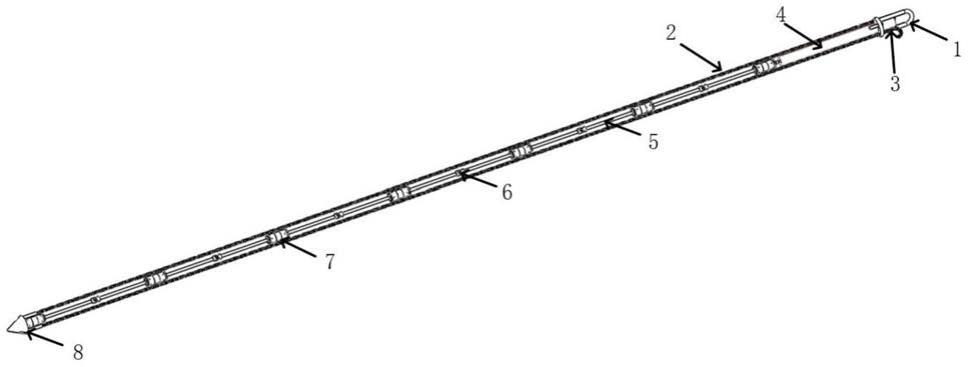
21.图1是基于rov的海底浅层地形形变监测装置的整体结构示意图。
22.图2是监测装置上端的局部结构示意图。
23.图3是监测装置下端的局部结构示意图。
24.图4是传感器单元连接的结构示意图。
25.图5是电子舱的结构示意图。
26.图6是传感器单元的结构示意图。
27.图中附图标记:1把手;2不锈钢套管;3钢丝绳;4电子舱;4-1电池;4-2控制采集电路板;5连接杆;6万向节;7传感器单元;7-1传感器舱;7-2mems传感器模块;8锥形钻头。
具体实施方式
28.下面结合附图和实施方式进一步说明本发明的技术方案。以下的实施例可以使本专业技术领域的技术人员更全面的了解本发明,但不以任何方式限制本发明。
29.本技术中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
30.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
31.如图所示,本发明所述基于rov的海底浅层地形形变监测装置,包括:以阵列式布置的多个传感器单元7,各传感器单元7通过连接杆5以柔性连接方式依次串接;传感器单元7包括传感器舱7-1,在其中心位置设置mems传感器模块7-2。mems传感器模块是利用mems技术生产制造的传感器,属于成熟的市售商品。mems全称为微机电系统(micro-electro-mechanical systems),是将微电子电路技术与微机械系统融合到一起的工业技术,其操作范围在微米尺度内。电子舱4内设电池4-1和控制采集电路板4-2,分别通过线缆与各传感器单元7相连;电池5-1用于给传感器单元7供电,控制采集电路板4-2用于实时采集传感器单元7产生的角度位移变化的数据信息。可选在控制采集电路板上4-2设有本地数据存储模块,或者进一步设有数据传输接口。
32.锥形钻头8与串接的传感器单元7相连且位于最前端;套管2的前端为开口状,内腔用于安放所述传感器单元7和电子舱4,尾端设有把手1;锥形钻头8的底面与套管2前端开口相接,并能由束缚结构实现锥形钻头在套管前端的固定与解锁。
33.如图1所示,在阵列式布置的传感器单元7中,最前侧的一个传感器单元6以其端部直接固定在锥形钻头8的底面上,另一端固定安装连接杆5,且通过万向节6与相邻传感器单元7的连接杆5实现柔性连接。其它传感器单元7的两端固定安装连接杆5,相邻连接杆5之间通过万向节6实现柔性连接。最后侧的一个传感器单元6直接固定连接至电子舱4。
34.为适应海底水深和压力,电子舱4和传感器舱7-1分别设有耐压水密外壳,所述线缆通过设于耐压水密外壳上的水密接头实现连接。考虑到海底浅层地形形变监测的需求,连接杆5也采用柔性可形变材料。在与万向节6的配合使用后,各传感器单元7中的mems传感器模块7-2能够最大限度地跟随海底浅层地形变化而产生角度位移变化,并通过控制采集电路板4-2实时采集指定海底地层位置的姿态位移变化,进而长期监测海底浅层地形的形变。
35.锥形钻头8与套管2之间为可拆卸的安装方式,仅在将传感器阵列插入海底时进行组装;完成插入后,需拔出套管2以使传感器阵列与地层紧密接触。因此,需要设置可解锁的束缚结构。如本发明各图中的示例,束缚结构是两根钢丝绳3,末端固定设有带螺纹的安装杆;锥形钻头8上沿中心轴对称设有两个通孔,安装杆穿过通孔并以螺母实现固定安装;钢丝绳3的另一端穿过套管2的内腔后从后端开口或端盖开孔引出。由rov的机械手拉紧钢丝绳3的端部,即可使锥形钻头8紧贴在套管2前端。束缚结构也可选采用卡扣结构,卡扣结构包括相互配合的两部分,分别设于锥形钻头底面和套管内壁上;用于解锁的杠杆或钢丝绳贯穿设于套管的内腔中,其一端与卡扣结构相接,另一端设于套管后端。
36.套管2是不锈钢材质,为适应回收需求,其前端为开口状。如图2所示,套管2的后端可选为开口状,把手1固定在开口边缘处;或者在套管2的后端设端盖,端盖设开孔用于穿过钢丝绳或杠杆部件,把手1固定在端盖上。套管2套在内部设备外面,用于保护内部设备,避免在插入浅地层过程受到内部损坏。把手1与套管2固定为一体,便于rov上机械手的抓取。
37.本发明的使用方法说明:
38.1、在船上完成装置的组装,将拉手1固定(或锁定)在rov的机械臂(或固定支架)上;然后以机械手拉紧钢丝绳3(或事先锁紧卡扣结构),使锥形钻头8紧贴套管2前端。
39.2、使装置跟随rov下潜至海底,由机械臂(或固定支架)将装置竖向插入至指定位置的海底地层。在插入过程中,由于锥形钻头8封堵住套管2的前端开口,地层淤泥或砂石不会进入套管2中对电子舱4或传感器单元7中的电子设备造成损伤。
40.3、装置插入到位后,控制rov的机械手放开钢丝绳3(或解锁卡扣结构),带动把手1向上使套管2抽离地层并回收。此时,锥形钻头8和与之相连的以阵列式布置的多个传感器单元7将留在地层中,并在随后用于实时、长期地对海底地层的地形变化进行监测与记录。根据电池4-1的使用年限,可以一次性回收电子舱4以获取已存储的监测数据;也可以通过rov定期下潜,从数据传输接口获取已存储数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1