一种基于涡旋波片的偏振检测系统的误差校准方法及装置
1.本发明涉及光学技术领域,更具体地说,特别涉及一种基于涡旋波片的偏振检测系统的误差校准方法及装置。
背景技术:
2.偏振是电磁波的一个基本特性,偏振态的快速准确检测在偏振遥感、光纤通信、生物医学、光学薄膜检测等领域都具有重要应用。传统的偏振检测系统多采用时序调制型、分光型等方法实现光波偏振态的测量。时序调制型检测系统通过旋转光路中的偏振光学元件或在光路中引入电光调制器等对光波进行时序调制,测量并分析不同时刻下的光强,进而得到待测光波的斯托克斯参量,其一般需要外接驱动或调制器,系统体积较大、测量速度较慢且稳定性较差。分光型检测系统通过部分反射镜、光阑、分束器等将待测光分为多路,并分别对每路光信号进行调制与检测,进而解算出待测光波的偏振参量,分光型检测系统采用多通道同时测量的方法,有效提高了测量速度,但其系统结构复杂,且对各通道的空间配准要求比较高。为解决传统偏振检测系统存在的问题,发明人课题组在公开号为cn111579075a的专利中公开了一种基于傅里叶分析的光波偏振态快速检测方法,以及文献“spatially modulated polarimetry based on a vortex retarder and fourier analysis”(chinese optics letters,vol.19,issue 2,021201)中提出了一种基于空间调制与图像处理的偏振态检测方法,该方法无机械旋转运动部件,单次拍图分析便可实现偏振态检测,光路简单、操作便捷、稳定性好、测量速度快,且检测结果对波长变化不敏感。
3.基于空间调制与图像处理的偏振态检测方法的光路示意图如图1所示,其从左至右依次并排设置偏振态产生单元1、偏振态调制单元2与偏振图像处理单元3。偏振态产生单元包括光源101、起偏器102与四分之一波片103;偏振态调制单元包括零级涡旋半波片201、检偏器202;偏振图像处理单元包括相机301和计算机302。偏振态产生单元产生的特定偏振态的待测光波经偏振态调制单元调制后形成亮暗呈楔形分布的光强图像,偏振图像处理单元对光强调制图像进行采集并处理,得到待测光波的斯托克斯矢量。该偏振态检测系统的模型可描述为:
4.s
out
=a(θ4)
·
v(δ3,θ3)
·
q(δ2,θ2)
·
p(θ1)
·sin
5.上式中s
in
与s
out
分别表示由光源出射的光波与相机接收到光波的斯托克斯矢量;p、q、v与a分别表示起偏器、四分之一波片、零级涡旋半波片与检偏器的穆勒矩阵。为了产生特定偏振状态的待测光波并实现对待测光波偏振态的精确测量,通常要求上述偏振光学元件的方位角θ1至θ4设置在一定角度(其中θ3与θ4一般设置于0
°
),并保证四分之一波片的相位延迟δ2=π/2、涡旋半波片的相位延迟δ3=π,此外还要求相机的噪声保持在很低水平。
6.但在实际测量过程中,各个器件无法完美地调节至设定位置,总是存在一定的方位角误差;四分之一波片与涡旋半波片的相位延迟也无法严格地保证在理论值,总是存在一定的相位延迟误差;由于环境杂散光、相机工作温度升高、光电转换和信号读出等因素,相机采集到的图像必然包含一定的图像噪声。仿真研究与实验验证均已证明,上述误差因
素会对待测偏振光斯托克斯参量的测量结果产生较大影响,即使实验中已经对光学系统进行了十分精细的对准,并保证环境杂散光与相机温度保持在较低水平,斯托克斯参量的最大测量误差仍然达到了0.05,难以满足某些偏振相关领域对偏振态精确测量的要求。因此有必要设计一种基于涡旋波片的偏振检测系统的误差校准方法及装置。
技术实现要素:
7.本发明的目的在于提供一种基于涡旋波片的偏振检测系统的误差校准方法及装置,以克服现有技术所存在的缺陷。
8.为了达到上述目的,本发明采用的技术方案如下:
9.一种基于涡旋波片的偏振检测系统的误差校准方法,所述基于涡旋波片的偏振检测系统包括依次并排设置偏振态产生单元、偏振态调制单元和偏振图像处理单元,所述偏振态产生单元包括光源、起偏器和四分之一波片,所述偏振态调制单元包括零级涡旋半波片和检偏器,所述偏振图像处理单元包括相机和计算机,所述误差校准方法包括以下步骤:
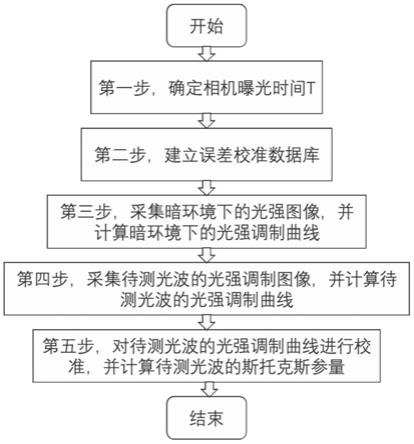
10.s1、调节所述起偏器的透光轴方位角θ1与四分之一波片的快轴方位角θ2以确定所述相机的曝光时间t;
11.s2、保持所述起偏器透光轴方位角θ1分别位于多个固定角度不变时,将所述四分之一波片的快轴方位角θ2按照预设规律变化以得到光强值随方位角变化的光强调制曲线,以所述光强调制曲线减去理论曲线得到光强调制曲线测量误差,并根据所述光强调制曲线测量误差建立误差校准数据库;
12.s3、采集暗环境下的光强图像,并计算暗环境下的光强调制曲线;
13.s4、采集待测光波的光强调制图像,并计算待测光波的光强调制曲线;
14.s5、将待测光波的光强调制曲线减去暗环境下的光强调制曲线和待测光波的光强调制曲线的误差,得到校准后的光强调制曲线,并对所述校准后的光强调制曲线进行傅里叶分析得到校准后的待测光波斯托克斯参量。
15.进一步地,所述步骤s1具体为:将所述起偏器的透光轴方位角θ1与四分之一波片的快轴方位角θ2调节至0
°
方向,观察所述相机采集的调制图像的光强最大值,并调节所述相机的曝光参数使所述相机采集的调制图像的光强最大值处饱和。
16.进一步地,所述步骤s2具体为:
17.将所述起偏器的透光轴方位角θ1调节至0
°
方向,将所述四分之一波片的快轴方位角θ2从0
°
每隔5
°
步进旋转至180
°
,对光强调制图像进行采集,得到所述起偏器处于0
°
,所述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
(i=1,2,3,
…
37)时的光强调制图像m(0
°
,0
°
)、m(0
°
,5
°
)、
…
m(0
°
,(i-1)
×5°
)
…
、m(0
°
,180
°
),对所述光强调制图像进行处理,得到光强值随方位角变化的光强调制曲线i
*
(0
°
,0
°
)、i
*
(0
°
,5
°
)、
…i*
(0
°
,(i-1)
×5°
)
…
、i
*
(0
°
,180
°
),将光强调制曲线减去所述偏振态检测系统的模型计算得到的理论曲线i(0
°
,0
°
)、i(0
°
,5
°
)、
…
i(0
°
,(i-1)
×5°
)
…
、i(0
°
,180
°
),得到所述起偏器处于0
°
、所述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(0
°
,0
°
)、δi(0
°
,5
°
)、
…
δi(0
°
,(i-1)
×5°
)、
…
δi(0
°
,180
°
);
18.再将起偏器的透光轴方位角θ1调节至45
°
方向,将所述四分之一波片的快轴方位角θ2从0
°
每隔5
°
步进旋转至180
°
,对光强调制图像进行采集,得到所述起偏器处于45
°
,所
述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
(i=1,2,3,
…
37)时的光强调制图像m(45
°
,0
°
)、m(45
°
,5
°
)、
…
m(45
°
,(i-1)
×5°
)
…
、m(45
°
,180
°
),对所述光强调制图像进行处理,得到光强值随方位角变化的光强调制曲线i
*
(45
°
,0
°
)、i
*
(45
°
,5
°
)、
…i*
(45
°
,(i-1)
×5°
)
…
、i
*
(45
°
,180
°
),将光强调制曲线减去所述偏振态检测系统的模型计算得到的理论曲线i(45
°
,0
°
)、i(45
°
,5
°
)、
…
i(45
°
,(i-1)
×5°
)
…
、i(45
°
,180
°
),得到所述起偏器处于45
°
、所述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(45
°
,0
°
)、δi(45
°
,5
°
)、
…
δi(45
°
,(i-1)
×5°
)
…
、δi(45
°
,180
°
);
19.根据所述起偏器处于0
°
、所述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差,以及根据所述起偏器处于45
°
、所述四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差建立误差校准数据库,可以将两者放在一个数据库里面实现建立。
20.进一步地,所述步骤s3具体为:关闭所述光源,保持所述相机的曝光参数不变,采集无待测光入射时的光强调制图像n,对所述光强调制图像n进行处理得到暗环境下的光强调制曲线n
*
。
21.进一步地,所述步骤s4具体为:
22.保持所述相机的曝光参数不变,调节所述起偏器的方位角至θ1,调节所述四分之一波片的方位角至θ2,以产生特定偏振状态的待测光,采集待测光生成的光强调制图像m(θ1,θ2),并对所述光强调制图像m(θ1,θ2)进行处理得到待测光波的光强调制曲线i
*
(θ1,θ2)。
23.进一步地,所述步骤s5具体包括以下步骤:
24.s51、计算所述四分之一波片方位角θ2除以5
°
的商k和余数r;
25.s52、判断所述余数r的大小,若0
°
≤r<2.5
°
,则待测光波的光强调制曲线的误差δi(θ1,θ2)由以下公式结合误差校准数据库得出:
26.δi(θ1,θ2)=cos2θ1×
δi(0
°
,k
×5°
)+sin2θ1×
δi(45
°
,k
×5°
)
27.若2.5
°
≤r<5
°
,则待测光波的光强调制曲线的误差δi(θ1,θ2)由以下公式结合误差校准数据库得出:
28.δi(θ1,θ2)=cos2θ1×
δi(0
°
,(k+1)
×5°
)+sin2θ1×
δi(45
°
,(k+1)
×5°
)
29.s53、根据以下公式将待测光波的光强调制曲线i
*
(θ1,θ2)减去暗环境下的光强调制曲线n
*
与待测光波的光强调制曲线的误差δi(θ1,θ2)得到校准后的光强调制曲线:
30.i(θ1,θ2)=i
*
(θ1,θ2)-n
*-δi(θ1,θ2)
31.s54、对校准后的光强调制曲线i(θ1,θ2)进行傅里叶分析,得到校准后的待测光波斯托克斯参量。
32.本发明还提供一种根据上述基于涡旋波片的偏振检测系统的误差校准方法的系统,包括:
33.曝光时间确定模块,用于根据所述起偏器的透光轴方位角θ1与四分之一波片的快轴方位角θ2以确定所述相机的曝光时间t;
34.误差校准数据库建模模块,用于在所述起偏器透光轴方位角θ1分别位于多个固定角度不变时,将所述四分之一波片的快轴方位角θ2按照预设规律变化以得到光强值随方位角变化的光强调制曲线,所述光强调制曲线减去理论曲线得到光强调制曲线测量误差,并
根据所述光强调制曲线测量误差建立误差校准数据库;
35.第一采集计算模块,用于采集暗环境下的光强图像,并计算暗环境下的光强调制曲线;
36.第二采集计算模块,用于采集待测光波的光强调制图像,并计算待测光波的光强调制曲线;
37.校准分析模块,用于将待测光波的光强调制曲线减去暗环境下的光强调制曲线和待测光波的光强调制曲线的误差,得到校准后的光强调制曲线,并对所述校准后的光强调制曲线进行傅里叶分析得到校准后的待测光波斯托克斯参量。
38.与现有技术相比,本发明的优点在于:本发明通过对起偏器在几个固定角度时的光强调制曲线误差进行测量并以此建立误差校准数据库,利用误差校准数据库即可实现对任意待测光波斯托克斯参量的校准,本发明能够有效降低光学元件方位角误差、相位延迟误差与图像噪声等误差因素的影响,显著提高待测光波斯托克斯参量的测量精度。
附图说明
39.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
40.图1是现有技术中基于空间调制与图像处理的偏振态检测方法的光路示意图。
41.图2是本发明基于涡旋波片的偏振检测系统的误差校准方法的流程图。
42.图3为起偏器方位角处于0
°
,四分之一波片方位角处于30
°
时的光强调制图像m(0
°
,30
°
)。
43.图4为起偏器方位角处于0
°
,四分之一波片方位角处于30
°
时的光强调制曲线i
*
(0
°
,30
°
)。
44.图5为起偏器方位角处于0
°
,四分之一波片方位角处于30
°
时的光强调制曲线测量误差图δi(0
°
,30
°
)。
45.图6中a与b分别为暗环境下采集的光强图像n与暗环境下的光强调制曲线n
*
。
46.图7中a与b分别为起偏器方位角处于20
°
,四分之一波片方位角处于30
°
时的光强调制图像m(20
°
,30
°
)与其光强调制曲线i
*
(20
°
,30
°
),c为根据误差校准数据库计算得到的光强调制曲线i
*
(20
°
,30
°
)的测量误差δi(20
°
,30
°
),d为对光强调制曲线i
*
(20
°
,30
°
)校准后得到的光强调制曲线i(20
°
,30
°
)。
47.图8中a与b分别为对31组连续变化偏振态斯托克斯参量s0、s1、s2的直接测量结果与使用本发明提供的误差校准方案校准后的结果图。
48.图9中a与b分别为31组连续变化偏振态斯托克斯参量s0、s1、s2直接测量的误差与使用本发明提供的误差校准方案校准后的误差图。
49.图10为本发明基于涡旋波片的偏振检测系统的误差校准系统的原理图。
具体实施方式
50.下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能
更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
51.参阅图1和图2所示,本实施例公开了一种基于涡旋波片的偏振检测系统的误差校准方法,其中,基于涡旋波片的偏振检测系统包括依次并排设置偏振态产生单元1、偏振态调制单元2和偏振图像处理单元3,所述偏振态产生单元1包括光源101、起偏器102和四分之一波片103,所述偏振态调制单元2包括零级涡旋半波片201和检偏器202,所述偏振图像处理单元3包括相机301和计算机302,所述误差校准方法包括以下步骤:
52.步骤s1、调节所述起偏器102的透光轴方位角θ1与四分之一波片103的快轴方位角θ2以确定所述相机301的曝光时间t。
53.具体的,是将偏振态产生单元1的起偏器102的透光轴方位角θ1与四分之一波片103的快轴方位角θ2调节至0
°
方向,观察相机301采集的调制图像的光强最大值,并调节相机301的曝光参数使相机301采集的调制图像的光强最大值处饱和。
54.步骤s2、保持起偏器102透光轴方位角θ1分别位于多个固定角度不变时,将四分之一波片103的快轴方位角θ2按照预设规律变化以得到光强值随方位角变化的光强调制曲线,以光强调制曲线减去理论曲线得到光强调制曲线测量误差,并根据光强调制曲线测量误差建立误差校准数据库。
55.具体的,步骤s2具体包括以下步骤:
56.步骤s20、将起偏器102的透光轴方位角θ1调节至0
°
方向,将四分之一波片103的快轴方位角θ2从0
°
每隔5
°
步进旋转至180
°
,对光强调制图像进行采集,得到起偏器102处于0
°
,四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
(i=1,2,3,
…
37)时的光强调制图像m(0
°
,0
°
)、m(0
°
,5
°
)、
…
m(0
°
,(i-1)
×5°
)
…
、m(0
°
,180
°
),对光强调制图像进行处理,得到光强值随方位角变化的光强调制曲线i9(0
°
,0
°
)、i
*
(0
°
,5
°
)、
…i*
(0
°
,(i-1)
×5°
)
…
、i
*
(0
°
,180
°
),将光强调制曲线减去所述偏振态检测系统的模型(即背景技术中所提到的模型公式)计算得到的理论曲线i(0
°
,0
°
)、i(0
°
,5
°
)、..
·
i(0
°
,(i-1)
×5°
)
…
、i(0
°
,180
°
),得到起偏器102处于0
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(0
°
,0
°
)、δi(0
°
,5
°
)、
…
δi(0
°
,(i-1)
×5°
)、
…
δi(0
°
,180
°
)。
57.步骤s21、再将起偏器102的透光轴方位角θ1调节至45
°
方向,将四分之一波片103的快轴方位角θ2从0
°
每隔5
°
步进旋转至180
°
,对光强调制图像进行采集,得到起偏器102处于45
°
,四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
(i=1,2,3,
…
37)时的光强调制图像m(45
°
,0
°
)、m(45
°
,5
°
)、
…
m(45
°
,(i-1)
×5°
)
…
、m(45
°
,180
°
),对光强调制图像进行处理,得到光强值随方位角变化的光强调制曲线i
*
(45
°
,0
°
)、i
*
(45
°
,5
°
)、
…i*
(45
°
,(i-1)
×5°
)
…
、i
*
(45
°
,180
°
),将光强调制曲线减去偏振态检测系统的模型(即背景技术中所提到的模型公式)计算得到的理论曲线i(45
°
,0
°
)、i(45
°
,5
°
)、
…
i(45
°
,(i-1)
×5°
)
…
、i(45
°
,180
°
),得到起偏器102处于45
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(45
°
,0
°
)、δi(45
°
,5
°
)、
…
δi(45
°
,(i-1)
×5°
)
…
、δi(45
°
,180
°
);
58.步骤s22、根据起偏器102处于0
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差,以及根据起偏器102处于45
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差建立误差校准数据库。
59.步骤s3、采集暗环境下的光强图像,并计算暗环境下的光强调制曲线。
60.具体的,关闭光源101,保持相机曝光参数不变,采集无待测光入射时的光强图像
n,对光强调制图像n进行处理得到暗环境下的光强调制曲线n
*
。
61.步骤s4、采集待测光波的光强调制图像,并计算待测光波的光强调制曲线。
62.具体的,保持相机曝光参数不变,调节起偏器102的方位角至θ1,四分之一波片103的方位角至θ2以产生特定偏振状态的待测光,采集待测光生成的光强调制图像m(θ1,θ2),并对光强调制图像m(θ1,θ2)进行处理得到待测光波的光强调制曲线i
*
(θ1,θ2)。
63.步骤s5、将待测光波的光强调制曲线减去暗环境下的光强调制曲线和待测光波的光强调制曲线的误差,得到校准后的光强调制曲线,并对所述校准后的光强调制曲线进行傅里叶分析得到校准后的待测光波斯托克斯参量。
64.具体的,步骤s5包括以下步骤:
65.步骤s51、计算所述四分之一波片方位角θ2除以5
°
的商k和余数r;
66.步骤s52、判断所述余数r的大小,若0
°
≤r<2.5
°
,则待测光波的光强调制曲线的误差δi(θ1,θ2)由以下公式结合误差校准数据库得出:
67.δi(θ1,θ2)=cos2θ1×
δi(0
°
,k
×5°
)+sin2θ1×
δi(45
°
,k
×5°
)
68.若2.5
°
≤r<5
°
,则待测光波的光强调制曲线的误差δi(θ1,θ2)由以下公式结合误差校准数据库得出:
69.δi(θ1,θ2)=cos2θ1×
δi(0
°
,(k+1)
×5°
)+sin2θ1×
δi(45
°
,(k+1)
×5°
)
70.步骤s53、根据以下公式将待测光波的光强调制曲线i
*
(θ1,θ2)减去暗环境下的光强调制曲线n
*
与待测光波的光强调制曲线的误差δi(θ1,θ2)得到校准后的光强调制曲线:
71.i(θ1,θ2)=i
*
(θ1,θ2)-n
*-δi(θ1,θ2)
72.步骤s54、对校准后的光强调制曲线i(θ1,θ2)进行傅里叶分析,得到校准后的待测光波斯托克斯参量。
73.结合图10所示,本发明还提供一种根据上述基于涡旋波片的偏振检测系统的误差校准方法的系统,包括:曝光时间确定模块10,用于根据所述起偏器102的透光轴方位角θ1与四分之一波片103的快轴方位角θ2以确定所述相机301的曝光时间t;误差校准数据库建模模块20,用于在所述起偏器102透光轴方位角θ1分别位于多个固定角度不变时,将所述四分之一波片103的快轴方位角θ2按照预设规律变化以得到光强值随方位角变化的光强调制曲线,所述光强调制曲线减去理论曲线得到光强调制曲线测量误差,并根据所述光强调制曲线测量误差建立误差校准数据库;第一采集计算模块30,用于采集暗环境下的光强图像,并计算暗环境下的光强调制曲线;第二采集计算模块40,用于采集待测光波的光强调制图像,并计算待测光波的光强调制曲线;校准分析模块50,用于将待测光波的光强调制曲线减去暗环境下的光强调制曲线和待测光波的光强调制曲线的误差,得到校准后的光强调制曲线,并对所述校准后的光强调制曲线进行傅里叶分析得到校准后的待测光波斯托克斯参量。
74.为检验本发明的实际校准效果,依据图1所示的结构系统搭建了基于涡旋波片的偏振态检测系统的实验光路。具体实施例中使用的主要设备型号说明如下:偏振态检测系统所用的光源101为出射波长633nm的平行光管,起偏器102与检偏器202为thorlabs(索雷博)公司生产的lpvise100-a型偏振片,四分之一波片103为thorlabs(索雷博)公司生产的wpq10e-633型波片,涡旋波片201为thorlabs(索雷博)公司生产的wpv10l-633型零级涡旋半波片,相机301为鑫图光电(tucsen)的dhyana95型科学级cmos相机。
75.调节起偏器102及四分之一波片103的方位角至0
°
,调整相机101的曝光时间t至17.914ms使得产生的调制图像的光强最大值恰好达到饱和。保持起偏器102方位角不变,控制四分之一波片103方位角从0
°
每隔5
°
步进旋转至180
°
,同时对光强调制图像进行采集,得到起偏器102处于0
°
、四分之一波片103处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
(i=1,2,3,
…
37)时的光强调制图像m(0
°
,0
°
)、m(0
°
,5
°
)、
…
m(0
°
,(i-1)
×5°
)
…
、m(0
°
,180
°
),图3为起偏器102方位角处于0
°
,四分之一波片103方位角处于30
°
时的光强调制图像m(0
°
,30
°
)。对上述37幅图像进行处理,得到光强值随方位角变化的光强调制曲线i
*
(0
°
,0
°
)、i
*
(0
°
,5
°
)、..
·i*
(0
°
,(i-1)
×5°
)、..
·i*
(0
°
,180
°
),图4为起偏器102方位角处于0
°
、四分之一波片103方位角处于30
°
时的光强调制曲线i
*
(0
°
,30
°
)。用测得的光强调制曲线减去其所对应的理论曲线,得到起偏器102处于0
°
、四分之一波片103处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(0
°
,0
°
)、δi(0
°
,5
°
)、
…
δi(0
°
,(i-1)
×5°
)
…
、δi(0
°
,180
°
),图5为起偏器102方位角处于0
°
、四分之一波片103方位角处于30
°
时的光强调制曲线测量误差δi(0
°
,30
°
)。将起偏器102方位角调节至45
°
方向,利用相同的方法得到起偏器102处于45
°
、四分之一波片103处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差δi(45
°
,0
°
)、δi(45
°
,5
°
)
…
δi(45
°
,(i-1)
×5°
)
…
δi(45
°
,180
°
)。根据起偏器102处于0
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差,以及根据起偏器102处于45
°
、四分之一波片处于0
°
、5
°
、
…
(i-1)
×5°…
、180
°
时的光强调制曲线测量误差建立误差校准数据库。
76.关闭光源101,对暗环境下的光强图像进行采集,采集的图像n如图6-a所示,对光强调制图像n进行处理得到待测光波的光强调制曲线n
*
如图6-b所示。
77.打开光源101,将偏振态产生单元1中的起偏器102方位角调节至20
°
,四分之一波片103方位角调节至30
°
,以产生特定偏振态的待测光波,经计算其斯托克斯参量的标准值s0=1.0000,s1=0.4698,s2=0.8138。该待测偏振光经过偏振态调制单元1后形成亮暗呈楔形分布的光强图像,利用相机301对光强调制图像进行采集,采集的光强图像m(20
°
,30
°
)如图7-a所示,对图7-a中的光强调制图像进行处理,得到待测光波的光强调制曲线i
*
(20
°
,30
°
)如图7-b所示。
78.四分之一波片103方位角θ2=20
°
,计算θ2/5
°
得商k=4,余数r=0,由下列公式及误差校准数据库计算得到待测光波的光强调制曲线的误差δi(θ1,θ2)为:
79.δi(20
°
,30
°
)=cos40
°×
δi(0
°
,30
°
)+sin40
°×
δi(45
°
,30
°
)
80.根据上述公式计算得到的待测光波的光强调制曲线的误差结果如图7-c所示。用待测光波的光强调制曲线i
*
(20
°
,30
°
)减去暗环境下的光强调制曲线n
*
与上述公式计算得到的待测光波的光强调制曲线误差δi(20
°
,30
°
),得到校准后的光强调制曲线i(20
°
,30
°
)如图7-d所示。对图7-d中的校准后的光强调制曲线进行傅里叶分析,得到待测光波的斯托克斯参量为s0=0.9933,s1=0.4679,s2=0.8119,与标准值的最大误差不超过0.0067。若不利用本发明对待测光波的偏振态进行校准,则直接计算的结果为s0=1.0103,s1=0.4308,s2=0.7813,与标准值相比,最大测量误差达到了0.0390。通过对比斯托克斯参量校准前后的测量误差可知,本发明所能够有有效提高待测光波斯托克斯参量的测量精度。
81.为进一步验证本发明的有效性,采用本发明所提供的技术方案对不同偏振态光波的斯托克斯参量进行了校准。实验中将起偏器102的方位角设置在60
°
、四分之一波片103从
0到180
°
每隔6
°
连续步进,一共产生31组偏振态连续变化的光波,并连续采集待测光波经过偏振调制单元后的图像。直接对31幅光强调制图像进行处理,得到的测量结果如图8-a所示;利用本发明所提供的误差校准方法对待测光波的斯托克斯参量进行校准,得到的校准结果如图8-b所示。图9-a与图9-b分别为校准前后斯托克斯参量s0、s1、s2的测量误差。由图8和图9可知,采用本发明所提供的误差校准方法,斯托克斯参量s0、s1和s2的测量误差最大值由0.0101、0.0382和0.0414降为0.0056、0.0088和0.0083。由以上实施例可知:本发明提供的误差校准方法有效降低了光学元件方位角误差、相位延迟误差与图像噪声等误差因素的影响,该方法将斯托克斯参量的测量精度由5%以内提高至1%以内。
82.本发明通过对起偏器在几个固定角度时的光强调制曲线误差进行测量并以此建立误差校准数据库,利用误差校准数据库即可实现对任意待测光波斯托克斯参量的校准,本发明能够有效降低光学元件方位角误差、相位延迟误差与图像噪声等误差因素的影响,显著提高待测光波斯托克斯参量的测量精度。
83.虽然结合附图描述了本发明的实施方式,但是专利所有者可以在所附权利要求的范围之内做出各种变形或修改,只要不超过本发明的权利要求所描述的保护范围,都应当在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1