一种单频实时精密单点定位方法
1.本发明涉及一种单频实时精密单点定位方法,属于单频实时精密单点定位观测数据处理技术领域。
背景技术:
2.精密单点定位(precise point positioning,ppp)是目前导航定位领域的研究热点。近年来国内外学者对其进行了大量的研究,解决了许多关键性问题。而单频接收机由于价格低廉、上手方便,已广泛应用于变形监测、低轨卫星定轨以及地面网解算等领域,但单频ppp的定位精度与多频ppp相比还存在一定差距,最大的难点是电离层延迟的改正。寻找更加有效的电离层处理方法,能够在很大程度上改善单频ppp的定位精度。
3.现有单频实时精密单点定位的电离层延迟处理方法中,有采用电离层模型改正,构成半合观测值消除电离层低阶项,建立电离层斜延迟参数模型描述电离层的简单活动;还有的处理方法需要外部电离层信息,且建立的模型较为粗糙,仍存在较大的电离层延迟剩余误差,大大影响了单频ppp的定位精度。现有研究集中于电离层模型改正与附加电离层约束的单频ppp估计方法,其单频精密单点的定位精度直接取决于所建立的模型精度,而在估算电离层斜延迟时,将电离层参数作为参数估计会导致秩亏问题,造成定位精度低。
技术实现要素:
4.本发明的目的是提供一种单频实时精密单点定位方法,以解决目前单频实时精密单点定位精度低的问题。
5.本发明提供了一种单频实时精密单点定位方法,其特征在于,该方法包括以下步骤:
6.1)获取目标位置的多历元卫星观测数据;并对获取的数据进行数据预处理,得到预处理后的单点多历元观测数据;
7.2)利用预处理后的多历元观测数据,构建历元间观测数据的观测方程和状态方程;
8.3)采用自相关系数法确定多历元观测值之间的方差-协方差阵,并利用单频ppp算法确定多历元参数之间的先验方差-协方差阵;
9.4)设定第一滑动窗口尺寸,按照设定的第一滑动窗口尺寸采用滑动窗单频ppp算法,根据参数间的等价性建立参数的历元间约束方程,将该约束方程添加到平方根信息滤波模型中,并根据生成的观测值之间的方差-协方差阵与多历元参数之间的先验方差-协方差阵进行参数解算,得到坐标修正值,根据坐标修正值对单点概略坐标进行修正,实现精密单点定位;其中所述的平方根信息滤波模型包括有观测方程和状态方程。
10.本发明提出一种单频实时精密单点定位方法,利用单点多历元观测数据进行单频精密单点定位计算,避免因将电离层延迟作为参数导致的秩亏问题,并考虑到历元观测值和历元间参数的相关关系,构建观测值之间的方差-协方差阵和历元间参数的方差-协方差
阵,最后考虑历元间参数的等价性,根据滑动窗算法建立历元间的约束方程,解算单点坐标修正值,实现单点精密定位。本发明根据多历元卫星观测数据中参数的等价性,进行单频精密单点定位计算,解决了在单频精密单点定位计算中,将电离层延迟作为参数估计导致的秩亏问题,不需要引入外部电离层延迟信息和额外误差,提高了对电离层延迟进行参数估计的单频精密单点定位的精度和可靠性。
11.进一步地,所述步骤3)中观测值之间方差-协方差阵的计算公式为:
12.ρ
τ
=ρ
ij
=ρ
ji
,τ=|i-j|,(i,j=1,
…
,m)
[0013][0014]
式中,ρ为两个观测值之间的相关系数;m为参加计算的历元数;是第i历元的偏差,σi与σ
i+τ
分别为第i与第i+τ历元观测值的中误差;τ为两个观测值间间隔的历元数;ri与r
i+τ
分别为第i与第i+τ历元观测值的残差,并且满足ri=r
i+τ
=n-1,n为多历元观测中的可观测卫星数。
[0015]
进一步地,为了得到准确的单点多历元观测数据,所述步骤1)中数据预处理包括通过数据探测法探测并修复粗差、探测并修复钟跳;通过多普勒积分法与相位伪距组合法探测并修复周跳。
[0016]
进一步地,为了得到准确的单点多历元观测数据,所述的预处理还包括剔除卫星数据中的无效时段。
[0017]
进一步地,为了快速建立历元间的观测方程,所述步骤2)在建立观测方程前,设定第二滑动窗口尺寸,按照第二滑动窗口尺寸建立历元观测值滑动窗口,计算每个窗口下的历元观测值的观测方程。
[0018]
进一步地,为了方便计算,所述步骤2)中还包括对观测方程和状态方程进行线性化处理。
[0019]
进一步地,为了使计算结果更精准,所述步骤4)中在参数解算前,选择第一滑动窗口下第一组的模糊度作为基准值,所述模糊度根据单频的相位观测值减去伪距观测值,并对电离层延迟进行改正后得到。
[0020]
进一步地,所述步骤4)在进行参数解算时还需要建立观测值误差方程,该误差方程为:
[0021]vj
=ajxj+bjy
j-lj[0022]
式中,v为观测值误差矩阵;j为联合的历元数;xj为不被约束的j个历元的参数;yj为被约束j个历元的参数;aj与bj分别为xj与yj的系数行满秩矩阵;lj为误差向量。
附图说明
[0023]
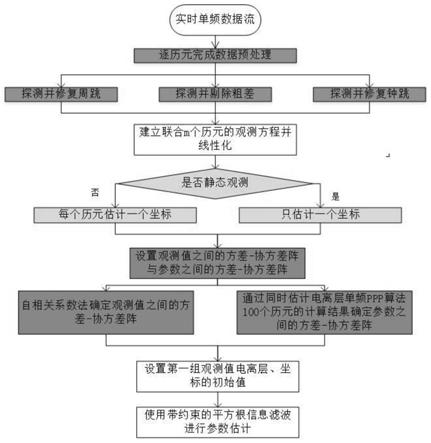
图1是本发明单频实时精密单点定位方法的流程图。
具体实施方式
[0024]
下面结合附图对本发明的具体实施方式作进一步地说明。
[0025]
本发明提出一种单频实时精密单点定位方法,具体流程如图1所示。该方法首先对获取的单点多历元观测数据进行数据预处理;再利用预处理后的多历元观测数据,构建历元间观测数据的平方根信息滤波模型的观测方程和状态方程;然后采用自相关系数法确定多历元观测值之间的方差-协方差阵,并利用单频ppp算法确定多历元参数之间的先验方差-协方差阵;最后根据参数间的等价性建立参数的历元间约束方程,将该约束方程添加到平方根信息滤波模型中进行参数解算,得到坐标修正值并对单点概略坐标进行修正,实现精密单点定位。本发明根据多历元卫星观测数据中参数间的等价性进行单频精密单点定位计算,解决了在单频精密单点定位中,将电离层延迟作为参数估计导致的秩亏问题,不需要引入外部电离层延迟信息和额外误差,提高了对电离层延迟进行参数估计的单频精密单点定位的精度与可靠性。
[0026]
步骤1.数据获取与数据预处理
[0027]
本发明采用单频接收机获取多历元卫星观测数据,在卫星观测过程中,卫星、接收机及信号传播都会对测量值造成一定误差,主要是在卫星信号传播过程中受到卫星钟差、接收机钟差、电离层延迟、对流层延迟、多路径效应等因素的影响。因此在获取到多历元观测数据后,首先要对多历元卫星观测数据进行数据预处理,预处理方式包括:采用数据探测法对历元数据进行粗差探测和修复、钟跳探测和修复;采用多普勒积分法与相位伪距组合法探测并修复周跳,同时剔除一些卫星数据中的无效时段,如多路径反射、卫星信号阻挡造成的无效数据。
[0028]
其中,探测与修复周跳的方法为:计算出历元间的多普勒积分,通过多普勒积分平滑伪距观测值,再利用平滑后的伪距观测值与相位观测值组合,探测卫星观测值中发生的周跳,当周跳值在一定范围中时,认为周跳探测准确,通过取整确定周跳值,然后在观测数据中对其进行改正。
[0029]
步骤2.构建观测方程和状态方程
[0030]
根据步骤1预处理后的多个历元数据,建立预处理后多历元观测数据之间的观测方程和状态方程,作为后续平方根信息滤波模型的观测方程和状态方程。为了方便后续计算,对得到的观测方程和状态方程进行线性化处理。其中,在建立观测方程前,设定第二滑动窗口尺寸,按照第二滑动窗口尺寸建立历元观测值滑动窗口,计算每个窗口下的历元观测值的观测方程。在本实施例中,取两个及其以上的历元观测值作为滑动窗,每一次计算完成后,滑动窗向下滑动一次,接收机钟差、对流层延迟、电离层延迟以及模糊度动静态设置相同,但在静态观测下,接收机在单点位置保持不动,动态观测下,接收机观测不同单点信息,因此坐标参数静态情况下多个历元设置三个参数(x,y,z),动态情况下每一个历元设置三个参数(xi,yi,zi),其中i表示第i个历元,得到每个滑动窗下历元观测值的观测方程。
[0031]
步骤3.确定观测值、参数的方差-协方差阵
[0032]
根据步骤1预处理后的多历元观测数据,确定多历元观测值之间的方差-协方差阵、多历元参数间的先验方差-协方差阵。
[0033]
其中,采用自相关系数法确定观测值之间的方差-协方差阵,其计算公式为:
[0034]
ρ
τ
=ρ
ij
=ρ
ji
,τ=|i-j|,(i,j=1,
…
,m)
[0035]
[0036]
式中,ρ为两个观测值之间的相关系数;m为参加计算的历元数;是第i历元的偏差,σi与σ
i+τ
分别为第i与第i+τ历元观测值的中误差;τ为两个观测值间间隔的历元数;ri与r
i+τ
分别为第i与第i+τ历元观测值的残差,并且满足ri=r
i+τ
=n-1,n为多历元观测中的可观测卫星数。
[0037]
其中,通过估计电离层单频ppp算法对t个历元数据的计算结果确定参数的先验方差-协方差阵。在本实施例中,t设置为100个。作为其他实施方式,t的取值可以根据具体历元个数确定。
[0038]
步骤4.参数解算及观测值修正
[0039]
本发明采用滑动窗单频ppp算法,根据参数间的等价性建立参数历元间约束方程,将该约束方程添加到平方根信息滤波模型中,并根据步骤3生成的观测值之间的方差-协方差阵、参数间的先验方差-协方差阵进行参数解算,得到单点的坐标修正值,对单点的概略坐标进行修正,得到精确的单点定位坐标,实现单点精密定位。其中,平方根信息滤波算法模型中包含步骤2生成的观测方程和状态方程;历元间参数可分成被约束参数和不被约束参数,其中,参数是否选择被约束可以根据观测数据的实际情况由用户自行确定。
[0040]
在构建参数历元间约束方程时,设定第一滑动窗口的尺寸,,采用确定尺寸的滑动窗单频ppp算法,根据各滑动窗下观测值以及参数的相关性,在理论上前后两次计算中参数存在等价性,利用该等价性可以建立相应的历元间约束方程。
[0041]
在平方根信息滤波模型参数解算过程中,需不断调整约束方程与观测方程的权值,约束方程与观测方程两者的权根据收敛程度进行相应调整,若已经收敛则约束方程的权值较高,未收敛时则观测方程的权值较高。当收敛精度达到1-3分米时,满足解算精度,根据各滑动窗口解算出的结果调整约束方程与观测方程权值,此时,约束方程的权值较高,观测方程的权值较低。
[0042]
在进行参数解算前,为了解决电离层延迟作为估计参数导致的秩亏问题,采用第一滑动窗口下第一组观测数据的模糊度作为基准值,即在确定的第一滑动窗口尺寸下该窗口第一组观测数据的模糊度,将其约束到近似值,该近似值通过单频的相位观测值减去伪距观测值,并对电离层延迟进行改正后得到,这可以使计算结果更准确,提高单点定位精度。
[0043]
同时,在进行参数的解算前还需要建立观测值误差方程,该误差方程为:
[0044]vj
=ajxj+bjy
j-lj[0045]
式中,v为观测值误差矩阵;j为联合的历元数;xj为不被约束的j个历元的参数;yj为被约束的参数;aj与bj分别为xj与yj的系数行满秩矩阵;lj为误差向量。
[0046]
为了证明本发明在单频精密单点定位中的可靠性,利用全球分布的15个基准站14天的观测数据以及在德国莫里茨湖采集的船载数据进行解算。通过测试,本发明提出的附加历元间约束的滑动窗单频ppp计算方法与传统单频ppp计算方法相比,大大缩短了收敛时间,提高了解算精度,静态定位解的精度优于3厘米,模拟动态解可以达到1.5分米的精度,相比传统的单频ppp方法,该方法的收敛速度提高了24%左右,定位精度提高了30%左右,特别是高程分量定位精度提高更为明显。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1