一种基于集成多光谱对水污染进行检测的测验机构的制作方法
1.本发明涉及污水检测技术领域,具体为一种基于集成多光谱对水污染进行检测的测验机构。
背景技术:
2.河道污染是指未经处理的工业废水、生活污水、农田排水以及其他有害物质直接或间接进入河流,超过河流的自净能力,引起水质恶化和生物群落变化的现象。随着经济的发展和城市化进程的推进,城市河道周边的企业和居民比较密集,生活和建筑垃圾逐渐渐染河道。
3.由于绝大部分化学物质都具有红外吸收光谱特征,采用外红光谱分析探测化学物质具有甄别能力强,灵敏度高等有点。因此现阶段的检测装置均采用集成多光谱方式来进行分析。
4.现有的河道污染监测设备在对河道进行监测时,监测较为广泛,无法对污染源进行起到追溯的作用,使得相关环保人员无法快速对污染源进行处理,降低了通过河道污染监测设备对河道生态环境进行保护的效果,减小了对污染源进行追溯与处理的效率,增加了环保人员的劳动强度,降低了河道污染监测设备使用过程中的便捷性。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种基于集成多光谱对水污染进行检测的测验机构,解决了上述背景技术中提出的问题。
7.(二)技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:一种基于集成多光谱对水污染进行检测的测验机构,包括船体,所述船体两侧对称设有侧翼,船体底部中央处连接有转轴,转轴底部连接有球体,所述侧翼后端连接有推进组件,球体内部开设有上下两腔室,所述下腔室内设有污水检测模块,污水检模块连接有多个探头,探头延伸至球体外。
9.污水检测模块检测河道化学成分,并控制整个船体逐渐朝污染严重区域靠近。
10.优选的,所述转轴下端伸入球体上腔室内,转轴底部连接有上齿轮,球体上腔室内设有电机,电机传动轴连接有下齿轮,电机位于上齿轮正下方,电机两侧对称设有电推杆,电推杆顶端枢接有小齿轮,小齿轮位于上齿轮和电机之间,所述小齿轮分别与上齿轮、电机啮合。
11.优选的,所述电机传动轴连接有伸缩杆,伸缩杆竖直向上,伸缩杆顶端与下齿轮底部连接,所述电机传动轴外套有弹簧,弹簧始终处于受挤压状态,令下齿轮始终受到向上升起的力,所述下齿轮与上齿轮之间连接有六条弹性橡胶条,六条弹性橡胶条绕轴线等角度分布。
12.优选的,所述推进组件包括套筒、扇叶、接收器和无线模块,套筒与侧翼后端连接,
扇叶枢接在套筒内,扇叶由马达驱动,套筒内壁开设有滑槽,接收器滑动配合在滑槽内,接收器与扇叶抵触,接收器背面与无线模块连接,侧翼后端连接有激光发射器,接收器做圆周运动过程经过激光发射器射出的光线路径。
13.优选的,所述船体顶部设有气泵,气泵连接有进气管,侧翼连接有y型电子阀,y型电子阀汇总端与气泵之间连接有出气管,y型电子阀其中一个分支连接有喷枪一,y型电子阀另一个分支连接有喷枪二,所述喷枪一水平布置在推进组件上方,所述喷枪二呈倾斜状布置在推进组件下方。
14.优选的,所述船体顶部连接有信号杆,信号杆伸出水面,进气管沿信号杆长度方向布置。
15.优选的,所述球体背面连接有导向鳍,导向鳍用于改变船体移动方向。
16.(三)有益效果
17.本发明提供了一种基于集成多光谱对水污染进行检测的测验机构。具备以下有益效果:
18.1、该基于集成多光谱对水污染进行检测的测验机构,利用电机带动下齿轮旋转,下齿轮通过小齿轮带动上齿轮旋转,从而令船体发生偏转。再通过电推杆与弹性橡胶条配合,当电推杆收缩小齿轮远离上齿轮,弹性橡胶条带动球体回正。通过接收器与激光发射器配合,来判断用于前进的扇叶是否能够正常过程,再借助气泵与喷枪配合,在扇叶被河道中水草、垃圾卡住情况下,辅助船体移动。
附图说明
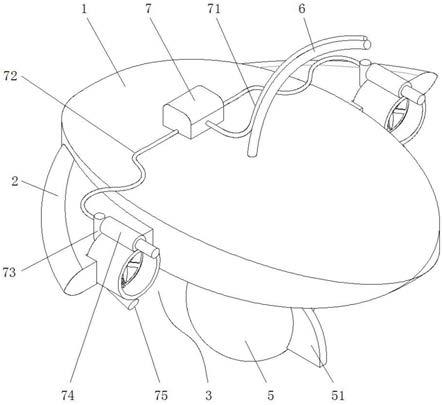
19.图1为本发明结构立体图;
20.图2为本发明结构俯视图;
21.图3为本发明结构侧视图;
22.图4为本发明球体结构剖视图;
23.图5为本发明球体结构内部展示图;
24.图6为本发明推进组件结构示意图。
25.图中:1船体、2侧翼、3推进组件、31套筒、32扇叶、33接收器、34无线模块、4转轴、41上齿轮、5球体、51导向鳍、6信号杆、7气泵、71进气管、72出气管、73y型电子阀、74喷枪一、75喷枪二、8激光发射器、9电机、91下齿轮、92伸缩杆、93弹簧、10电推杆、11小齿轮、12弹性橡胶条、13探头。
具体实施方式
26.本发明实施例提供一种基于集成多光谱对水污染进行检测的测验机构,如图1-6所示,包括船体1,船体1两侧对称固定安装有侧翼2,船体1底部中央处焊接有转轴4。转轴4底部枢接有球体5,侧翼2后端固定安装有推进组件3。球体5内部开设有上下两腔室。下腔室内固定安装有污水检测模块。污水检模块连接有多个探头13,探头13延伸至球体5外。
27.通过将整个装置放置在河道中,接着装置沉入水中。污水检测模块与背景技术中采用的方式技术相似,因此不做详细描述。污水检测模块检测河道水中的化学成分,并将得到信息反馈给电脑终端。接着推进组件3驱动船体1缓慢前行,船体1底部球体5转动慢慢调
整船体1前行方向。使得整个装置逐渐朝污染严重区域靠近。
28.转轴4下端伸入球体5上腔室内。转轴4底部焊接有上齿轮41,球体5上腔室内固定安装有电机9。电机9传动轴焊接有下齿轮91,电机9位于上齿轮41正下方。电机9两侧对称设有电推杆10,电推杆10下端与上腔室内壁底部焊接。电推杆10顶端枢接有小齿轮11,小齿轮11位于上齿轮41和电机9之间,小齿轮11分别与上齿轮41、电机9啮合。
29.电机9传动轴焊接有伸缩杆92,伸缩杆92竖直向上,伸缩杆92顶端与下齿轮91底部焊接。电机9传动轴外套有弹簧93,弹簧93始终处于受挤压状态,令下齿轮91始终受到向上升起的力。下齿轮91与上齿轮41之间固定安装有六条弹性橡胶条12,六条弹性橡胶条12绕轴线等角度分布。
30.初始状态,电推杆10伸长使得小齿轮11与上齿轮41接触。工作时,电机9带动下齿轮91转动,下齿轮91通过小齿轮11带动上齿轮41旋转,从而驱动船体1发生偏转。此过程中,橡胶弹性条12扭转拉伸。然后电推杆10收缩,小齿轮11远离上齿轮41。由于橡胶弹性条12受到拉伸而收缩,拉动球体5旋转回正。
31.推进组件3包括套筒31、扇叶32、接收器33和无线模块34。套筒31与侧翼2后端焊接,扇叶32枢接在套筒31内,扇叶32由马达驱动。套筒31内壁开设有滑槽,接收器33滑动配合在滑槽内,接收器33与扇叶32抵触。当扇叶32旋转时带动接收器33沿套筒31内壁移动。
32.接收器33背面与无线模块34固定安装在一起。侧翼2后端固定安装有激光发射器8。接收器33与激光发射器8对齐,接收器33做圆周运动时经过激光发射器8射出的光线路径。
33.上述扇叶32旋转速度较慢,当接收器33与激光发射器8对齐后,射出的激光射线照射在接收器33上。通过无线模块34将信号传输给电脑终端。当扇叶32转动但接收器33无法接收到信号,则表示扇叶32被河道中的垃圾或者水草卡住,整个推进组件无法正常工作。
34.船体1顶部固定安装气泵7,气泵7固定安装有进气管71,侧翼2固定安装有y型电子阀73。y型电子阀73汇总端与气泵7之间固定安装有出气管72。y型电子阀73其中一个分支固定安装有喷枪一74,y型电子阀73另一个分支固定安装有喷枪二75。喷枪一74水平布置在推进组件3上方,喷枪二75呈倾斜状布置在推进组件3下方。
35.当扇叶32无法正常工作时,通过气泵抽取外界空气,在由喷枪一74喷出,从而在水中产生前进的推力。喷枪一74与喷枪二75单独工作,喷枪一74用于辅助船体1前行,空气从喷枪二75喷出,使得船体1浮出水面。方便人捞起整个装置。
36.船体1顶部固定安装有信号杆6,信号杆6伸出水面。进气管71沿信号杆6长度方向布置。因此进气管71同样伸出水面。
37.球体5背面固定安装有导向鳍51,导向鳍51用于改变船体1移动方向。
38.综上所述,该基于集成多光谱对水污染进行检测的测验机构,利用电机9带动下齿轮91旋转,下齿轮91通过小齿轮11带动上齿轮41旋转,从而令船体1发生偏转。再通过电推杆10与弹性橡胶条12配合,当电推杆10收缩小齿轮11远离上齿轮41,弹性橡胶条12带动球体5回正。通过接收器33与激光发射器8配合,来判断用于前进的扇叶32是否能够正常过程,再借助气泵7与喷枪配合,在扇叶32被河道中水草、垃圾卡住情况下,辅助船体1移动。
39.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1