一种惯导周期性误差自主估计与预测方法与流程
中地球周期振荡项幅值a
′
21
,相位
10.而且,所述步骤2的具体实现方法为:
11.(1)通过构建一族三角形求解2套惯导各自北速误差中地球周期振荡幅值a
v1
、a
v2
,东速误差中地球周期振荡幅值a
′
v1
、a
′
v2
,纬度误差中地球周期振荡幅值a1、a2,经度误差中地球周期振荡项幅值a
′1、a
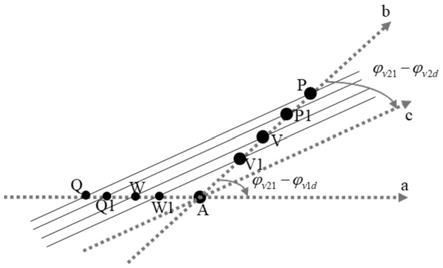
′2;构建一族三角形求解步骤:过点a作直线b,b绕a逆时针旋转度得到直线a,b绕a逆时针旋转得到直线c;在直线b上画出与a距离为a
v21
、a
′
v21
、a
21
、a
′
21
的点v、v1、p、p1,过v、v1、p、p1作c的平行线与a交于点 w、w1、q、q1,量取线段wa、wv、w1a、w1v1、qa、qp、q1a、q1p1长度即为a
v1
、a
v2
、a
′
v1
、a
′
v2
、a1、a2、a
′1、a
′2;
12.(2)按下式计算2套惯导纬度误差中地球周期振荡相位(2)按下式计算2套惯导纬度误差中地球周期振荡相位(2)按下式计算2套惯导纬度误差中地球周期振荡相位2套惯导纬度误差地球周期振荡项为:2套惯导纬度误差地球周期振荡项为:
13.(3)按下式计算2套惯导经度误差中地球周期振荡相位(3)按下式计算2套惯导经度误差中地球周期振荡相位(3)按下式计算2套惯导经度误差中地球周期振荡相位2套惯导经度误差地球周期振荡项为:2套惯导经度误差地球周期振荡项为:
14.而且,所述步骤3的具体实现方法为:
15.(1)根据2套惯导各自北速误差中地球周期振荡项预测未来t+δt时刻2套惯导纬度误差地球周期振荡项值分别为:
[0016][0017][0018]
(2)根据2套惯导各自东速误差中地球周期振荡项预测未来t+δt时刻2套惯导经度误差地球周期振荡项预测值分别为:
[0019][0020][0021]
其中
[0022]
本发明的优点和积极效果是:
[0023]
本发明基于观测的相位信息,从2套惯导位置、速度差值中分离出2套惯导各自位置、速度误差中地球周期振荡项,并通过构建一族三角形求解“将2套惯导北速、东速、纬度、经度差值中地球周期振荡项幅值分解为2套惯导各自北速、东速、纬度、经度误差中地球周期振荡幅值”的问题,大大简化了求解难度;利用速度的超前特性预测未来一段时间惯导经纬度误差的地球周期振荡项,其预测值可用于惯导位置输出的预先补偿,将显著提升惯导导航信息品质;本发明适用于深远海水下卫导拒止环境,以完全自主方式提升惯导长时导航精度。
附图说明
[0024]
图1为本发明的2套惯导北速、东速、纬度、经度差值地球周期振荡幅值分解为2套惯导各自北速、东速、纬度、经度误差中地球周期振荡幅值的示意图。
具体实施方式
[0025]
以下结合附图对本发明实施例做进一步详述。
[0026]
本发明是在由2套高精度惯导和多普勒声纳组成的水下自主导航系统上实现的。系统中的高精度惯导工作于阻尼状态,基于设备间的互观测信息估计和预测惯导经度、纬度误差中的地球周期振荡项。
[0027]
基于上述说明,本发明提出一种惯导周期性误差自主估计与预测方法,包括以下步骤:
[0028]
步骤1、以多普勒声纳北速为基准观测2套惯导北速误差,提取2套惯导北速误差中地球周期振荡项相位;观测2套惯导之间北速、东速差值,提取2套惯导北速、东速差值中地球周期振荡项幅值和相位;观测2套惯导之间纬度差值和经度差值,提取差值中地球周期振荡项幅值和相位。
[0029]
在本步骤中,设2套惯导北速为v1、v2,东速v
′1、v
′2,多普勒声纳北速为vd,以多普勒声纳北速为基准观测2套惯导北速误差e
v1d
=v
1-vd、e
v2d
=v
2-vd;2套惯导北速差值为 e
v21
=v
2-v1,东速差值为e
′
v21
=v
′
2-v
′1;读取e
v1d
、e
v2d
、e
v21
、e
′
v21
信号中距离当前时间最近的地球周期振荡峰值对应时间,分别记为t
1d
、t
2d
、t
21
、t
′
21
,则e
v1d
、e
v2d
、e
v21
、e
′
v21
中地球周期振荡项相位为:读取e
v21
、e
′
v21
中地球周期振荡项幅值a
v21
、a
′
v21
,t为地球周期。
[0030]
2套惯导纬度输出为lat1、lat2,提取2套惯导纬度差值elat
21
=lat
2-lat1中地球周期振荡项幅值记为a
21
,相位记为2套惯导经度输出为lon1、lon2,提取2套惯导经度差值 elon
21
=lon
2-lon1中地球周期振荡项幅值a
′
21
,相位
[0031]
步骤2、根据步骤1获得的相位信息将2套惯导北速、东速、纬度、经度差值中地球周期振荡项幅值分解,获得2套惯导各自北速、东速、纬度、经度误差中地球周期振荡项幅值;进一步获取2套惯导各自纬度、经度误差中地球周期振荡项相位,实现当前t时刻惯导纬度、经度误差中地球周期振荡项的估计。
[0032]
本步骤具体实现方法为:
[0033]
(1)通过构建一族三角形求解2套惯导各自北速误差中地球周期振荡幅值a
v1
、a
v2
,东速误差中地球周期振荡幅值a
′
v1
、a
′
v2
,纬度误差中地球周期振荡幅值a1、a2,经度误差中地球周期振荡项幅值a
′1、a
′2。构建一族三角形求解步骤:过点a作直线b,b绕a逆时针旋转度得到直线a,b绕a逆时针旋转得到直线c;在直线b上画出与a距离为a
v21
、a
′
v21
、a
21
、a
′
21
的点v、v1、p、p1,过v、v1、p、p1作c的平行线与a交于点 w、w1、q、q1,量取线段wa、wv、w1a、w1v1、qa、qp、q1a、q1p1长度即为a
v1
、a
v2
、a
′
v1
、a
′
v2
、a1、a2、a
′1、a
′2。构建一族三角形求解如图1所示。
[0034]
(2)按下式计算2套惯导纬度误差中地球周期振荡相位(2)按下式计算2套惯导纬度误差中地球周期振荡相位(2)按下式计算2套惯导纬度误差中地球周期振荡相位2套惯导纬度误差地球周期振荡项为:2套惯导纬度误差地球周期振荡项为:
[0035]
(3)按下式计算2套惯导经度误差中地球周期振荡相位(3)按下式计算2套惯导经度误差中地球周期振荡相位(3)按下式计算2套惯导经度误差中地球周期振荡相位2套惯导经度误差地球周期振荡项为:
[0036]
步骤3、根据惯导北速、东速误差中地球周期振荡项信息实现未来一段时间惯导纬度、经度误差中地球周期振荡项的预测。
[0037]
在本步骤具体实现方法为:
[0038]
(1)根据2套惯导各自北速误差中地球周期振荡项预测未来t+δt时刻2套惯导纬度误差地球周期振荡项值分别为:
[0039][0040][0041]
(2)根据2套惯导各自东速误差中地球周期振荡项预测未来t+δt时刻2套惯导经度误差地球周期振荡项预测值分别为:
[0042][0043][0044]
其中
[0045]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1