一种用于汽车开发测试使用的车轮速度发生装置的制作方法
1.本发明涉及汽车工程试验领域,特别涉及一种用于汽车开发测试使用的车轮速度发生装置。
背景技术:
2.乘用车底盘出现了越来越多的机电联合控制的模块,比如制动的abs/esp,转向eps,空气悬架,cdc等等。而这些部件在开发的过程中不可避免的要进行测试,整车测试虽然比较能直观的反应产品性能,但普遍存在成本高、周期大的问题。所以实验室的硬件在环越来越多的被用来代替实车测试。而在底盘部件ecu硬件在环测试中,车轮速度通常都是不可缺少的,而常规的做法是设计一个由电机驱动的装置,将轮速传感器以及齿圈放置其中通过纯硬件方式产生轮速脉冲,这种方案存在设备笨重,不易移动,另外轮速的调整也不够精确。本技术基于这样的现状设计一种低成本可靠的车轮速度发生装置。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种用于汽车开发测试使用的车轮速度发生装置,用于电路模拟的方式来产生轮速信号的电流脉冲。
4.为了实现上述目的,本发明采用的技术方案为:一种用于汽车开发测试使用的车轮速度发生装置,包括单片机、光耦继电器,所述单片机的i/o口与光耦继电器的负极连接,光耦继电器的正极接入电源;光耦继电器的集电极与电源连接,光耦继电器的发射极输出轮速电流脉冲信号,其经过信号线连接至轮速需求端;所述单片机输出pwm脉冲信号控制光耦继电器的导通频率,进而实现光耦继电器的发射极输出,用于表征车速的轮速的电流脉冲信号。
5.所述光耦继电器的集电极与12v电源连接;所述光耦继电器的正极连接5v电源。
6.所述光耦继电器的发射极和信号线之间串接设置电阻r2,电阻r1的一端连接至光耦继电器集电极,另一端连接至光耦继电器发射极和需求端之间的线路上。
7.所述光耦继电器的个数为四个,用于分别输出四路表征轮速的电流脉冲信号,每个光耦继电器的正极对应单片机的一个i/o口,从而通过单片机控制4路光耦继电器输出4个电流脉冲信号至需求端。
8.将四个光耦继电器集成在一起形成光耦模块,其中光耦模块引出每个光耦继电器的集电极端子、发射极端子、电源正极端子、电压负极端子。
9.所述发生装置还包括上位机,所述上位机用于发送速度请求控制指令,所述单片机根据接收到的速度请求控制指令输出速度请求对应的pwm信号来控制光耦继电器的导通闭合,从而在光耦继电器的发射端输出用于表征速度信号的电流脉冲信号。
10.上位机发送的速度请求控制指令为速度请求字符串,字符串包括标志位、数据位、校验位,单片机接收到字符串信号后校验解析出速度请求并输出与速度请求相对应的频率变化的pwm波形信号来驱动光耦继电器的导通与否从而形成与同频率的轮速脉冲信号。
11.所述单片机根据上位机发来的四个车轮速度请求控制指令后分别通过不同的i/o口来控制光耦继电器来输出四个表征四个车轮速度的电流脉冲信号。
12.本发明的优点在于:采用电路硬件结构来实现脉冲电流信号从而实现了电流信号的产生,可以方便快速的为车辆测试提供车速信号,满足车辆的测试需求;而且本技术的电路结构简单,成本低,可以做到快速准确的实现轮速信号的输出,且可控;输出的电流脉冲信号与采用电机、轮速传感器等现有技术输出的信号相比,准确的和可靠性都能够得到保证;模拟的速度可以根据上位机来实现设置,从而实现可调的目的。
附图说明
13.下面对本发明说明书各幅附图表达的内容及图中的标记作简要说明:
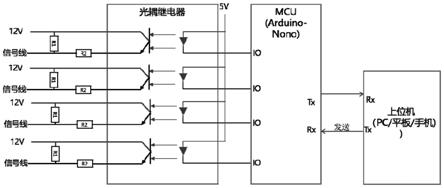
14.图1为本发明电路原理示意图;
15.图2为本发明电流脉冲输出信号波形图。
具体实施方式
16.下面对照附图,通过对最优实施例的描述,对本发明的具体实施方式作进一步详细的说明。
17.现有技术中常规的做法是设计一个由电机驱动的装置,将轮速传感器以及齿圈放置其中通过纯硬件方式产生轮速脉冲,电机驱动装置通过齿轮驱动方式带动齿轮转动而轮速传感器就采集电机带动的轮速从而来表征实际行车中的车速,一般轮速传感器属于双线电流脉冲型传感器,电源线给输入12v的电压,信号线反馈7ma或14ma的电流信号,当车轮静止时,轮速信号没有脉冲输出,此时信号线的电流是7ma,当车轮运动时,有轮速信号的脉冲发出,信号线的电流为14ma,这种电流脉冲的变化频率反映了车轮运动的快慢,需求端通过读取轮速传感器的信号线的电流脉冲信号的频率来判断车轮转速。基于现有技术的车轮速度传感器的原理设计一种可以不需要实际转动而输出轮速脉冲信号的装置,具体方案如下:
18.一种用于汽车开发测试使用的车轮速度发生装置,包括单片机、光耦继电器,单片机的i/o口与光耦继电器的负极连接,光耦继电器的正极接入电源;光耦继电器的集电极与电源连接,光耦继电器的发射极输出轮速电流脉冲信号,其经过信号线连接至轮速需求端,需求端一般为测试实验的一些控制器ecu或其它需要轮速的设备;单片机输出pwm脉冲信号控制光耦继电器的导通频率进而实现光耦继电器的发射极输出用于表征车速的轮速的电流脉冲信号。因为光耦导通与否会造成集电极电源是否可以通过发射极导通后输出电流至需求端,因此通过光耦导通与否的控制就可以控制光耦发射端输出的电流脉冲信号。
19.因为测试所需的电流脉冲信号的电流值是一定的,比如现有技术传感器输出的电流值为7ma和14ma两种状态,因此为了保证本技术的在光耦输出端的电流与一般传感器的输出电流脉冲相同或类似,本技术设置的电源电压和电阻r1、r2。
20.其中光耦继电器的集电极与12v电源连接;光耦继电器的正极连接5v电源。
21.光耦继电器的发射极和信号线之间串接设置电阻r2,电阻r1的一端连接至光耦继电器集电极,另一端连接至光耦继电器发射极和需求端之间的线路上。电阻r1的一端连接至光耦的集电极,另一端无论连接在电阻r2和发射极之间还是电阻r2和需求端之间,均可
以实现在光耦导通与否情况下的电流的经信号线输出值需求端的不同。本技术以电阻r1的另一端连接在电阻r2和需求端之间信号线上为例进行说明:当单片机输出控制光耦继电器导通时,电阻r1、r2是并联的,电流为为电压12v除以并联后的r1、r2的总电阻;当光耦不导通时,r2是断开的,电阻就仅有r1接入,则电流为12v除以r1的阻值,因此可以通过电阻不同设置来实现脉冲电流信号的脉冲数值的大小,从而满足现有技术中的电流输出的要求。
22.光耦继电器一般为四个,对应输出四个轮速表征的电流脉冲信号,因为测试车辆也需要四个轮子的数据,光耦继电器的个数为四个,用于分别输出四路表征轮速的电流脉冲信号,每个光耦继电器的正极对应单片机的一个i/o口,从而通过单片机控制4路光耦继电器输出4个电流脉冲信号至需求端。将四个光耦继电器集成在一起形成光耦模块,其中光耦模块引出每个光耦继电器的集电极端子、发射极端子、电源正极端子、电压负极端子,这种集成式的可以采用tlp521-4芯片来实现。单片机根据上位机发来的四个车轮速度请求控制指令后分别通过不同的i/o口来控制光耦继电器来输出四个表征四个车轮速度的电流脉冲信号。
23.在一个优选的实施例中,发生装置还包括上位机,上位机用于发送速度请求控制指令,单片机根据接收到的速度请求控制指令输出速度请求对应的pwm信号来控制光耦继电器的导通闭合,从而在光耦继电器的发射端输出用于表征速度信号的电流脉冲信号。上位机发送的速度请求控制指令为速度请求字符串,字符串包括标志位、数据位、校验位,单片机接收到字符串信号后校验解析出速度请求并输出与速度请求相对应的频率变化的pwm波形信号来驱动光耦继电器的导通与否从而形成与同频率的轮速脉冲信号。
24.本发明专利根据轮速传感器的工作原理,设计了一种轮速信号的发生装置,如图1所示,所用光耦继电器有四个独立通道,每个通道有四个端口,分别是正极(+)、负极(-)、集电极(c)、发射级(e),负极与单片机(arduino-nano)的4个i/o口单独连接,正极与5v连接
25.光耦继电器的集电极与12v电源连接,光耦继电器的发射极与轮速需求端的信号线连接,电源线与信号线之间并联定值电阻r1,耦继电器的发射极信号线之间串联定值电阻r2
26.当单片机的i/o口输出高电平时,光耦继电器处于隔离状态,轮速回路中只有定值电阻r1串联在电源线与信号线之间,r2并不参与。
27.当单片机的i/o口输出低电平时,光耦继电器的正负极之间导通,使得光三极管的集电极和发射极导通,轮速回路中,r1与r2并联在电源线与信号线之间。
28.因为电源线的输出电压是固定的,通过设定定值电阻r1与定值电阻r2的电阻值,信号线就可以得到预期的电流值。r1与r2并联,阻值小于r1所以输出14ma,当只有r1串联其中时输出电流7ma.
29.上位机通过串口给单片机(arduino-nano)发送速度请求字符串(标志位+数据位+校验位),arduino-nano收到请求之后校验解析出速度请求,并改变程序定时器初值,这样从i/o口输出的pwm周期就会变化,对应的车速也就变化了。
30.本发明专利中选用的单片机是arduino-nano,较常用的51系列,该单片机功能更强,体积更小,标准i/o,串口,ad都非常丰富,有自己的ide采用c语言编程,语句更加简单明了。
31.在此使用了单片机的4个独立i/o口,通过定时器输出50占空比的pwm波,光耦继电
器选用的是四通道的tlp521-4。
32.电阻r1/r2阻值均为1714欧,因为r1单独串联时,需要输出7ma电流,r1=12v/7ma=1714ω,r1/r2并联是需要输出14ma,可以求得1/(1/r1+1/r2)=12v/14ma=857ω.r1已知,可计算出r2同样为1714欧姆。
33.如图2所示是轮速信号线输出的电流脉冲值,根据图1设计的电路图,在单片机的i/o口输出按照一定频率变化的pwm波形,轮速的信号线可以获得按照相同频率变化的轮速脉冲信号。当上位机通过串口发送了速度请求字符串,arduino-nano收到单片机信号后将速度信息解析成单片机定时器初值,改变定时器定时周期t就改变了i/o口的pwm周期,进而将上位机的速度请求,转化为光耦继电器的电流周期。
34.显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1