一种基于多尺度模糊熵的损伤识别方法及系统
1.本发明涉及结构健康监测技术领域,特别是涉及一种基于多尺度模糊熵的损伤识别方法及系统。
背景技术:
2.飞行器在飞行过程中结构可能会产生损伤,采用结构健康监测技术可以对结构的健康状态进行监测,保障飞行器的安全。其中基于lamb波的结构健康监测技术因其远距离传播和对传播路径附近的非均质结构具有高灵敏度特性,广泛应用于类板结构监测中。但是飞行器在高空飞行时,结构的温度和测试环境都会发生变化,导致压电传感器采集到的lamb波信号与基准信号产生差异。由于除了损伤还有温度因素,结构健康状态的诊断会产生偏差。
3.为了尽可能减小温度变化对结构损伤识别的影响,早期提出的最优基准法、基准信号扩展法耗时长,计算量大。之后利用深度学习、协整、pca降维等方法尝试提取出不受温度影响的信号特征,需要大量的训练数据样本及计算时间,难以应用于实际工程中。
4.针对上述问题,利用信号特征值进行rapid(reconstruction algorithm for probabilistic inspection of damage)损伤成像可以得到结构健康诊断结果,但是信号特征值对温度敏感,采用该信号特征值进行rapid损伤成像不能在环境温度变化下达到较好的损伤识别效果,因此找到一个对温度不敏感、对损伤敏感的信号特征是解决温度对损伤识别影响的关键。然而无论是信号的时域特征或是频域特征,还是与基准信号之间的相关系数,均不能在环境温度变化下达到较好的损伤识别效果。
5.综上,如何得到对温度鲁棒性强且对损伤敏感度高的信号特征,避免或减小温度效应对损伤识别产生的干扰,以在环境温度变化下实现损伤的准确定位,成为本领域技术人员亟待解决的问题。
技术实现要素:
6.本发明的目的是提供一种基于多尺度模糊熵的损伤识别方法及系统,从而在环境温度变化下实现损伤的准确定位。
7.为实现上述目的,本发明提供了如下方案:
8.一种基于多尺度模糊熵的损伤识别方法,所述方法包括:
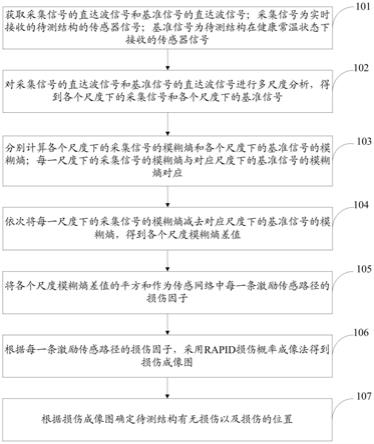
9.获取采集信号的直达波信号和基准信号的直达波信号;所述采集信号为实时接收的待测结构的传感器信号;所述基准信号为待测结构在健康常温状态下接收的传感器信号;
10.对所述采集信号的直达波信号和所述基准信号的直达波信号进行多尺度分析,得到各个尺度下的采集信号和各个尺度下的基准信号;
11.分别计算所述各个尺度下的采集信号的模糊熵和所述各个尺度下的基准信号的模糊熵;每一尺度下的采集信号的模糊熵与对应尺度下的基准信号的模糊熵对应;
12.依次将所述每一尺度下的采集信号的模糊熵减去对应尺度下的基准信号的模糊熵,得到各个尺度模糊熵差值;
13.将所述各个尺度模糊熵差值的平方和作为传感网络中每一条激励传感路径的损伤因子;
14.根据所述每一条激励传感路径的损伤因子,采用rapid损伤概率成像法得到损伤成像图;
15.根据所述损伤成像图确定待测结构有无损伤以及损伤的位置。
16.可选地,所述获取采集信号的直达波信号和基准信号的直达波信号,之前还包括:
17.获取采集信号和基准信号;
18.根据激励信号的中心频率对所述采集信号和所述基准信号进行小波变换,确定直达波的到达时间;
19.根据所述到达时间截取采集信号的直达波信号和基准信号的直达波信号。
20.可选地,所述对所述采集信号的直达波信号和所述基准信号的直达波信号进行多尺度分析,得到各个尺度下的采集信号和各个尺度下的基准信号,具体包括:
21.对所述采集信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的采集信号;
22.对所述基准信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的基准信号。
23.可选地,所述分别计算所述各个尺度下的采集信号的模糊熵和所述各个尺度下的基准信号的模糊熵,具体包括:
24.将所述各个尺度下的采集信号和所述各个尺度下的基准信号分别转换成m维向量空间中的向量;
25.计算m维向量空间中的两个所述向量的距离;
26.根据m维向量空间中的两个所述向量的距离,利用模糊隶属度函数得到m维向量空间中的两个所述向量之间的相似程度;
27.根据m维向量空间中的两个所述向量之间的相似程度得到m维向量空间中的任一所述向量与其余所述向量的相似概率;
28.将所有所述相似概率相加除以m维向量空间中的向量的总数,得到第一函数值;
29.将所述各个尺度下的采集信号和所述各个尺度下的基准信号分别转换成m+1维向量空间中的向量;
30.计算m+1维向量空间中的两个所述向量的距离;
31.根据m+1维向量空间中的两个所述向量的距离,利用模糊隶属度函数得到m+1维向量空间中的两个所述向量之间的相似程度;
32.根据m+1维向量空间中的两个所述向量之间的相似程度得到m+1维向量空间中的任一所述向量与其余所述向量的相似概率;
33.将所有所述相似概率相加除以m+1维向量空间中的向量的总数,得到第二函数值;
34.根据所述第二函数值与所述第一函数值的比值得到所述各个尺度下的采集信号的模糊熵和所述各个尺度下的基准信号的模糊熵。
35.可选地,所述根据所述每一条激励传感路径的损伤因子,采用rapid损伤概率成像
法得到损伤成像图,具体包括:
36.计算传感网络中每一条激励传感路径上的损伤因子的值;
37.建立所述传感网络的离散坐标系;所述离散坐标系包括多个离散坐标点;
38.根据每一所述损伤因子的值得到每一条激励传感路径的每一离散坐标点的损伤概率值;
39.叠加所有激励传感路径的离散坐标点的损伤概率值,将损伤概率值最大处确定为损伤缺陷处;
40.将每一离散坐标点的所述损伤概率值作为像素值建立强度图,并对所述强度图进行图像归一化处理,得到损伤成像图;所述损伤成像图用于确定待测结构有无损伤以及损伤的位置。
41.本发明还提供了如下方案:
42.一种基于多尺度模糊熵的损伤识别系统,所述系统包括:
43.直达波信号获取模块,用于获取采集信号的直达波信号和基准信号的直达波信号;所述采集信号为实时接收的待测结构的传感器信号;所述基准信号为待测结构在健康常温状态下接收的传感器信号;
44.多尺度分析模块,用于对所述采集信号的直达波信号和所述基准信号的直达波信号进行多尺度分析,得到各个尺度下的采集信号和各个尺度下的基准信号;
45.模糊熵计算模块,用于分别计算所述各个尺度下的采集信号的模糊熵和所述各个尺度下的基准信号的模糊熵;每一尺度下的采集信号的模糊熵与对应尺度下的基准信号的模糊熵对应;
46.模糊熵差值得到模块,用于依次将所述每一尺度下的采集信号的模糊熵减去对应尺度下的基准信号的模糊熵,得到各个尺度模糊熵差值;
47.各路径损伤因子得到模块,用于将所述各个尺度模糊熵差值的平方和作为传感网络中每一条激励传感路径的损伤因子;
48.损伤概率成像模块,用于根据所述每一条激励传感路径的损伤因子,采用rapid损伤概率成像法得到损伤成像图;
49.损伤及损伤位置确定模块,用于根据所述损伤成像图确定待测结构有无损伤以及损伤的位置。
50.可选地,所述系统还包括:
51.信号获取模块,用于获取采集信号和基准信号;
52.直达波到达时间确定模块,用于根据激励信号的中心频率对所述采集信号和所述基准信号进行小波变换,确定直达波的到达时间;
53.直达波信号截取模块,用于根据所述到达时间截取采集信号的直达波信号和基准信号的直达波信号。
54.可选地,所述多尺度分析模块具体包括:
55.第一粗粒化处理单元,用于对所述采集信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的采集信号;
56.第二粗粒化处理单元,用于对所述基准信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的基准信号。
57.可选地,所述模糊熵计算模块具体包括:
58.第一转换单元,用于将所述各个尺度下的采集信号和所述各个尺度下的基准信号分别转换成m维向量空间中的向量;
59.第一距离计算单元,用于计算m维向量空间中的两个所述向量的距离;
60.第一相似程度得到单元,用于根据m维向量空间中的两个所述向量的距离,利用模糊隶属度函数得到m维向量空间中的两个所述向量之间的相似程度;
61.第一相似概率得到单元,用于根据m维向量空间中的两个所述向量之间的相似程度得到m维向量空间中的任一所述向量与其余所述向量的相似概率;
62.第一函数值得到单元,用于将所有所述相似概率相加除以m维向量空间中的向量的总数,得到第一函数值;
63.第二转换单元,用于将所述各个尺度下的采集信号和所述各个尺度下的基准信号分别转换成m+1维向量空间中的向量;
64.第二距离计算单元,用于计算m+1维向量空间中的两个所述向量的距离;
65.第二相似程度得到单元,用于根据m+1维向量空间中的两个所述向量的距离,利用模糊隶属度函数得到m+1维向量空间中的两个所述向量之间的相似程度;
66.第二相似概率得到单元,用于根据m+1维向量空间中的两个所述向量之间的相似程度得到m+1维向量空间中的任一所述向量与其余所述向量的相似概率;
67.第二函数值得到单元,用于将所有所述相似概率相加除以m+1维向量空间中的向量的总数,得到第二函数值;
68.模糊熵得到单元,用于根据所述第二函数值与所述第一函数值的比值得到所述各个尺度下的采集信号的模糊熵和所述各个尺度下的基准信号的模糊熵。
69.可选地,所述损伤概率成像模块具体包括:
70.损伤因子值计算单元,用于计算传感网络中每一条激励传感路径上的损伤因子的值;
71.离散坐标系建立单元,用于建立所述传感网络的离散坐标系;所述离散坐标系包括多个离散坐标点;
72.损伤概率值计算单元,用于根据每一所述损伤因子的值得到每一条激励传感路径的每一离散坐标点的损伤概率值;
73.叠加单元,用于叠加所有激励传感路径的离散坐标点的损伤概率值,将损伤概率值最大处确定为损伤缺陷处;
74.损伤成像图得到单元,用于将每一离散坐标点的所述损伤概率值作为像素值建立强度图,并对所述强度图进行图像归一化处理,得到损伤成像图;所述损伤成像图用于确定待测结构有无损伤以及损伤的位置。
75.根据本发明提供的具体实施例,本发明公开了以下技术效果:
76.本发明公开的基于多尺度模糊熵的损伤识别方法及系统,分别计算各个尺度下的采集信号的模糊熵和各个尺度下的基准信号的模糊熵,依次将每一尺度下的采集信号的模糊熵减去对应尺度下的基准信号的模糊熵,得到各个尺度模糊熵差值,将各个尺度模糊熵差值的平方和作为传感网络中每一条激励传感路径的损伤因子;选用模糊熵作为损伤因子表征信号,抗噪能力和温度鲁棒性强;通过基于多尺度模糊熵的损伤因子计算方法,获得了
对温度鲁棒性强且对损伤敏感度高的信号特征作为损伤因子,避免或减小了温度效应对损伤识别产生的干扰,在变温环境中实现了损伤的准确定位。
附图说明
77.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
78.图1为本发明基于多尺度模糊熵的损伤识别方法实施例的流程图;
79.图2为本发明中损伤诊断的流程图;
80.图3为本发明多尺度模糊熵方法的粗粒化过程示意图;
81.图4为本发明直达波经粗粒化后各尺度信号示意图;
82.图5为本发明铝板损伤位置和传感器分布图;
83.图6为本发明各路径信号的直达波包示意图;
84.图7为本发明路径1-5的采集信号与基准信号多尺度熵曲线图;
85.图8为本发明铝板55℃时的损伤成像示意图;
86.图9为本发明基于多尺度模糊熵的损伤识别系统实施例的结构图。
具体实施方式
87.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
88.本发明的目的是提供一种基于多尺度模糊熵的损伤识别方法及系统,从而在环境温度变化下实现损伤的准确定位。
89.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
90.图1为本发明基于多尺度模糊熵的损伤识别方法实施例的流程图,图2为本发明中损伤诊断的流程图。参见图1和图2,该基于多尺度模糊熵的损伤识别方法包括:
91.步骤101:获取采集信号的直达波信号和基准信号的直达波信号;采集信号为实时接收的待测结构的传感器信号;基准信号为待测结构在健康常温状态下接收的传感器信号。
92.该步骤101之前还包括:
93.获取采集信号和基准信号。
94.根据激励信号的中心频率对采集信号和基准信号进行小波变换,确定直达波的到达时间。
95.根据到达时间截取采集信号的直达波信号和基准信号的直达波信号。
96.该步骤101读取待测结构的采集信号(实时接收到的待测结构的传感器信号)与基准信号(待测结构在健康常温状态下接收的传感器信号),截取各信号的直达波:根据激励
信号的中心频率f对信号进行小波变换,确定直达波的到达时间,根据到达时间截取直达波信号,最终得到采集信号的直达波和基准信号的直达波。
97.步骤102:对采集信号的直达波信号和基准信号的直达波信号进行多尺度分析,得到各个尺度下的采集信号和各个尺度下的基准信号。
98.该步骤102具体包括:
99.对采集信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的采集信号。
100.对基准信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的基准信号。
101.该步骤102对各直达波信号x={x(1),x(2),l,x(n)}(x(n)代表一个信号序列中的数值,1≤n≤n,x代表一个信号序列,即步骤101得到的直达波信号)进行多尺度分析,即对单一信号(采集信号的直达波x={x(1),x(2),l,x(n)}或者基准信号的直达波x={x(1),x(2),l,x(n)},这些直达波都要经过相同的处理,因此此处选了其中某个直达波进行计算)进行多时间尺度的粗粒化处理(对采集信号的直达波x={x(1),x(2),l,x(n)}进行多时间尺度的粗粒化处理,以及对基准信号的直达波x={x(1),x(2),l,x(n)}进行多时间尺度的粗粒化处理,所有信号都要进行同样的处理步骤,因此此处不加区分),如图3所示,其中粗粒化产生子序列:
102.y
τ
={y
τ
(1),y
τ
(2),l,y
τ
(j),l}
ꢀꢀꢀ
(1)
[0103][0104]
公式(1)是将某个直达波信号进行粗粒化处理后得到的新的信号序列,公式(2)是对原始序列进行粗粒化的计算公式,即公式(1)中每个数值y(j)的计算由来。n是步骤101中得到的直达波序列的长度,即直达波信号x={x(1),x(2),l,x(n)}的长度,τ是尺度因子,如果τ过大,会导致某些尺度中数据过少,计算的熵值不稳定且丢失原始信息,增加无意义的计算量;如果τ过小,无法反映完整信号特征信息。一般选择原则可根据多尺度熵值曲线的平稳度来确定,即当尺度达到某一值后,熵值曲线区于平稳,则可将尺度因子设为该值,每个尺度数据长度最好不小于100。
[0105]
粗粒化可以从多尺度衡量时间序列的复杂性,降低噪声等其他因素的影响,随着尺度的增加,信号的长度越来越短,如图4所示。
[0106]
步骤103:分别计算各个尺度下的采集信号的模糊熵和各个尺度下的基准信号的模糊熵;每一尺度下的采集信号的模糊熵与对应尺度下的基准信号的模糊熵对应。
[0107]
该步骤103具体包括:
[0108]
将各个尺度下的采集信号和各个尺度下的基准信号分别转换成m维向量空间中的向量。
[0109]
计算m维向量空间中的两个向量的距离。
[0110]
根据m维向量空间中的两个向量的距离,利用模糊隶属度函数得到m维向量空间中的两个向量之间的相似程度。
[0111]
根据m维向量空间中的两个向量之间的相似程度得到m维向量空间中的任一向量与其余向量的相似概率。
[0112]
将所有相似概率相加除以m维向量空间中的向量的总数,得到第一函数值。
[0113]
将各个尺度下的采集信号和各个尺度下的基准信号分别转换成m+1维向量空间中的向量。
[0114]
计算m+1维向量空间中的两个向量的距离。
[0115]
根据m+1维向量空间中的两个向量的距离,利用模糊隶属度函数得到m+1维向量空间中的两个向量之间的相似程度。
[0116]
根据m+1维向量空间中的两个向量之间的相似程度得到m+1维向量空间中的任一向量与其余向量的相似概率。
[0117]
将所有相似概率相加除以m+1维向量空间中的向量的总数,得到第二函数值。
[0118]
根据第二函数值与第一函数值的比值得到各个尺度下的采集信号的模糊熵和各个尺度下的基准信号的模糊熵。
[0119]
该步骤103计算各个尺度下信号的模糊熵,具体过程如下:
[0120]
(1)将步骤102中各尺度下的信号y
τ
={y
τ
(1),y
τ
(2),l,y
τ
(m)},(m是公式(2)中j的上限值,即粗粒化序列的长度上限)进行重构,变成m维向量空间中的向量:
[0121][0122][0123]
式中,为τ尺度粗粒化后得到的序列进行m维重构空间中的第i个向量。公式(4)是公式(3)中重构向量均值的计算公式。其中1≤i≤m-m+1,为重构向量的均值。重构时,首先决定m的数值即重构空间的维数,如果是2维就从粗粒化序列中分别取构成一组2维空间的向量,3维以此类推。
[0124]
(2)计算两个m维向量距离,两个向量之间的距离定义为对应元素差值绝对值的最大值:
[0125][0126]
式中,是τ尺度粗粒化后得到的序列进行m维重构空间中的第i个向量和第j个向量的距离,以向量对应数值差的绝对值的最大值为两个向量距离。为第i个向量的第k个数值。其中i,j=1,2,l,m-m,i≠j。
[0127]
(3)利用模糊隶属度函数定义两个向量之间的相似程度:
[0128][0129]
式中,r为相似容限参数,一般选择0.1~0.25std(x),std(x)为原始数据的标准
差。
[0130]
(4)定义函数:
[0131][0132][0133]
式中,是公式(3)中定义的信号τ尺度粗粒化后得到的序列进行m维重构空间中的第i个向量和第j个向量的相似程度。即信号τ尺度粗粒化后得到的序列进行m维重构空间中的第i个向量与所有非自身向量的相似概率。bm(τ)是将所有向量的相似概率相加除以向量总数得到τ尺度粗粒化m维重构空间的一个函数值。
[0134]
(5)计算m+1维中的各量,重复过程(1)~(4),得到:
[0135][0136][0137]
(6)模糊熵表达式为:
[0138][0139]
式中,fuzzyen(m,τ,r,n)表示的是r为相似容限参数、m为重构空间维数、n为模糊隶属度函数中的指数的情况下,信号τ尺度粗粒化时的模糊熵值。公式(10)与公式(8)的比值取对数表示两个维数的函数值之比,当维数增加时,如果有新信息的产生,那么向量之间距离变大,相似程度变小,模糊熵增大;因此,公式(11)可以衡量信号的复杂程度。
[0140]
在数据量有限时,上式可以近似表示为:
[0141]
fuzzyen(m,τ,r,n,m)=-in[b
m+1
(r)/bm(r)]
ꢀꢀꢀ
(12)
[0142]
通常嵌入维数m=2,当m>2时,一方面需要更多的原始时间序列从而造成计算量的增加;另一方面过大的m需要r值增大以保证较好的计算结果,但过大的r会导致有效信息丢失。为使模糊熵与其反映的时间序列关联性更大,相似容限r=0.1~0.25std(y
τ
)。模糊隶属度函数中的指数n必须是一个小的整数值,因为大的n值会由于边界较宽而导致信息丢失。而且,当n<1时,算法对距离较远的向量权值比距离较近的向量大,因此一般取n=2。
[0143]
(7)采集信号和基准信号经粗粒化后各尺度模糊熵表示为:
[0144]
采集信号:dmfe(i)=fuzzyen(m,i,r,n,m),i=1,2,k,τ
ꢀꢀꢀ
(13)
[0145]
基准信号:hmfe(i)=fuzzyen(m,i,r,n,m),i=1,2,k,τ
ꢀꢀꢀ
(14)
[0146]
式中m=2,n=2,r=0.1~0.25std(y
τ
),
[0147]
步骤104:依次将每一尺度下的采集信号的模糊熵减去对应尺度下的基准信号的模糊熵,得到各个尺度模糊熵差值。
[0148]
该步骤104将各个采集信号的多尺度模糊熵dmfe减去基准信号对应尺度的熵hmfe,各个尺度熵差值的平方和作为各路径的损伤因子di:
[0149]
mfe(i)=dmfe(i)-hmfe(i),i=1,2,l,τ
ꢀꢀꢀ
(15)
[0150][0151]
目前现有技术有采用样本熵的方法,但是多尺度样本熵存在不稳定和突变现象,还需要筛选最优尺度,比如用蚁群算法来筛选最优尺度。本发明采用模糊熵,通过模糊隶属度函数改进了样本熵这一不足,结果稳定不需要筛选尺度来提取特征,更不需要采用蚁群算法优化。
[0152]
步骤105:将各个尺度模糊熵差值的平方和作为传感网络中每一条激励传感路径的损伤因子。
[0153]
步骤106:根据每一条激励传感路径的损伤因子,采用rapid损伤概率成像法得到损伤成像图。
[0154]
该步骤106具体包括:
[0155]
计算传感网络中每一条激励传感路径上的损伤因子的值。
[0156]
建立传感网络的离散坐标系;离散坐标系包括多个离散坐标点。
[0157]
根据每一损伤因子的值得到每一条激励传感路径的每一离散坐标点的损伤概率值。
[0158]
叠加所有激励传感路径的离散坐标点的损伤概率值,将损伤概率值最大处确定为损伤缺陷处。
[0159]
将每一离散坐标点的损伤概率值作为像素值建立强度图,并对强度图进行图像归一化处理,得到损伤成像图;损伤成像图用于确定待测结构有无损伤以及损伤的位置。
[0160]
该步骤106采用rapid损伤概率成像法。对于某一条激励传感路径而言,损伤位置距离该条路径越近,基准信号与损伤信号差异性就越大,那么损伤信号的di值也就越大,根据不同路径的di值从而实现对结构状态的监测。定位步骤如下:
[0161]
(1)计算传感网络中每一条激励传感路径上的di值。
[0162]
(2)建立传感网络的离散坐标系,将每条激励传感路径计算得到的di值作为损伤缺陷出现的概率值映射到离散坐标点上。定义各路径各点概率值p为:
[0163][0164][0165]
公式(17)是对某个离散坐标点的损伤概率值的计算,公式(18)是公式(17)中r值的计算公式,即该点到激励器与接收器的距离之和比上激励器与接收器之间的距离,衡量该点是否在椭圆影响范围里。式中,l为路径,1≤l≤l,l为路径总数。r
a,l
(x,y)为某点到第l
条路径上激励传感器的距离,r
s,l
(x,y)为某点到第l条路径上接收传感器的距离,r
as,l
为第l条路径上激励传感器和接收传感器之间的距离,r
l
(x,y)为某个点到第l条路径上激励传感器和接收传感器的距离之和比上激励传感器和接收传感器之间的距离,β代表一对传感器的检测面积,决定了以激励传感器和接收传感器位置为焦点的椭圆影响范围,为了提高成像的精确性,一般取1.01~1.05。
[0166]
(3)叠加所有路径的离散点概率值概率值最大处即为损伤缺陷处。将所有路径的p值相加:
[0167][0168]
(4)将每一离散点的p值作为像素值建立强度图,并进行图像归一化处理:
[0169][0170]
根据p'得到的强度图即为最终的损伤成像图,损伤处的像素值要大于无损伤处。
[0171]
该步骤106采用的rapid损伤概率成像法的过程是现有技术,本发明对于不同β值进行了尝试,最终选择了1.01以及对最终的成像图加了图像归一化,但大致步骤与现有技术中rapid损伤概率成像法的过程基本相同。
[0172]
步骤107:根据损伤成像图确定待测结构有无损伤以及损伤的位置。
[0173]
该步骤107根据损伤成像图可以得到结构的健康状态(有无损伤)以及损伤的位置。
[0174]
下面以一个具体实施例说明本发明的技术方案:
[0175]
以400
×
400mm的铝板为例,在四边贴上吸波胶以减少边界反射。布置8个传感器,围成200
×
200mm正方形,左下角传感器记为0号进行顺时针编号,用100g砝码模拟损伤,损伤和传感器位置如图5所示。中心频率为50khz,采样率为5mhz,采样点数5000点。
[0176]
以20℃的健康信号为基准,在损伤状态下采集20℃~55℃范围内的信号,对不同温度下的信号进行损伤定位成像。
[0177]
对于铝板的损伤定位成像,具体实现步骤如图2所示,操作流程主要分成五个步骤:
[0178]
步骤1:读取信号并利用小波变换截取各路径信号的直达波包,如图6所示。
[0179]
步骤2:对各直达波信号分别进行多时间尺度的粗粒化处理。
[0180]
步骤3:计算基准信号与采集信号的直达波包的多尺度模糊熵,分别为dmfe和hmfe,多尺度熵计算参数为:m=2,n=2,r=0.25std(x),τ=5。例:路径1-5的采集信号与基准信号多尺度熵曲线如图7所示。
[0181]
步骤4:判断dmfe-hmfe是否存在熵值小于0的尺度,若存在,则说明该条路径是健康路径,令di=0;否则,则说明该路径可能是损伤路径,令di为基准信号与采集信号的各尺度熵差值的平方和。
[0182]
步骤5:利用每条路径得出的di值进行rapid成像:将传感网络划分为200
×
200的单元,再将每条路径的di值映射到每个单元,叠加所有路径,将每个单元的损伤概率值作为
像素成像,其中β=1.01。
[0183]
将各路径55℃的采集信号与20℃的基准信号输入程序,得到55℃损伤定位结果如图8所示,损伤位置显示为(150,100),与实际损伤位置相符,表明即使在环境温度变化下,通过多尺度熵也可以对损伤进行准确的定位成像。
[0184]
与现有技术相比,本发明具有如下优点:
[0185]
1、选用模糊熵作为损伤因子表征信号,抗噪能力和温度鲁棒性强。
[0186]
2、采用多尺度模糊熵实现了环境温度变化下的损伤识别。
[0187]
本发明在发现损伤信号与健康信号的多尺度模糊熵值明显不同并且损伤信号的各尺度熵值均在健康信号之上的基础上,进行温度实验,发现在温度变化的情况下,多尺度模糊熵仍然可识别出损伤信号,即使损伤信号与基准信号的实验温度不同,损伤信号的模糊熵依然大于基准信号,由此提出了利用多尺度模糊熵进行损伤识别。在现阶段,根据文献可知多尺度熵这一方法最早用于医学信号,之后被用于齿轮、轴承等基于振动的损伤分类中,此类信号以及医学信号都属于高频、噪声多,鲜有用在主动健康监测这一方面,因此该方法在这个监测方向对于温度的鲁棒性之前还未有相关文献记载过。本发明将多尺度模糊熵用于主动监测中,并且在变温环境中实现了损伤的准确定位。
[0188]
本发明公开的基于多尺度模糊熵的损伤识别方法,是一种利用信号特征值进行rapid损伤成像的方法,本发明针对环境温度变化下的rapid损伤成像方法以及环境温度变化下基于lamb波的损伤识别中的难点,提供了一种在环境温度变化下基于多尺度模糊熵的损伤识别技术,具体提出了基于多尺度模糊熵的损伤因子计算方法,获得了对温度鲁棒性强且对损伤敏感度高的信号特征作为损伤因子,避免或减小了温度效应对损伤识别产生的干扰。多尺度熵是以尺度因子为自变量,模糊熵值为因变量的函数,通过各个尺度下的模糊熵值对信号数据进行分析。模糊熵可以衡量信号的复杂和混乱程度,因为lamb波遇到损伤会产生散射和反射,能量集中度会减小,因此信号的熵值会变大。基于此原理,本发明采用多尺度模糊熵识别损伤的方式,定义各路径信号的损伤因子进行损伤诊断,能准确得到结构的健康状态(有无损伤)以及损伤的位置,在环境温度变化下也能实现损伤的准确定位。
[0189]
图9为本发明基于多尺度模糊熵的损伤识别系统实施例的结构图。参见图9,该基于多尺度模糊熵的损伤识别系统包括:
[0190]
直达波信号获取模块901,用于获取采集信号的直达波信号和基准信号的直达波信号;采集信号为实时接收的待测结构的传感器信号;基准信号为待测结构在健康常温状态下接收的传感器信号。
[0191]
多尺度分析模块902,用于对采集信号的直达波信号和基准信号的直达波信号进行多尺度分析,得到各个尺度下的采集信号和各个尺度下的基准信号。
[0192]
该多尺度分析模块902具体包括:
[0193]
第一粗粒化处理单元,用于对采集信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的采集信号。
[0194]
第二粗粒化处理单元,用于对基准信号的直达波信号进行多时间尺度的粗粒化处理,得到各个尺度下的基准信号。
[0195]
模糊熵计算模块903,用于分别计算各个尺度下的采集信号的模糊熵和各个尺度下的基准信号的模糊熵;每一尺度下的采集信号的模糊熵与对应尺度下的基准信号的模糊
熵对应。
[0196]
该模糊熵计算模块903具体包括:
[0197]
第一转换单元,用于将各个尺度下的采集信号和各个尺度下的基准信号分别转换成m维向量空间中的向量。
[0198]
第一距离计算单元,用于计算m维向量空间中的两个向量的距离。
[0199]
第一相似程度得到单元,用于根据m维向量空间中的两个向量的距离,利用模糊隶属度函数得到m维向量空间中的两个向量之间的相似程度。
[0200]
第一相似概率得到单元,用于根据m维向量空间中的两个向量之间的相似程度得到m维向量空间中的任一向量与其余向量的相似概率。
[0201]
第一函数值得到单元,用于将所有相似概率相加除以m维向量空间中的向量的总数,得到第一函数值。
[0202]
第二转换单元,用于将各个尺度下的采集信号和各个尺度下的基准信号分别转换成m+1维向量空间中的向量。
[0203]
第二距离计算单元,用于计算m+1维向量空间中的两个向量的距离。
[0204]
第二相似程度得到单元,用于根据m+1维向量空间中的两个向量的距离,利用模糊隶属度函数得到m+1维向量空间中的两个向量之间的相似程度。
[0205]
第二相似概率得到单元,用于根据m+1维向量空间中的两个向量之间的相似程度得到m+1维向量空间中的任一向量与其余向量的相似概率。
[0206]
第二函数值得到单元,用于将所有相似概率相加除以m+1维向量空间中的向量的总数,得到第二函数值。
[0207]
模糊熵得到单元,用于根据第二函数值与第一函数值的比值得到各个尺度下的采集信号的模糊熵和各个尺度下的基准信号的模糊熵。
[0208]
模糊熵差值得到模块904,用于依次将每一尺度下的采集信号的模糊熵减去对应尺度下的基准信号的模糊熵,得到各个尺度模糊熵差值。
[0209]
各路径损伤因子得到模块905,用于将各个尺度模糊熵差值的平方和作为传感网络中每一条激励传感路径的损伤因子。
[0210]
损伤概率成像模块906,用于根据每一条激励传感路径的损伤因子,采用rapid损伤概率成像法得到损伤成像图。
[0211]
该损伤概率成像模块906具体包括:
[0212]
损伤因子值计算单元,用于计算传感网络中每一条激励传感路径上的损伤因子的值。
[0213]
离散坐标系建立单元,用于建立传感网络的离散坐标系;离散坐标系包括多个离散坐标点。
[0214]
损伤概率值计算单元,用于根据每一损伤因子的值得到每一条激励传感路径的每一离散坐标点的损伤概率值。
[0215]
叠加单元,用于叠加所有激励传感路径的离散坐标点的损伤概率值,将损伤概率值最大处确定为损伤缺陷处。
[0216]
损伤成像图得到单元,用于将每一离散坐标点的损伤概率值作为像素值建立强度图,并对强度图进行图像归一化处理,得到损伤成像图;损伤成像图用于确定待测结构有无
损伤以及损伤的位置。
[0217]
损伤及损伤位置确定模块907,用于根据损伤成像图确定待测结构有无损伤以及损伤的位置。
[0218]
进一步的,该基于多尺度模糊熵的损伤识别系统还包括:
[0219]
信号获取模块,用于获取采集信号和基准信号。
[0220]
直达波到达时间确定模块,用于根据激励信号的中心频率对采集信号和基准信号进行小波变换,确定直达波的到达时间。
[0221]
直达波信号截取模块,用于根据到达时间截取采集信号的直达波信号和基准信号的直达波信号。
[0222]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0223]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1