大气成分超光谱移动测量系统的制作方法
1.本发明属于空气环境质量监测技术领域,具体涉及一种环境空气质量的移动自动测量系统。
背景技术:
2.环境空气中的大气污染成分主要包括二氧化硫、二氧化氮、臭氧、一氧化氮和氨气等。对环境空气中大气污染成分的自动监测方式主要分为定点测量和移动测量两种方式。在定点监测工作方式下,监测设备一般安装在具有空调系统的站房内,在抽气泵的作用下,室外空气通过采样管进入室内,然后再被各监测设备抽取,分别进行检测分析。在移动工作方式下,监测设备通常会被安装在机动车内,利用车辆的运行进行移动监测,移动测量时,由于仪器是安装在车内,因此,也需要一根简易的采样管,设备通过采样管采集外界空气进行分析。利用采样管采样的测量系统最大弊端是样气在采样管路里的损耗,特别是在空气相对湿度比较大的天气情况下,由于室内外的温度差,采样管内壁水汽的凝结对于水溶性较强的气体,比如氨气,会产生很大的影响。另外,由于采样管存在,使得室外空气要经过一定的时间才能进入分析设备,因此,设备的响应时间也会受到影响。利用采样管采样的设备,都必须配置大功率的抽气泵持续不断的抽取外界空气供设备测量使用,增加了测量环境的噪声。
3.在开放光路下基于光谱分析技术的监测设备,比如长程差分光学吸收光谱仪(lp-doas),在工作时不需要进行采样,利用光束在穿越大气时被大气成分吸收的原理实现对大气污染成分的测量。这类设备由于需要很长的测量光路(一般几十米到几百米的距离),因此,他们的光源发射端和接收端都需要稳定固定在室外,或发射端固定在室外,接收端固定在室内通过观察窗口进行观测。另外,有一种便携式的基于光谱分析技术的大气污染测量设备,利用了一个较小的样品池,让测量光路穿过样品池实现对样品池内气体的测量,这种设备可以进行移动测量,但前提还是需要将外界空气通过采样管路抽进样品池才能实现测量。
4.通过上述分析发现,现有的环境空气自动监测设备,无论是固定测量还是移动测量,一般都需要采样管先采样,然后再分析。对于lp-doas设备,尽管不需要采样,但是,由于发射端和接收端之间距离太远,无法实现移动测量。
技术实现要素:
5.本发明目的在于克服现有技术中的不足,提供一种利用移动工作平台,在车辆(或其他移动平台)前行过程中、利用自然进气方法,在不需要抽气采样的情况下实现移动测量的环境空气质量自动测量系统。
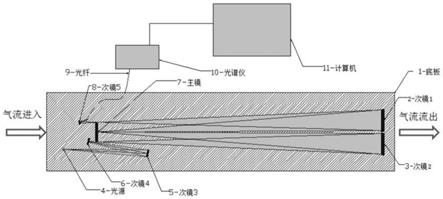
6.本发明提供的移动测量环境空气质量自动测量系统,是一种大气成分超光谱移动测量系统,是基于光谱分析技术的自动监测设备,其结构如图1所示,主要包括由光源和一组反射镜组成的测量光路系统,以及由光谱仪和计算机组成的检测分析系统;所述测量光
路系统包括光源、主镜和5个次镜,均安装在一水平底板上;其中,主镜设置于光路的一端(即进气端,例如左端),以水平主轴为基准,主镜分为左半面和右半面两部分;第三次镜、第四次镜和第五次镜设置于测量光路的主镜一端,其中,光源、第三次镜设置于主镜端主轴左侧(图1中显示为下侧)位置,第四次镜设置于主镜端主轴左侧、且在主镜左边位置,第五次镜设置于主镜端主轴右侧(图1中显示为上侧)、且在主镜左边位置;第三次镜和第四次镜,以及第五次镜具有水平和俯仰方向的微调旋钮;第三次镜、第五次镜和主镜为凹面球面反射镜,第四次镜为平面反射镜;光纤的一端位于第五次镜的焦点位置,另一端与光谱仪的入射狭缝相连;第一次镜和第二次镜在测量光路的另一端(即出气端,例如右端),第一次镜和第二次镜同样具有微调功能,第一次镜和第二次镜为凹面球面反射镜;第一次镜、第二次镜和主镜具有相同的焦距,第一次镜和第二次镜平行放置,对称分布在主镜的主轴左右两侧,并且与主镜之间的距离为他们焦距的2倍。
7.本发明中测量光路系统的光路如下:光源发出的光首先照射到第三次镜上,被第三次镜反射后再经第四次镜反射,汇聚在主镜的前表面侧边外(即主镜的下半面),然后再继续向前传播照射到另一端的第二次镜上,第二次镜将照射到的光反射汇聚后,聚焦在主镜表面上,主镜再将光线反射照射到第一次镜上,光线经第一次镜反射后聚焦在主镜前表面另一侧边外(即主镜的上半面),并再继续向前传播照射到第五次镜上,最后经第五次镜反射后聚焦在光纤的入射端,再经光纤传播照射到光谱仪的入射狭缝,经光谱仪分光探测后,光谱信号经usb线传输到计算机上进行分析和存储。
8.本发明中,可通过调节第一次镜2和第二次镜3的微调旋钮控制第一次镜2和第二次镜3的反射角度,从而改变光线在主镜与第一次镜和第二次镜之间的反射次数,则相应的测量光程也会增加或减少。
9.以上所有的反射镜以及光源和光纤的入射端部分都固定在底板上组成测量光路系统,并构成一个独立的腔室,腔室前后两端不封闭,以便空气在腔室内流通;光谱仪和设备的电源组成一个腔室并列在测量光路腔室的旁边,实际测量时,系统被固定安装在车辆的车顶行李架上;计算机放置在车辆内,与光谱仪之间通过usb线连接。
10.本发明的测量光路单元是一个半封闭的腔室,空气可以前后流通,利用车辆的前行运动,空气自然进入测量光路腔室,并流经测量光路实现对空气中的大气污染成分进行测量,本发明的特点是在移动工作状态下,无需抽气采样即可完成测量工作,与现有技术相比较省去了主动采样部分。
附图说明
11.图1为本发明系统原理框图(俯视图)。
12.图2为系统工作过程中的安装示意图。
13.图3是在上海市区的一次测量结果展示。
14.图中标号:1为底板,2为第一次镜,3为第二次镜,4为光源,5为第三次镜,6为第四次镜,7为主镜,8为第五次镜,9为光纤,10为光谱仪,11为计算机。
具体实施方式
15.本发明提供的大气成分超光谱移动测量系统,其原理图如图1所示,主要包括由光源和一组反射镜组成的测量光路系统,以及由光谱仪和计算机组成的检测分析系统;其中,测量光路系统包括光源4、主镜7和5个次镜;主镜7设置于光路的一端(左端),以水平主轴为基准,主镜分为左半面和右半面;第三次镜5、第四次镜6和第五次镜8设置于测量光路的主镜7一端,其中,光源4、第三次镜5设置于主镜7端主轴左侧(图1中显示为下侧)位置,第四次镜6设置于主镜7端主轴左侧、且在主镜左边位置,第五次镜8设置于主镜7端主轴右侧(图1中显示为上侧)、且在主镜左边位置;第三次镜5和第四次镜6,以及第五次镜8具有水平和俯仰方向的微调旋钮;第三次镜5、第五次镜8和主镜7为凹面球面反射镜,第四次镜6为平面反射镜;光纤的一端位于第五次镜的焦点位置,另一端与光谱仪的入射狭缝相连;第一次镜和第二次镜在测量光路的另一端(右端),第一次镜2和第二次镜3同样具有微调功能,第一次镜2和第二次镜3为凹面球面反射镜;第一次镜2、第二次镜3和主镜7具有相同的焦距,第一次镜2和第二次镜3平行放置,对称分布在主镜7的主轴左右两边,并且与主镜7之间的距离为他们焦距的2倍。
16.系统安装调试完毕通电后,光源4发出的光首先照射到第三次镜5上,被第三次镜5反射后再经第四次镜6反射,汇聚在主镜7的前表面侧边外(图1中主镜的下面),然后再继续向前传播照射到第二次镜3上,第二次镜3将照射到的光反射汇聚后,聚焦在主镜7表面上,主镜7再将光线反射照射到第一次镜2上,光线经第一次镜2反射后聚焦在主镜前表面另一侧边外(图1中主镜的上面),并再继续向前传播照射到第五次镜8上,最后经第五次镜8反射后聚焦在光纤9的入射端,再经光纤9传播照射到光谱仪10的入射狭缝,经光谱仪分光探测后,光谱信号经usb线传输到计算机11上进行分析计算和存储。
17.本发明中,计算机得到的光谱信号主要包括按波长分布的光强信号,由于空气通过测量光路系统时,空气中的待测污染物会对光源发出的光进行选择性的吸收,在测量光谱中留下相应的吸收信号,通过对测量光谱进行滤波处理等,可以获得只包含待测物质的吸收光谱信息(吸收光谱),然后利用待测物质的标准吸收光谱与测量到的吸收光谱进行线性拟合,即可定量计算出待测物质的浓度。这种分析计算属于常规方法。
18.实际测量时,可设定1分钟完成一次光谱采集和分析计算(光谱仪实际每次采集光谱的时间远小于1分钟,可将1分钟内光谱仪采集的所有光谱进行叠加平均,然后作为一条光谱输出),这时的分析结果可以看作是车辆在这1分钟时间内运行路径上待测气体浓度的平均值。通过第一次镜2和第二次镜3的微调旋钮调节,可以控制第一次镜2和第二次镜3的反射角度,从而可以改变光线在主镜7与第一次镜2和第二次镜3之间的反射次数,则相应的测量光程也会增加或减少,实际工作时可将反射次数控制在20次左右。
19.设备开机预热一段时间后(一般5分钟即可),可移动车辆开始巡航观测,由于车辆以一定的速度行驶,因此,空气气流可以从测量光路腔室的前面进入,穿越主镜7和第一次镜2、第二次镜3之间的测量光路区域后,从腔室的后面流出。这种设计方案利用了车辆运行时空气气流的相对流动实现进样测量,可以称为“自然进气”,无需采样管、抽气泵等部件抽气进样,实现了真正意义上的“原位在线”测量。
20.图3是在上海市区的一次测量结果展示。图中的圆点代表每次测量的位置点,这些点构成的轨迹就是走航观测的车行路线,圆点的颜色代表测量浓度值,图中红色代表浓度高,最大值设定为100ppb,蓝色代表浓度低,最小值设定为0。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1