1.本发明涉及的是一种微型机器人领域的技术,具体是一种胃肠道微型机器人运动力学测试系统。
背景技术:2.微型机器人在胃肠道中的驻留力,即机器人能够定点驻留在胃肠道某处所要克服肠道蠕动、自身重量等因素产生的沿肠道轴向的力,其对机器人稳定驻留、降低漏检率具有重要意义。而目前,仍然缺乏针对胃肠道微型机器人这两项运动力学性能的精确测试系统及方法,这严重制约着胃肠道微型机器人的设计与研发工作。
技术实现要素:3.本发明针对目前无法简单、高效且精确地测量微型机器人在测试管道中的运动阻力与驻留力这两项关键的运动力学性能数据的技术问题,提出一种胃肠道微型机器人运动力学测试系统,采用的滑轮与线绳组成的样件导向装置,减小了机器人运动过程中产生的扰动误差,提高了测试精度;采用的固定装置,具有结构简单、运行可靠、测试精度高的优点。
4.本发明是通过以下技术方案实现的:
5.本发明涉及一种胃肠道微型机器人运动力学测试系统,包括:胃肠环境模拟机构、拉力测试机构和运动导向机构,其中:待测微型机器人测试样件设置于胃肠环境模拟机构内并分别与拉力测试机构和运动导向机构相连,通过运动导向机构产生与待测微型机器人测试样件运动方向相反的阻力,通过拉力测试机构测试待测微型机器人测试样件在胃肠环境模拟机构内的驻留力。
6.所述的胃肠环境模拟机构包括:测试管道及其固定装置,其中:空心结构的测试管道的两端通过固定装置实现固定。
7.所述的运动导向机构包括:第一线绳、第二线绳、两对滑轮、两对滑轮固定柱,其中:两对滑轮分别设置于对应的两对滑轮固定柱上,第一线绳一端与拉力测试机构的测力计的探头相连,另一端与机器人测试样件相连,第二线绳绕于滑轮之上,且其两端分别与待测微型机器人测试样件两端相连。
8.所述的拉力测试机构包括:直线驱动装置、测力计和数据存储模块,其中:测力计设置于直线驱动装置上并与待测微型机器人测试样件相连,将检测到的力传感数据输出至数据存储模块进行驻留力计算。
9.本发明涉及一种基于上述系统的胃肠道微型机器人驻留力检测方法,通过拉力测试机构检测待测微型机器人空载状态下的运动力学测量值作为标定值,再将其置于胃肠环境模拟机构中,测得的运动力学测量值与标定值相减,即为胃肠道微型机器人驻留力。
10.所述的空载状态是指:保持第一线绳、第二线绳保持紧绷状态,在此状态下,测力计计数置零;待测微型机器人置于无管道状态下,通过测力计实时测得的运动力学测量值
f0。
11.所述的驻留力为机器人测试样件扩张状态和低速驱动(一般为1mm/s以下)情况下测量值的最大值。技术效果
12.本发明通过简单的线绳与滚轮结构既为胃肠道微型机器人的运动提供了导向功能,结合相关计算又减小了扰动误差,保证了测量的精度。
附图说明
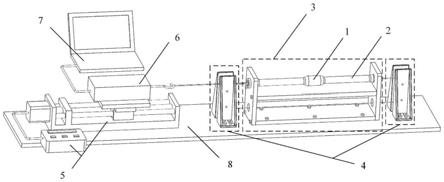
13.图1为本发明整体结构图;
14.图2为管道固定装置与运动导向机构;
15.图3为运动导向机构中的线绳运动示意图;
16.图4为直线驱动装置结构图;
17.图中:1微型机器人测试样件、2测试管道、3固定装置、301管道固定塞、302侧板、303顶板、304底板、4运动导向机构、401第一线绳、402第二线绳、403滑轮、404滑轮固定柱、5直线驱动装置、501螺母、502测力计固定板、503丝杆、504导杆、505步进电机、506电机控制器、507底座、6测力计、7数据存储模块、8系统基座。
具体实施方式
18.如图1所示,为本实施例涉及一种胃肠道微型机器人运动力学测试系统,包括:胃肠环境模拟机构、拉力测试机构和运动导向机构,其中:待测微型机器人测试样件1设置于胃肠环境模拟机构内并分别与拉力测试机构和运动导向机构相连,通过运动导向机构产生与待测微型机器人测试样件1运动方向相反的阻力,通过拉力测试机构测试待测微型机器人测试样件1在胃肠环境模拟机构内的驻留力。
19.所述的胃肠环境模拟机构包括:测试管道2及其固定装置3,其中:空心结构的测试管道2的两端通过固定装置3实现固定。
20.如图2所示,所述的固定装置3包括:一对管道固定塞301、一对侧板302、顶板303和底板304,其中:一对管道固定塞301与对应的一对侧板302上的圆孔同轴配合从而夹紧测试管道2的两端,一对侧板302分别与顶板303、底板304的两端相固定,底板304与系统基座8相固定。
21.如图2所示,所述的运动导向机构4包括:第一线绳401、第二线绳402、两对滑轮403、两对滑轮固定柱404,其中:两对滑轮403分别设置于对应的两对滑轮固定柱404上,第一线绳401一端与拉力测试机构的测力计6的探头相连,另一端与机器人测试样件1相连,第二线绳402绕于滑轮403之上,且其两端分别与待测微型机器人测试样件1两端相连。
22.如图3所示,所述的第一线绳401、第二线绳402皆保持紧绷状态,从而使得机器人测试样件1保持运动方向稳定性,减小测量误差;当测力计6通过第一线绳401拉动机器人测试样件1向左运动时,第二线绳402绕滑轮403逆时针运动,滑轮的作用在于导向和减小摩擦阻力。
23.所述的拉力测试机构包括:直线驱动装置5、测力计6和数据存储模块7,其中:测力计6设置于直线驱动装置5上并与待测微型机器人测试样件1相连,将检测到的力传感数据
输出至数据存储模块7进行驻留力计算。
24.所述的数据存储模块7包括:存储单元和数据处理单元,其中:存储单元采集测力计6的实时数据,并进行储存,数据处理单元剔除失真数据,并根据所要测量的运动力学性能指标,对数据进行取平均值或者最大值处理。
25.如图4所示,所述的直线驱动装置5包括:螺母501、测力计固定板502、丝杆503、导杆504、步进电机505、电机控制器506和底座507,其中:螺母501与丝杆503组成丝杆螺母副,步进电机505与丝杆503相连,电机控制器506与步进电机505之间电气连接,测力计6与测力计固定板502相固定,测力计固定板502与螺母501相固定,丝杆503、导杆504以及步进电机505设置于底座507上,电机控制器506控制步进电机505旋转,通过丝杆螺母副,将步进电机505旋转运动转化为直线运动,从而使得与测力计固定板502固定的测力计6作直线运动。
26.本实施例涉及一种基于上述系统的胃肠道微型机器人驻留力检测方法,包括以下步骤:
27.步骤1)测试开始时,保持第一线绳401、第二线绳402保持紧绷状态,在此状态下,测力计6计数置零;
28.步骤2)将机器人测试样件1置于无管道状态下,控制驱动装置5带动测力计6拉动机器人测试样件1以设置的值作直线匀速运动,同时测力计6将实时测得的运动力学数据传输到数据存储模块中进行处理,得到空载下运动力学测量值f0;
29.步骤3)将机器人测试样件1置于测试管道2中,重复上述测试步骤,得到在测试管道中运动力学测量值f1;
30.步骤4)最终得到机器人测试样件1在测试管道2中实际运动力学值为f=f
1-f0;
31.步骤5)本系统测量的运动力学值包括运动阻力与驻留力,运动阻力为机器人测试样件完全收缩状态下测量值的平均值,驻留力为机器人测试样件扩张状态和低速驱动(一般为1mm/s以下)情况下测量值的最大值。
32.经过具体实际实验,在离体的猪小肠(内径约为18mm)作为测试管道的环境下,利用此系统测试了4种不同直径(24,26,28,30mm)的测试样件的驻留力(驱动速度为0.8mm/s),并与理论值进行了对比:直径/mm理论值/n实验值/n误差240.8260.91711.02%261.7081.8407.73%283.3303.5466.49%306.2016.5966.37%
33.从上表数据可看出,当测试样件直径为24mm时的驻留力较小,导致实验值与理论值误差相对较大,为11.02%,其他直径(26,28,30mm)下的误差皆小于10%,验证了此测试系统具有较高的精度。
34.与现有技术相比,本装置通过模块化设计以及简单的设计,简化了测试流程,提高了测试效率,由滑轮和线绳组成的运动导向机构则较大地提高了测试精度。
35.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。