一种非对称的强粘易撕传感器及制备方法
1.本发明涉及柔性传感器技术领域,尤其是涉及一种非对称的强粘易撕传感器及制备方法。
背景技术:
2.可控的粘附对于柔性电子器件、生物制药等领域至关重要,不仅是保证器件功能性的重要条件,同时还与材料或器件的精密定位、吸附、分离、转移等过程息息相关。传统传感器的粘附一般是压力驱动的,虽然反应灵敏、性能强劲,但粘性单一,要么粘性强难撕脱,要么粘性弱易脱落,要想实现自如的粘附和分离尤为困难,并且一旦脱离表面就很难再次使用,重复率很低。此外,一些传感器为了获得强力的粘附,通常采用粘性较大的粘接剂,使得分离器件变得困难,还可能在表面残留胶剂,难以去除并影响使用。可见,粘性和分离性很难协调,如果能同时实现良好粘性还易于分离,这对提高生产效益具有重要的意义。
3.尽管人们通过设计形态各异的微观结构探索了粘性调控的途径,譬如由壁虎等启发的仿生机械爪和纤维阵列等,然而由于尺寸精密、结构复杂、脆弱易损,使用成本很高。而将粘附界面进行图案化的设计逐渐得到关注,它一般通过在特定区域改变材料属性或界面性能,从而调控粘附。这种方法常应用于传感器或厚度较小的材料,如晶圆、印刷电路板等的制造和转运中,然而现有的图案化技术难以同时具备强粘附和易分离的性能。
技术实现要素:
4.本发明针对现有技术不足,提供了一种非对称的强粘易撕传感器及制备方法。
5.为实现上述目的,本发明采用了以下技术方案:一种非对称的强粘易撕传感器,包括依次连接的传感器基材、胶层和离型纸;所述传感器基材表面开有功能性切口;所述功能性切口为沿剥离方向轴对称的切割线,并完全贯穿传感器基材,功能性切口的末端开有止裂孔;所述功能性切口内布置有图案化的电极,所述图案化的电极粘贴在传感器基材的表面,所述图案化的电极引脚处与导线连接;所述功能性切口的图案优选镂空型、虚线型或非对称虚线型。
6.进一步地,所述传感器基材优选pic水凝胶、pet或pdms柔性薄膜。
7.进一步地,所述电极的材料优选银纳米线、金、铜、ito或pedot:pss。
8.进一步地,所述胶层优选丙烯酸胶层。
9.进一步地,传感器基材的厚度为0.1~0.5mm;所述强粘易撕传感器的总厚不高于3mm;功能性切口的缝隙宽度应小于0.2mm,止裂孔的直径为0.5~3mm;功能性切口的总宽和传感器基材的宽度应大于1:4;电极的厚度应大于0.01mm,电极的线宽不应低于0.3mm。
10.本发明公开了一种非对称的强粘易撕传感器的制备方法,包括以下步骤:步骤(1):使用柔性薄膜制备传感器基材,在该柔性薄膜底部粘胶层,在胶层的底部粘贴离型纸作为保护层;步骤(2):通过激光切割或冲裁工艺形成粘附调控的功能性切口,用工业酒精清理
传感器基材的表面,并用40~100w功率进行等离子处理2~5min,提高水凝胶表面活性;步骤(3):将将绘有电极图案的金属掩膜贴附于步骤(1)制得的传感器基材的表面;步骤(4):将电极材料采用旋涂、蚀刻、蒸镀或磁控溅射滴入金属掩膜的图案空隙中,静置待溶剂挥发,去除金属掩膜,并在电极引脚处粘贴铜箔引出导线,即得非对称的强粘易撕传感器。
11.本发明的有益效果为:(1)本发明公开的传感器具有良好的耐剥性和易剥性。沿相反的两方向撕开的粘性差异显著,且粘附力可控。直接改变切口的宽度可有效调整粘性,本发明还提供了若干设计实例以适应不同需求,提高了传感器的可设计性;本发明可通过调节传感器切口的宽度等尺寸和气孔结构来适应不同的粘性要求,正反两向的粘性差异显著,既实现了强粘性,也兼顾了易撕性。
12.(2)本发明公开的传感器为刺激响应的电阻式传感器,传感效果优良,可集成物体变形、物性改变、表面识别等多功能,应变传感范围广、映射关系明显,同时可适应大变形粘接的需要;本发明结合agnw和pic(聚离子复合物)水凝胶优异的力学和电学特性,能够对拉伸、重力、振动和温度等刺激下做出灵敏的响应,能够基于力和热等多模式的刺激形成稳定的电阻变化,具备良好的映射关系。
13.(3)本发明公开的传感器结构简单,加工方法简便,制作自由度大、门槛低,可应用于现有的生产设备,有效降低制作成本;由于传感器剥离的强度较小,可有效降低对胶带和物体表面的损伤,提高传感器的重复使用率,降低了使用成本。
14.(4)本发明适用范围广泛,通过设计传感器的切口图案,而不限制基底,从而保证传感器能广泛适用于皮肤、金属、塑料、玻璃等材质表面,且能适应所贴表面的形貌和大变形。
15.(5)本发明公开的传感器可实现与复杂表面的紧密贴附,切口既有助于形变又能减少对被粘物表面的损伤,进而提高传感器的使用寿命和重复利用率。
16.(6)当传感器材料为弹性布等可变形材质,通过切口设计,有助于传感器实现在大变形下的紧密贴附,同时能保证传感器的剥离的方向性,能够适应大变形和复杂曲面的表面粘接,既有助于透气又能减少对被粘物的损伤和减少撕除传感器对基底的损伤,能够改善在软基底表面粘贴传感器、胶带、膏药贴等医疗贴剂的粘贴效果。
附图说明
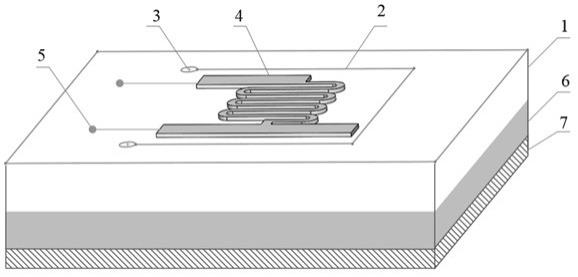
17.图1为本发明传感器的结构示意图;图2中的(a)为具有方形粘性功能区的传感器的受力示意图,图2中的(b)为具有方形粘性功能区的传感器沿正反两向90度剥离的对比图;图3中的(a)是虚线型切口的传感器贴附在人体关节的效果图,图3中的(b)是非对称虚线型切口的传感器贴附在人体关节的效果图;图4中的(a)是传感器功能区的结构示意图,图4中的(b)是粘性功能区不同宽度的剥离强度关系曲线;图5中的(a)是镂空型非对称粘性的传感器切口图案,图5中的(b)是虚线型大变形
的传感器切口图案,图5中的(c)是兼有虚线型和非对称粘性的传感器切口图案;图6中的(a)是单轴拉伸作用下的方形传感器电阻变化曲线图,图6中的(b)反复粘贴作用下的传感器电阻变化曲线图;图7中的(a)是基于剪纸的虚线型传感器的结构示意图,图7中的(b)是基于剪纸的虚线型传感器的电阻变化曲线图;图8中的(a)是施加重物的传感器的结构示意图,图8中的(b)是单元传感器的重量-电阻感应曲线图;图9中的(a)为阵列化传感器施加“x”形的重物的示意图,图9中的(b)为施加“x”形的重物时该阵列化传感器的重量-电阻感应曲线图,图9中的(c)为阵列化传感器施加“y”形的重物的示意图,图9中的(d)为施加“y”形的重物时该阵列化传感器的重量-电阻感应曲线图;图10中的(a)是基于振动的传感器电阻变化曲线图,图9中的(b)是基于温度感应的传感器电阻变化曲线图;图中,1、传感器基材;2、功能性切口;3、止裂孔;4、图案化的电极;5、导线;6、胶层;7、离型纸;21、镂空型切口;22、虚线型切口;23、非对称虚线型切口;41、蛇形电极。
具体实施方式
18.本发明公开的一种非对称的强粘易撕传感器,其结构图如图1所示,包括传感器基材1、功能性切口2、止裂孔3、图案化的电极4和导线5、胶层6和离型纸7;所述传感器基材1的底部涂覆有胶层6;所述胶层6的底部覆有离型纸7,用于保护胶层6;所述传感器基材1表面开有功能性切口2,所述功能性切口2为沿剥离方向轴对称的切割线,并完全贯穿传感器基材1,所述功能性切口2的图案优选半封闭型、镂空型或虚线型。功能性切口2的末端开有止裂孔3,阻止裂纹因为应力集中在传感器基材1的内部扩展;由功能性切口2的切割线所围区域作为传感测量的功能区,所述功能区内有布置有图案化的电极4,并在电极引脚处粘贴铜箔引出导线5。
19.由于本发明公开的非对称的强粘易撕传感器,对材料的厚度和弯折性有一定要求,因此选用柔性薄膜作为传感器基材1,来制作各向异性的传感器结构。所述传感器基材1优选pic水凝胶、pet或pdms等柔性薄膜。所述电极4优选纳米银线、金、铜等金属单质, ito和pedot:pss等金属氧化物或导电聚合物;电极制作工艺按所选材料作调整,可采用旋涂、蚀刻、蒸镀和磁控溅射等工艺。所述胶层6优选丙烯酸胶层,应用于人体皮肤的传感器可选用医用粘接剂,应用于普通工件表面可选用的粘附层为3m双面胶带;为保证传感器强度和柔性,传感器基材1的厚度应控制在为0.1~0.5mm之间,传感器总厚不高于3mm,功能性切口2的缝隙宽度应小于0.2mm,止裂孔3的直径在0.5~3mm范围内;为确保粘附和导电效果,功能性切口2总宽和传感器基材1的宽度应大于1:4,电极4的厚度应大于0.01mm,电极4的线宽不应低于0.3mm。
20.实施例一以pic水凝胶作为柔性基材制备非对称强粘易撕的传感器,具体制作流步骤为:步骤1:制备pic(导电离子聚合物)水凝胶薄膜,首先在90℃的离心管利用盐溶液(2.5m)浸泡pic粉末 6小时,然后5000~14000 rpm离心处理10 分钟,每小时3次,去除其中
的气泡,得到均匀的pic凝胶,再将样品在90℃下保持10分钟以增加其流动性,并将其倒入聚四氟乙烯(ptfe)模具中,立即在室温下压缩20分钟以成型,待成型后取出,在底部粘贴丙烯酸胶层作为胶层6,在丙烯酸胶层的底部粘贴离型纸7用于保护胶层6;步骤2:可由autocad或coreldraw等平面设计软件来设计切口图案,通过激光切割、冲裁或蚀刻等成型工艺形成粘附调控的功能性切口2,用工业酒精清理表面,并用40~100w功率进行等离子处理2~5min,提高水凝胶表面活性;步骤3:将绘有电极4图案的金属掩膜贴附于水凝胶薄膜表面,由于pic水凝胶自带一定粘性,可与金属掩膜形成紧密粘连,此处可不需粘接剂;步骤4:将纳米银线(agnw)溶液滴入金属掩膜的图案空隙中,静置待溶剂挥发,将金属掩膜揭去,并在电极4引脚处粘贴铜箔引出导线5,从而集成agnw/pic水凝胶柔性薄膜,即为本发明所揭示的基于剪纸的强粘易撕应变传感器。
21.本实施例所述的agnw/pic水凝胶柔性传感器,由于水凝胶易失水改变性质,在切割出调控粘性的切口后,宜置于水环境中,待使用时取出,并在1小时内制备电极并完成相应的测试,但本发明之根本精神不限于此材料和使用方式,使用者宜酌情调整。
22.实施例二以pdms(聚二甲基硅氧烷)作为柔性基材来制备非对称强粘易撕的传感器,与实施例一中的主要区别在于步骤1中基材的制备方法,具体包括以下步骤:步骤1:首先用pdms(康道宁184)前驱液与固化液按10:1的比例混合,并置于离心机中以500~2000 rpm的转速混合5~10分钟,再注入ptfe(聚四氟乙烯)模具中,并真空除泡5~10分钟,放入烘箱65℃加热1~2小时,脱模后在底部粘贴丙烯酸胶层作为胶层6,在丙烯酸胶层的底部粘贴离型纸7用于保护胶层6;步骤2:通过激光切割或冲裁工艺形成粘附调控的功能性切口2,用工业酒精清理表面,并用40~100w功率进行等离子处理2~5min,提高传感器基材表面活性;步骤3:将绘有电极4图案的金属掩膜贴附于传感器基材表面,由于pdms与掩膜的粘附较弱,因此用硅橡胶胶水涂在掩膜边缘,盖上掩膜并静置10分钟,使得基材与掩膜紧密贴合,再拭去表面残胶;步骤4:将纳米银线(agnw)溶液滴入金属掩膜的图案空隙中,静置待溶剂挥发,将金属掩膜揭去,并在电极4引脚处粘贴铜箔引出导线5,即得本发明所揭示的非对称的强粘易撕应变传感器。
23.实施例三为提升传感器在不同粘性需求的适应性,本发明所述的功能性切口(2)如图5所示,具体的图5中的(a)是镂空型非对称粘性的传感器切口图案21,图5中的(b)是虚线型大变形的传感器切口图案22,图5中的(c)是兼有虚线型和非对称粘性的传感器切口图案23;其中图5(a)中的镂空型切口21不仅具备强粘易撕的特性,还可以对所传感物体的表面凸起进行保护,还可以对电子器件和微结构等的实时监测;图5(b)中的虚线型切口22包括但不限于等腰三角形、矩形、等腰梯形和半圆形等图案,只需保证切口有朝向不封闭即可;所述虚线型切口22可适应大变形和复杂轮廓的贴合,如应用在皮肤、关节和非规则结构的表面;图5(c)中的非对称虚线型切口23则兼具大变形和强粘易撕的功能特性。
24.图2是具有方形强粘易撕切口的传感器沿正反两向90度剥离的对比图,其中无量
纲剥离力源于无切口情形的标准化处理,正向低剥离力和反向高剥离力即是本发明揭露强粘易剥的实质。进一步地,表一揭示了不同切口方案的传感器的剥离力对比数据,在切口宽度一致时,表明不封闭切口有更明显的强粘易撕的特性。
25.表一:各传感器的剥离力对比数据表实施例四本发明制得的虚线型切口的传感器可以适用于弯曲程度大、变形大的表面,如人体皮肤、关节以及大转角和复杂曲面的工件。首先将传感器底部的离型纸7撕去,将切口围成的区域(即功能区)贴附于待检测的物体表面,再把传感器其余部分贴紧,将传感器连通检测电路完成传感测试,等测试完毕后,顺着切口的正向将传感器撕除。将本发明制得的传感器贴附在弯曲的人体关节上,如图3所示,图3中的(a)是虚线型切口的传感器贴附在人体关节的效果图,图3中的(b)是非对称虚线型切口的传感器贴附在人体关节的效果图,表面该传感器能够较好地贴合在人体关节部位,实现与复杂表面的紧密贴附。
26.实施例五对本发明制得的传感器进行粘性剥离测试。
27.图4中的(a)是传感器功能区的结构示意图,图4中的(b)是粘性功能区不同宽度的剥离强度关系曲线;由图4可知,本发明传感器总宽度一致,随着切口宽度增加,正反两向的粘性差异更明显。但切口越宽,材料越易破坏,所以应以传感器材料特性、尺寸和强度等酌情选用。
28.实施例六对本发明制得的无切口的传感器进行单轴拉伸和反复粘贴测试,以传感器拉伸的位移量与初始长度的比值作为应变值。
29.图6中的(a)是单轴拉伸无切口的传感器电阻变化曲线图,图6中的(b)反复粘贴作用下的传感器电阻变化曲线图;如图6所示,传感器拉伸应变在40%内应变和电阻映射关系显著,且在反复粘贴10次后电学性能仍然保持良好。
30.实施例七本发明还提供一种基于剪纸的虚线型的传感器结构,图7中的(a)是基于剪纸的虚线型传感器的结构示意图,图7中的(b)是基于剪纸的虚线型传感器的应变-电阻变化曲线图;电极的形状为绕过非对称虚线型切口23形成蛇形电极41。
31.实施例八对本发明制得的传感器进行承重测试,重量由承载的砝码提供,为避免损伤电极,在电极和重物之间垫一层无尘纸;图8中的(a)是施加重物的传感器的结构示意图,图8中的(b)是单元传感器的重量-电阻感应曲线图;数值为无载重状态的相对电阻变化百分比。
32.对本发明制得的传感器进行承重测试,“x”和“y”为激光切割的pmma(亚克力)板,并在其上施加砝码,图9中的(a)为3
×
3阵列化传感器施加“x”形的重物的示意图,图9中的(b)为施加“x”形的重物时该阵列化传感器的重量-电阻感应曲线图,图9中的(c)为3
×
3阵列化传感器施加“y”形的重物的示意图,图9中的(d)为施加“y”形的重物时该阵列化传感器的重量-电阻感应曲线图。由图10可知,振动-电阻感应曲线是贴附在人脖颈处的传感器随说话时间的电阻变化曲线,如说“ni hao”等音节,实时电阻由victor vc8246b数显万能表记录;温度-电阻感应曲线是将传感器贴在玻璃杯外,在30度水中逐步注入热水,利用红外线测温仪和数显万能表记录温度和电阻的变化,为保证温度充分传导至传感器,每次测量需静置1分钟,随着温度的升高,传感器电阻率变化越大。
33.以上所述仅为本发明之较佳实施例,并非用以限定本发明之权利范围;同时以上的描述,对于相关技术领域之专门人士应可明了及实施,因此其他未脱离本发明所揭示之精神下所完成的等效改变或修饰,均应包含在申请专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1