一种毫米波雷达点云分堆方法与流程
1.本发明涉及毫米波雷达应用领域,具体涉及一种毫米波雷达点云分堆方法。
背景技术:
2.目前用于室内人员检测与跟踪的传感器除了毫米波雷达以外,还包括超声、被动红外、主动红外(激光雷达、tof)和光学摄像头等传感器,但是这些传感器容易受外部环境(如光照、温度等)影响,造成虚警的出现。相比之下,毫米波雷达具备全天候的特性,在环境稳健性方面比其他传感器优异很多,能够满足室内人员检测在准确性、稳定性等方面的要求,因此毫米波雷达被越来越多的应用在安防监控、智能家居、智慧养老和自动门控制等领域。尤其在涉及到保护个人隐私生活等方面,毫米波雷达更有不可替代的天然优势。
3.毫米波雷达在应用中一个基本的要求就是能够准确识别区域内目标的个数,并进行目标跟踪与统计。目前毫米波雷达在人员跟踪计数方面,已有方式是针对目标点迹,将点迹凝聚为不同区域,将凝聚好的点迹区域按条件匹配给已知航迹,区分出不同目标的运动轨迹,得到目标区域内的人员运动状态,更新目标区域内的计数结果。
4.现有技术中,将点迹凝聚的方式只考虑了点迹的距离信息和方位角信息,以二维平面对点迹根据八近邻方式进行凝聚分堆。如果考虑到人员目标的高度,同一目标的不同部位会形成不同的距离维点迹信息。因此,只以距离和方位角的二维信息对点迹进行凝聚分堆,在目标高度较高,离雷达较近的情况下,会产生较大误差,引起计数和跟踪的误报,准确度不够。
技术实现要素:
5.本发明所要解决的技术问题是:提出一种毫米波雷达点云分堆方法,较为准确地完成点云分堆,减小误差,从而提高后续人员检测与跟踪的准确性。
6.本发明解决上述技术问题采用的技术方案是:
7.一种毫米波雷达点云分堆方法,包括以下步骤:
8.s1、利用毫米波雷达对待测空间发射电磁波信号,对反射回来的信号进行信号处理,获得被测空间的动态点云信息数据,包括距离雷达的距离信息、雷达的方位角、雷达的俯仰角以及信噪比;
9.s2、以雷达为原点,根据距离雷达的距离信息、雷达的方位角、雷达的俯仰角信息,计算生成点云三维坐标系,然后根据信噪比的值,筛选出坐标系中动态点云的位置,采用三维坐标对动态点云的位置进行标记;
10.s3、根据点云三维坐标系,遍历动态点云进行分堆,并写入划分的堆号,直至完成所有点云的分堆。
11.作为进一步优化,步骤s1中,所述对反射回来的信号进行信号处理,获得被测空间的动态点云信息数据,具体包括:
12.对反射回来的信号进行傅里叶变换,在距离维度上根据恒虚警率算法提取目标距
离雷达的距离信息;
13.根据目标距离雷达的距离信息以及由天线阵列确定的方向导引矢量,先确定目标的方位角,然后根据恒虚警率算法提取出有效目标的角度,同时算出该目标的信噪比,然后再由方向导引矢量算出所提取出的目标的俯仰角;
14.根据目标距离雷达的距离、方位角和俯仰角,结合毫米波雷达的方位角分辨率、俯仰角分辨率和距离分辨率,计算得到待测空间的动态点云的三维信息数据。
15.作为进一步优化,步骤s2具体包括:
16.以雷达为原点,以距离信息range和俯仰角θ,根据公式range*cos(θ)计算出点云距离雷达的投影距离r;
17.再根据形成点云的方位角信息α,根据公式r*cos(α),生成点云x坐标,根据公式r*sin(α),生成点云的y坐标;假设雷达架设高度为h,根据公式h+sin(θ),生成点云的z坐标;
18.然后根据信噪比的值,筛选出坐标系中动态点云的位置,以x、y、z坐标在坐标系中对动态点云的位置进行标记。
19.作为进一步优化,步骤s3中,所述根据点云三维坐标系,遍历动态点云进行分堆,具体包括:在点云三维坐标系中,如果在当前点的x或y或z坐标上存在相邻点云,那么就把相邻的点和当前点划分为同一堆,以此标准,遍历所有点云,把点云划分成不同的堆。
20.作为进一步优化,步骤s3中,所述写入划分的堆号的方式包括:
21.在从第一个点遍历点云进行分堆时,所有分成一堆的点写入堆号0,当第一堆的所有点在x、y或z坐标都没有相邻点时,结束第一次分堆,从而开始第二次分堆,把第二次搜索的所有点写入堆号1,以此类推,直到所有的点云都没有相邻点时结束,则所有的点云都会被写入相应划分的堆号。
22.本发明的有益效果是:
23.在进行人员检测和跟踪前,通过距离,方位角和俯仰角的三维信息,对点云进行分堆,考虑的因素更全面,从而更加准确地进行点云分堆,减少伪影,在人员跟踪计数时能有效的提升目标识别与跟踪的准确率,减少误报。本发明能够适应诸如机场、会议室、走廊、特定保密场所等诸多场景。
附图说明
24.图1是本发明中的毫米波雷达点云分堆方法流程图。
具体实施方式
25.本发明旨在提出一种毫米波雷达点云分堆方法,较为准确地完成点云分堆,减小误差,从而提高后续人员检测与跟踪的准确性。其核心思想是:毫米波雷达通过发射调频连续波的特殊毫米波到空间中,电磁波信号被其发射路径上的物体阻挡继而会发生反射,雷达系统通过捕捉反射的信号,可以在三维空间形成密集的动态点云信号,通过提取点云的信息数据,使用点云相对雷达的距离、方位角、俯仰角对点云进行分堆,从而把点云和具体目标相关联,最终确定雷达测试空间的动态目标数量,完成目标的跟踪与检测。
26.在具体实现上,本发明中的毫米波雷达点云分堆方法流程如图1所示,包括以下步骤:
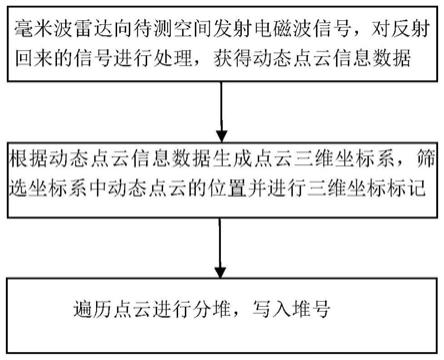
27.s1、毫米波雷达向待测空间发射电磁波信号,对反射回来的信号进行处理,获得动态点云信息数据:
28.本步骤中,利用毫米波雷达对待测空间发射电磁波信号,对反射回来的信号进行信号处理,获得被测空间的动态点云信息数据,包括距离雷达的距离信息、雷达的方位角、雷达的俯仰角以及信噪比;
29.s2、根据动态点云信息数据生成点云三维坐标系,筛选坐标系中动态点云的位置并进行三维坐标标记:
30.本步骤中,以雷达为原点,根据距离雷达的距离信息、雷达的方位角、雷达的俯仰角信息,计算生成点云三维坐标系,然后根据信噪比的值,筛选出坐标系中动态点云的位置,采用三维坐标对动态点云的位置进行标记;
31.s3、遍历点云进行分堆,写入堆号:
32.本步骤中,根据点云三维坐标系,遍历动态点云进行分堆,并写入划分的堆号,直至完成所有点云的分堆。
33.实施例:
34.本实施例中提出的毫米波雷达点云分堆方法的实现流程包括如下步骤:
35.步骤1、毫米波雷达对待测空间发射电磁波信号,对反射回来的信号进行信号处理,得到待测空间的动态点云的信息数据;
36.作为一种实施手段,对反射回来的信号进行信号处理包括:
37.对反射回来的信号进行傅里叶变换,在距离维度上根据恒虚警率算法提取目标距离雷达的距离信息;
38.根据目标距离雷达的距离信息,由天线阵列确定的方向导引矢量,先确定目标的方位角,然后根据恒虚警率算法提取出有效目标的角度,然后再由方向导引矢量算出所提取出的目标的俯仰角;
39.根据目标的距离、方位角和俯仰角,结合毫米波雷达的距离分辨率、方位角角度分辨率和俯仰角角度分辨率,得到待测空间的动态点云的信息数据。
40.为了便于后续使用,对反射回来的信号进行信号处理还可以包括:根据波束形成算法计算动态点云的参数,所述动态点云的参数至少包括动态点云的信噪比。
41.至此,本步骤获得的动态点云信息数据包括雷达的距离信息、雷达的方位角、俯仰角以及信噪比。
42.步骤2、根据动态点云信息数据生成点云三维坐标系,筛选坐标系中动态点云的位置并进行三维坐标标记;
43.作为一种实施手段,以雷达为原点,以距离信息range和俯仰角θ,根据公式range*cos(θ)计算出点云距离雷达的投影距离r,再根据形成点云的方位角信息α,根据公式r*cos(α),生成点云x坐标,根据公式r*sin(α),生成点云的y坐标。假设雷达架设高度为h,根据公式h+sin(θ),生成点云的z坐标。然后根据信噪比的值,筛选出坐标系中动态点云的位置,以x、y、z坐标对动态点云位置进行标记;具体的,我们使用x、y、z坐标遍历所有的点云,给所有点云赋值一个初始堆号512。
44.步骤3、根据坐标系,对动态点云进行遍历,把相邻点和当前点分为一堆,并写入划分的堆号,直至完成所有点云的分堆;
45.作为一种实施手段,从原点开始遍历,依次进行相邻点(与当前点在x坐标或y坐标或z坐标上的距离小于阈值,即二者靠近)的堆号进行判断,如果有一个位置为512,则修改这个点云的堆号,从而化为一堆,并把这个位置的点云压栈,继续搜索压栈点云的相邻位置,重复以上操作,直到当前点的相邻点的堆号都不是512(表示当前堆的点云已经搜索完毕);当搜索到最后一个点时,进行出栈操作。此时,在每个点云的数据中,根据计算出来的堆号信息,已经写入分好的堆号。
46.堆号可以从0开始,依次递增排序,即,第一堆点云的堆号为0,第二堆点云的堆号为1,第三堆点云的堆号为2...以此类推;当完成一堆点云的划分后,紧接着,堆号加1,重新从坐标原点搜索,找到第一个堆号为512的点(堆号为512表示该点尚未被分堆),上述分堆操作,就会完成第2堆点的划分,依次类推,当所有的点云堆号都不是512时,表示所有点云的分堆完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1