一种固体火箭发动机Ⅱ界面脱粘的成像检测方法及系统与流程
一种固体火箭发动机ⅱ界面脱粘的成像检测方法及系统
技术领域
1.本发明涉及超声无损检测领域,特别是涉及一种固体火箭发动机ⅱ界面脱粘的成像检测方法及系统。
背景技术:
2.固体火箭发动机燃烧室一般由钢壳体/绝热层/衬层/推进剂粘接而成,由于衬层的厚度很薄,且其声学特性与推进剂类似,因此可将衬层与推进剂视为一体考虑。其中,主要检测界面为壳体与绝热层之间的界面(被称为ⅰ界面),以及绝热层和推进剂之间的界面(被称为ⅱ界面)。生产过程中,ⅱ界面脱粘是较为常见的一类缺陷。发动机界面脱粘会导致推进剂燃烧面不确定性增加,偏离预先设计的燃面变化规律,影响导弹武器性能,甚至引发灾难事故,直接威胁发射安全。
3.当前,对于固体火箭发动机ⅱ界面脱粘缺陷的检测方法主要有射线检测、声发射检测以及超声检测等。采用射线技术能够较准确检出多层粘接结构中的脱粘缺陷,但检测速度慢,检测效率低且成本较高,无法做到全覆盖检测。声发射检测需要在脱粘间隙达到一定程度时才可以有效检测,且严重依赖于检测人员的经验,检测效果难以得到有效保障;此外,这种方法的检测分辨率也较低。
4.超声检测方法用于火箭发动机ⅱ界面脱粘缺陷检测时,检测方式主要有单通道超声垂直入射或采用超声导波检测等。由于固体火箭发动机多层粘接结构的声学特性,壳体与绝热层之间具有较高的声阻抗差,能够接收到的ⅱ界面超声回波信号微弱,信噪比较低,且采用单通道超声检测的效率低,检测时间过长。
5.因此,亟需一种固体火箭发动机ⅱ界面脱粘的成像检测方法或系统,以提高固体火箭发动机ⅱ界面脱粘检测的效率。
技术实现要素:
6.本发明的目的是提供一种固体火箭发动机ⅱ界面脱粘的成像检测方法及系统,能够提高固体火箭发动机ⅱ界面脱粘检测的效率。
7.为实现上述目的,本发明提供了如下方案:
8.一种固体火箭发动机ⅱ界面脱粘的成像检测方法,包括:
9.利用阵列超声换能器对耦合平楔块的固体火箭发动机壳体进行阵列超声检测;所述阵列超声换能器在带编码器的扫查检测工装下夹持;所述平楔块贴合在固体火箭发动机壳体表面;所述固体火箭发动机壳体设在扫查检测工装下;所述阵列超声换能器与阵列超声板卡连接;所述阵列超声板卡用于控制阵列超声换能器进行声波的激励和接收;所述编码器与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声换能器的位置坐标反馈;计算机与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声板卡控制和信号采集;
10.根据固体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定
阵列超声换能器的阵元中心频率;所述固体火箭发动机包括:平楔块层、壳体层、绝热层以及推进剂层;所述介质的参数包括:介质的厚度、声速以及衰减系数;
11.确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器;所述最优阵元间距为具有最佳声场指向性时的阵元间距;
12.根据斯涅尔定律确定所设计的阵列超声换能器的阵列超声声束在多层介质中的声束聚焦路径;进而计算在ⅱ界面进行聚焦时,阵列超声换能器发射和接收声波的延时法则,以此控制阵列超声换能器的超声信号的延迟激励时间,从而使各个阵元激发的子声波通过相位干涉聚焦到ⅱ界面上;
13.基于延时法则,采用预埋ⅱ界面脱粘缺陷的超声检测标准试样进行有无缺陷的对比试验,确定脱粘缺陷的成像闸门;
14.超声板卡采集整个扫查区域的所有的超声回波a型数据,并保存在检测系统中;
15.利用超声回波信号和编码器提供的位置信号以及成像闸门,将各个位置点对应的超声信号在成像闸门内最大的信号幅值转化为像素点,进而根据整个检测区域的像素点组成ⅱ界面的超声c型图像。
16.可选地,所述根据固体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定阵列超声换能器的阵元中心频率,具体包括:
17.利用公式确定介质层的超声波反射系数;
18.其中,ds为壳体的厚度,dr为绝热层的厚度,r
ws
为平楔块层和壳体层之间的界面反射系数,r
sr
为壳体层和绝热层之间的界面反射系数,r
ra
为绝热层以及推进剂层之间的界面反射系数,ω为超声频率,α=j2k
sds
,β=j2k
rdr
,ks为壳体层中的波数,kr绝热层中的波数。
19.可选地,所述确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器,具体包括:
20.利用公式确定点x的振动位移频谱;
21.其中,u(x,ω)为点x的振动位移频谱,p为纵波,s为横波,ν0代表换能器激发时表面的振幅,ρ1为平楔块层介质密度,ρ2为固体火箭发动机介质密度,d1为从平楔块层出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,d2为从固体火箭发动机表面出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,θ1为从平楔块层出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,θ2为从固体火箭发动机表面出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,c为材料声速,t
12
为超声波束线折射时的折射系数,s代表阵列超声换能器表面,α代指试样内部纵波p或横波s,c
α2
为
试样内部声速,c
p1
为楔块纵波声速。
22.可选地,所述根据斯涅尔定律确定所设计的阵列超声换能器的阵列超声声束在多层介质中的声束聚焦路径,具体包括:
23.利用公式确定声束传播方向与阵元法向方向的夹角;
24.利用公式确定阵元p所发出声束从阵元到聚焦点的传播时间;
25.利用公式δt
p
=t
max-t
p
确定阵元p的声波激发延迟时间;
26.其中,α1为声束传播方向与阵元法向方向的夹角,|po|
x
为阵元p至聚焦点o的水平距离,li为介质层i的厚度,ci为介质层i中的纵波声速,t
p
为阵元p所发出声束从阵元到聚焦点的传播时间,t
max
为所有阵元中最大的传播时间。
27.一种固体火箭发动机ⅱ界面脱粘的成像检测系统,包括:
28.阵列超声检测模块,用于利用阵列超声换能器对耦合平楔块的固体火箭发动机壳体进行阵列超声检测;所述阵列超声换能器在带编码器的扫查检测工装下夹持;所述平楔块贴合在固体火箭发动机壳体表面;所述固体火箭发动机壳体设在扫查检测工装下;所述阵列超声换能器与阵列超声板卡连接;所述阵列超声板卡用于控制阵列超声换能器进行声波的激励和接收;所述编码器与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声换能器的位置坐标反馈;计算机与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声板卡控制和信号采集;
29.阵元中心频率确定模块,用于根据固体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定阵列超声换能器的阵元中心频率;所述固体火箭发动机包括:平楔块层、壳体层、绝热层以及推进剂层;所述介质的参数包括:介质的厚度、声速以及衰减系数;
30.阵元间距确定模块,用于确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器;所述最优阵元间距为具有最佳声场指向性时的阵元间距;
31.延时法则确定模块,用于根据斯涅尔定律确定所设计的阵列超声换能器的阵列超声声束在多层介质中的声束聚焦路径;进而计算在ⅱ界面进行聚焦时,阵列超声换能器发射和接收声波的延时法则,以此控制阵列超声换能器的超声信号的延迟激励时间,从而使各个阵元激发的子声波通过相位干涉聚焦到ⅱ界面上;
32.脱粘缺陷的成像闸门确定模块,用于基于延时法则,采用预埋ⅱ界面脱粘缺陷的超声检测标准试样进行有无缺陷的对比试验,确定脱粘缺陷的成像闸门;
33.超声回波a型数据确定模块,用于超声板卡采集整个扫查区域的所有的超声回波a型数据,并保存在检测系统中;
34.超声c型图像确定模块,用于利用超声回波信号和编码器提供的位置信号以及成像闸门,将各个位置点对应的超声信号在成像闸门内最大的信号幅值转化为像素点,进而根据整个检测区域的像素点组成ⅱ界面的超声c型图像。
35.可选地,所述阵元中心频率确定模块具体包括:
36.超声波反射系数确定单元,用于利用公式确定介质层的超声波反射系数;
37.其中,ds为壳体的厚度,dr为绝热层的厚度,r
ws
为平楔块层和壳体层之间的界面反射系数,r
sr
为壳体层和绝热层之间的界面反射系数,r
ra
为绝热层以及推进剂层之间的界面反射系数,ω为超声频率,α=j2k
sds
,β=j2k
rdr
,ks为壳体层中的波数,kr绝热层中的波数。
38.可选地,所述阵元间距确定模块具体包括:
39.点x的振动位移频谱确定单元,用于利用公式确定点x的振动位移频谱;
40.其中,u(x,ω)为点x的振动位移频谱,p为纵波,s为横波,ν0代表换能器激发时表面的振幅,ρ1为平楔块层介质密度,ρ2为固体火箭发动机介质密度,d1为从平楔块层出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,d2为从固体火箭发动机表面出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,θ1为从平楔块层出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,θ2为从固体火箭发动机表面出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,c为材料声速,t
12
为超声波束线折射时的折射系数,s代表阵列超声换能器表面,α代指试样内部纵波p或横波s,c
α2
为试样内部声速,c
p1
为楔块纵波声速。
41.可选地,所述延时法则确定模块具体包括:
42.声束传播方向与阵元法向方向的夹角确定单元,用于利用公式确定声束传播方向与阵元法向方向的夹角;
43.阵元p所发出声束从阵元到聚焦点的传播时间确定单元,用于利用公式确定阵元p所发出声束从阵元到聚焦点的传播时间;
44.阵元p的声波激发延迟时间确定单元,用于利用公式δt
p
=t
max-t
p
确定阵元p的声波激发延迟时间;
45.其中,α1为声束传播方向与阵元法向方向的夹角,|po|
x
为阵元p至聚焦点o的水平距离,li为介质层i的厚度,ci为介质层i中的纵波声速,t
p
为阵元p所发出声束从阵元到聚焦点的传播时间,t
max
为所有阵元中最大的传播时间。
46.根据本发明提供的具体实施例,本发明公开了以下技术效果:
47.本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测方法及系统,根据固
体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定阵列超声换能器的阵元中心频率;确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器;基于斯涅尔定律递推计算阵列超声声束路径及聚焦法则。利用所设计的阵列超声换能器进行固体发动机界面扫查检测,基于超声a型信号和编码器信息,在对应位置设置成像闸门形成粘接界面的超声c型扫描图像。本发明能够快速、准确的实现固体火箭发动机ⅱ界面脱粘的快速成像检测;相较于当前检测方法,可以大幅提高检测效率以及缺陷图像信噪比。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
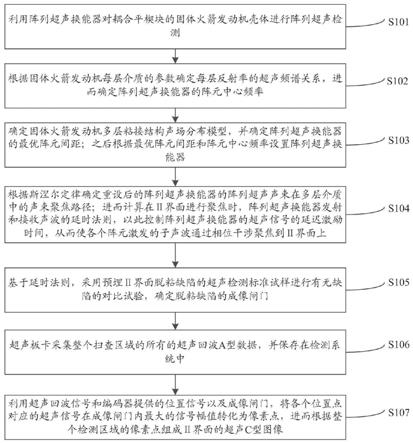
49.图1为本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测方法流程示意图;
50.图2为固体火箭发动机的阵列超声检测方式示意图;
51.图3为绝热层超声信号反射系数与频率的关系曲线示意图;
52.图4为不同阵元间距所对应的绝热层入射声压分布示意图;
53.图5为多层介质中的合成声束聚焦路径示意图;
54.图6为单个阵元激发的声束传播路径示意图;
55.图7为预置脱粘缺陷对比试样的完好界面及脱粘界面a型信号示意图。
56.图8为本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测系统结构示意图。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
58.本发明的目的是提供一种固体火箭发动机ⅱ界面脱粘的成像检测方法及系统,能够提高固体火箭发动机ⅱ界面脱粘检测的效率。
59.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
60.图1为本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测方法流程示意图,如图1所示,本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测方法,包括:
61.s101,利用阵列超声换能器对耦合平楔块的固体火箭发动机壳体进行阵列超声检测;如图2所示,所述阵列超声换能器在带编码器的扫查检测工装下夹持;所述平楔块贴合在固体火箭发动机壳体表面;所述固体火箭发动机壳体设在扫查检测工装下;所述阵列超声换能器与阵列超声板卡连接;所述阵列超声板卡用于控制阵列超声换能器进行声波的激
励和接收;所述编码器与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声换能器的位置坐标反馈;计算机与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声板卡控制和信号采集;
62.s102,根据固体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定阵列超声换能器的阵元中心频率;所述固体火箭发动机包括:平楔块层、壳体层、绝热层以及推进剂层;所述介质的参数包括:介质的厚度、声速以及衰减系数;
63.s102具体包括:
64.利用公式确定介质层的超声波反射系数;
65.其中,ds为壳体的厚度,dr为绝热层的厚度,r
ws
为平楔块层和壳体层之间的界面反射系数,r
sr
为壳体层和绝热层之间的界面反射系数,r
ra
为绝热层以及推进剂层之间的界面反射系数,ω为超声频率,α=j2k
sds
,β=j2k
rdr
,ks为壳体层中的波数,kr绝热层中的波数。
66.其中,r
mn
=(z
n-zm)/(zn+zm),zn和zm为介质n和介质m的声阻抗,km=ω/cm为介质m中的波数,为复声速,为不考虑介质中衰减时的声速,βm为衰减因子。
67.选择使绝热层超声反射系数r2(ω)具有最大值时对应的超声频率作为阵列超声换能器中心频率。
68.针对具体实施例中的试样参数建立的反射系数的频谱关系曲线如图3所示,从图3中可见,超声频率为2mhz时,可以获得最优的缺陷信号,故该值为换能器最优中心频率,并以此定制用于检测的超声换能器。
69.s103,确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器;所述最优阵元间距为具有最佳声场指向性时的阵元间距;
70.作为一个具体的实施例,基于瑞丽积分模型,建立多层粘接结构的声场分布模型,依据斯涅尔定律确定声束在试样中的折射角度,利用叠加原理对是试样中的声场分布进行计算。
71.s103具体包括:
72.利用公式确定点x的振动位移频谱;
73.其中,u(x,ω)为点x的振动位移频谱,p为纵波,s为横波,ν0代表换能器激发时表面的振幅,ρ1为平楔块层介质密度,ρ2为固体火箭发动机介质密度,d1为从平楔块层出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,d2为从固体火箭发动机表面出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,θ1为从平楔块层出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,θ2为从固体火箭发动机表
面出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,c为材料声速,t
12
为超声波束线折射时的折射系数,s代表阵列超声换能器表面,α代指试样内部纵波p或横波s,c
α2
为试样内部声速,c
p1
为楔块纵波声速。
74.计算阵列超声声束聚焦在ⅱ界面处时,绝热层中的入射声场强度分布。仿真计算不同阵元间距下的界面声场分布,选择聚焦中心声场强度高且阵列超声栅瓣能量低对应的阵元间距,采用所选取的阵元间距和阵元中心频率对超声换能器进行设计和定制。
75.计算阵列超声声束聚焦在ⅱ界面处时,不同阵元间距下阵列超声在绝热层入射界面上的声压分布情况,如图4所示,其中横坐标为绝热层入射界面上沿阵元排布方向的横向距离,纵坐标为界面上归一化声压幅值。选择其中超声主瓣宽度较窄且超声栅瓣能量较低对应的阵元间距值,实施例中为1.0mm,作为最优阵列超声阵元间距,用于阵列超声换能器工艺进行设计定制。
76.s104,根据斯涅尔定律确定所设计的阵列超声换能器的阵列超声声束在多层介质中的声束聚焦路径;进而计算在ⅱ界面进行聚焦时,阵列超声换能器发射和接收声波的延时法则,以此控制阵列超声换能器的超声信号的延迟激励时间,从而使各个阵元激发的子声波通过相位干涉聚焦到ⅱ界面上;
77.s104具体包括:
78.利用公式确定声束传播方向与阵元法向方向的夹角;即计算阵列超声延时聚焦法则,通过控制各阵元激发声波的延迟时间,使子声波产生相位干涉,以此使各子声波的主能量的传播方向如图5中的声束路径所示。为计算延迟时间,需首先计算每条声束的传播路径,如图6所示,依据斯涅尔定律,声束的初始传播角度α1(声束传播方向与阵元法向方向的夹角)满足
79.利用公式确定阵元p所发出声束从阵元到聚焦点的传播时间;
80.利用公式δt
p
=t
max-t
p
确定阵元p的声波激发延迟时间;
81.其中,α1为声束传播方向与阵元法向方向的夹角,|po|
x
为阵元p至聚焦点o的水平距离,li为介质层i的厚度,ci为介质层i中的纵波声速,t
p
为阵元p所发出声束从阵元到聚焦点的传播时间,t
max
为所有阵元中最大的传播时间。
82.计算出为使得声波从阵元发出传播至聚焦点声束需偏转的角度,进而唯一确定声束路径。结合介质的声速信息可确定阵元p激发的声波在介质中的传播路径和时间t
p
,其对应的发射激励时间δt
p
=t
max-t
p
,其中t
max
为所有阵元中的最大传播时间。计算所有阵元的延时激励时间可组成检测所需的延时聚焦法则。
83.以此形成阵列超声延时聚焦法则,按照聚焦法则依次激励换能器的阵元晶片,可以使各阵元激发的子声波发生相位干涉,从而实现在试样内部的声波聚焦。
84.s105,基于延时法则,采用预埋ⅱ界面脱粘缺陷的超声检测标准试样进行有无缺陷的对比试验,确定脱粘缺陷的成像闸门;
85.s105具体包括:
86.采用阵列超声换能器一定孔径的阵元对按照延时聚焦法则进行超声激励,所激发的聚焦声波传播至缺陷界面会发生发射,采用换能器对超声回波信号进行接收,界面在有无缺陷时,信号幅值、相位等会存在明显差异,并以信号差异显著区域对应的信号时间范围作为成像闸门。
87.采用预置ⅱ界面脱粘缺陷的多层粘接结构试样进行ⅱ界面单点聚焦检测,使阵列换能器激发的声波在界面处实现聚焦,声波在粘接界面和缺陷界面处会发生折射和反射,采用换能器接收粘接完好和存在脱粘缺陷时的超声a型信号,其中a型信号指超声换能器在特定位置激发声波后,在一定时间内接收到的声压随时间变化的超声信号。通过计算声波传播到粘接界面的时间,或对比完好粘接和脱粘信号的差异位置,确定界面信号的时间范围,如图7所示,该时间范围称为成像闸门。
88.s106,超声板卡采集整个扫查区域的所有的超声回波a型数据,并保存在检测系统中;
89.s106具体包括:
90.采用扫查机构带动阵列超声换能器对发动机多层粘接结构进行扫查,阵列超声板卡依据发射和接收聚焦法则控制阵列超声换能器进行声波的发射和接收,并采集获取整个检测区域的各个位置的超声换能器所接收到的a型信号以及各位置对应的编码器坐标数据,保存在检测系统中。
91.s107,利用超声回波信号和编码器提供的位置信号以及成像闸门,将各个位置点对应的超声信号在成像闸门内最大的信号幅值转化为像素点,进而根据整个检测区域的像素点组成ⅱ界面的超声c型图像。
92.图8为本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测系统结构示意图,如图8所示,本发明所提供的一种固体火箭发动机ⅱ界面脱粘的成像检测系统,包括:
93.阵列超声检测模块801,用于利用阵列超声换能器对耦合平楔块的固体火箭发动机壳体进行阵列超声检测;所述阵列超声换能器在带编码器的扫查检测工装下夹持;所述平楔块贴合在固体火箭发动机壳体表面;所述固体火箭发动机壳体设在扫查检测工装下;所述阵列超声换能器与阵列超声板卡连接;所述阵列超声板卡用于控制阵列超声换能器进行声波的激励和接收;所述编码器与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声换能器的位置坐标反馈;计算机与阵列超声板卡连接;所述阵列超声板卡还用于进行阵列超声板卡控制和信号采集;
94.阵元中心频率确定模块802,用于根据固体火箭发动机每层介质的参数确定每层反射率的超声频谱关系,进而确定阵列超声换能器的阵元中心频率;所述固体火箭发动机包括:平楔块层、壳体层、绝热层以及推进剂层;所述介质的参数包括:介质的厚度、声速以及衰减系数;
95.阵元间距确定模块803,用于确定固体火箭发动机多层粘接结构声场分布模型,并确定阵列超声换能器的最优阵元间距;之后根据最优阵元间距和阵元中心频率设置阵列超声换能器;所述最优阵元间距为具有最佳声场指向性时的阵元间距;
96.延时法则确定模块804,用于根据斯涅尔定律确定所设计的阵列超声换能器的阵列超声声束在多层介质中的声束聚焦路径;进而计算在ⅱ界面进行聚焦时,阵列超声换能器发射和接收声波的延时法则,以此控制阵列超声换能器的超声信号的延迟激励时间,从
而使各个阵元激发的子声波通过相位干涉聚焦到ⅱ界面上;
97.脱粘缺陷的成像闸门确定模块805,用于基于延时法则,采用预埋ⅱ界面脱粘缺陷的超声检测标准试样进行有无缺陷的对比试验,确定脱粘缺陷的成像闸门;
98.超声回波a型数据确定模块806,用于超声板卡采集整个扫查区域的所有的超声回波a型数据,并保存在检测系统中;
99.超声c型图像确定模块807,用于利用超声回波信号和编码器提供的位置信号以及成像闸门,将各个位置点对应的超声信号在成像闸门内最大的信号幅值转化为像素点,进而根据整个检测区域的像素点组成ⅱ界面的超声c型图像。
100.所述阵元中心频率确定模块802具体包括:
101.超声波反射系数确定单元,用于利用公式确定介质层的超声波反射系数;
102.其中,ds为壳体的厚度,dr为绝热层的厚度,r
ws
为平楔块层和壳体层之间的界面反射系数,r
sr
为壳体层和绝热层之间的界面反射系数,r
ra
为绝热层以及推进剂层之间的界面反射系数,ω为超声频率,α=j2k
sds
,β=j2k
rdr
,ks为壳体层中的波数,kr绝热层中的波数。
103.所述阵元间距确定模块803具体包括:
104.点x的振动位移频谱确定单元,用于利用公式确定点x的振动位移频谱;
105.其中,u(x,ω)为点x的振动位移频谱,p为纵波,s为横波,ν0代表换能器激发时表面的振幅,ρ1为平楔块层介质密度,ρ2为固体火箭发动机介质密度,d1为从平楔块层出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,d2为从固体火箭发动机表面出发传播至固体火箭发动机内部点x的超声波束在材料中的传播距离,θ1为从平楔块层出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,θ2为从固体火箭发动机表面出发传播传播至固体火箭发动机内部点x与折射法平面的夹角,c为材料声速,t
12
为超声波束线折射时的折射系数,s代表阵列超声换能器表面,α代指试样内部纵波p或横波s,c
α2
为试样内部声速,c
p1
为楔块纵波声速。
106.所述延时法则确定模块804具体包括:
107.声束传播方向与阵元法向方向的夹角确定单元,用于利用公式确定声束传播方向与阵元法向方向的夹角;
108.阵元p所发出声束从阵元到聚焦点的传播时间确定单元,用于利用公式
确定阵元p所发出声束从阵元到聚焦点的传播时间;
109.阵元p的声波激发延迟时间确定单元,用于利用公式δt
p
=t
max-t
p
确定阵元p的声波激发延迟时间;
110.其中,α1为声束传播方向与阵元法向方向的夹角,|po|
x
为阵元p至聚焦点o的水平距离,li为介质层i的厚度,ci为介质层i中的纵波声速,t
p
为阵元p所发出声束从阵元到聚焦点的传播时间,t
max
为所有阵元中最大的传播时间。
111.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
112.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1