一种雷达噪声去除及边界定位方法
1.本发明属于雷达随机噪声检测领域,具体是一种雷达噪声去除及边界定位方法。
背景技术:
2.雷达的基本任务是探测感兴趣的目标,电磁波遇到目标后,沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被天线获取,形成回波信号。由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没;从某种意义上来说,雷达噪声是不可避免的。
3.雷达噪声一般分为两种:随机噪声和系统噪声。系统噪声的产生,一般和电路设计、制作材料、元器件尺寸以及应用场景相关,其出现的位置具有一定的规律;随机噪声的来源比较多样,一般可分为:人为噪声、自然噪声和内部噪声。
4.随机噪声是一种前后独立的平衡随机过程,不仅幅度、波形及相位随机,其出现位置也随机。随机噪声既不能预知其精确大小及规律,也不能完全消除,但一般服从一定的统计分布规律,可通过一些措施来控制。
5.为了消除随机噪声,可通过频域滤波和平均采样等方法来实现,但是这两种方法都存在以下缺点:
6.1、频域滤波;一般情况下,噪声大多为高频成分,而雷达信号为低频成分;进行频域变换后,可通过高频滤波将噪声清除;但频域变换需要较强算力,运算复杂,在低成本应用中不太实用。
7.2、平均采样:在时域中,大多数随机噪声是加性零均值高斯噪声,即满足:
8.0=f
t1
(x,y)+......+f
tn
(x,y)
9.若使用平均采样消除噪声,则需要叠加较多采样数据,取平均以消除噪声;在实际应用中费时、费力。
10.而且,使用雷达进行边界检测和定位,点云中的噪声会使边界定位精度变差、甚至是无法定位。为了实现准确定位,在边界检测前都需要消除点云噪声。
技术实现要素:
11.针对上述问题,本发明提出了一种雷达噪声去除及边界定位方法,根据随机噪声的特性,使用可变邻域快速判别随机噪声,进而实现雷达随机噪声检测及消除的目的。
12.所述的雷达噪声去除及边界定位方法,具体步骤如下:
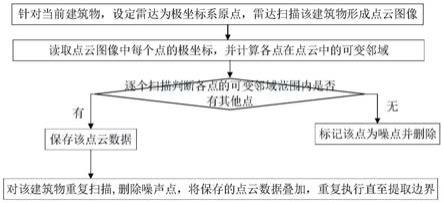
13.步骤一、针对当前建筑物,设定雷达的位置为极坐标系的原点o,雷达天线发送电磁波信号扫描该建筑物,形成点云图像;
14.步骤二、读取点云图像中每个点的极坐标,并计算各点在点云中的可变邻域;
15.任意点a的极坐标为(ρa,θa),其中ρa为点a的极径,θa为点a的极角;
16.点a在点云中的可变邻域定义为:
17.u(a,δ)={b|d(a,b)《δ}
18.δ为可变邻域的半径,根据实际情况人为设定具体取值;d(a,b)为点a与点云中任意点b之间的距离;
[0019][0020]
点b的极坐标为(ρb,θb)。
[0021]
步骤三、逐个扫描判断各点的可变邻域范围内是否有其他点,如果有,保存该点云数据并进入步骤四,否则,标记该点为噪点;当扫描完毕后,将标记为噪点的点全部删除,实现可变邻域滤波去除雷达的随机噪声。
[0022]
步骤四、对该建筑物重复扫描,并删除各点云图像中的噪声点后,将其与保存的点云数据叠加,重复执行若干次,直至从叠加点云数据提取边界为止。
[0023]
执行的次数根据实际扫描情况设定,取值为4-10次。
[0024]
进一步,本发明通过可变邻域滤波去除噪点的方案,替换为直接判别雷达点云密度,将点云密度小于设定阈值的区域中的噪点删除。
[0025]
本发明的优点在于:
[0026]
一种雷达噪声去除及边界定位方法,从雷达点云中查找并判定随机噪声,根据随机噪点孤立存在的特性,使用可变邻域滤波方法,将孤立噪点从雷达点云中删去后进行边界判定。本发明具有实现简单,直观明了,成本较低和节省时间的优点。
附图说明
[0027]
图1为现有技术中包含随机噪点的雷达点云图;
[0028]
图2为本发明一种雷达噪声去除及边界定位方法的流程图;
[0029]
图3为本发明实施例中雷达点云可变邻域示意图;
[0030]
图4为本发明使用可变邻域滤波去除雷达的随机噪点的流程图;
[0031]
图5为本发明边界计算的流程图。
具体实施方式
[0032]
为使本发明实施例的技术方案以及优点表达的更清楚,下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
[0033]
众所周知,使用雷达探测建筑物边界时,雷达天线发送电磁波信号形成点云,因此距离雷达天线越近点云密度越高,距离雷达天线越远点云密度越低,即边界边缘的点云密度相对较高。而因人为、自然或电路等原因形成的随机噪声点则较为孤立,数量一般较少,如图1所示。此时的随机噪声点,其邻域范围内一般不存在其他点。
[0034]
本发明提出了一种雷达噪声去除及边界定位方法,从雷达点云中查找并判定随机噪声,将其删除后进行边界判定。根据噪声理论可知,随机噪点是一种前后独立的随机信号,一般与点云中的其他点不相关。根据随机噪点孤立存在的特性,可使用特殊的邻域滤波方法,将孤立噪点从雷达点云中删去。
[0035]
所述的雷达噪声去除及边界定位方法,如图2所示,具体步骤如下:
[0036]
步骤一、针对当前建筑物,设定雷达的位置为极坐标系的原点o,雷达天线发送电磁波信号扫描该建筑物,形成点云图像;
[0037]
步骤二、按顺序读取点云图像中每个点的极坐标,并计算各点在点云中的可变邻
域;
[0038]
任意点a的极坐标为(ρa,θa),其中ρa为点a的极径,θa为点a的极角;
[0039]
平面图像中定义的不变邻域,在点云中不再适用。在极坐标中(三维系统中为球坐标)点a在点云中的可变邻域定义为:
[0040]
u(a,δ)={b|d(a,b)《δ}
[0041]
d(a,b)为点a与点云中任意点b之间的距离;
[0042][0043]
点b的极坐标为(ρb,θb);δ为可变邻域的半径,正比于点a到原点o的距离ρa,即δ=γρa;根据实际情况人为设定具体取值;本实施例给出的可变邻域如图3所示。
[0044]
步骤三、使用可变邻域滤波去除雷达的随机噪声,并保存点云数据;
[0045]
如图4所示,具体为:逐个扫描存入线性表中的点云,判断当前点的可变邻域范围内是否有其他点,如果有,保存该点云数据,并移到下一个点继续重复判断;否则,标记该点为噪点;
[0046]
当扫描完毕后,将标记为噪点的点全部删除;实现可变邻域滤波去除雷达的随机噪声。
[0047]
步骤四、对该建筑物重复扫描,并删除各点云图像中的噪声点后,将其与保存的点云数据叠加,重复执行若干次,直至满足边界的条件后,从叠加点云数据提取出边界。
[0048]
雷达点云中的噪点删除完后,便可使用最小二乘法进行边界的判定。若要精确判定边界,可采用多帧点云叠加的方法来进行,具体为如图5所示,执行的次数根据实际扫描情况设定,取值为4-10次,多次叠加后,建筑物边界的点云密度会变大,成为密集点云;根据密集点云,便可确定边界。
[0049]
进一步,本发明通过可变邻域滤波去除噪点的方案,替换为直接判别雷达点云密度,将点云密度小于设定阈值的区域中的噪点删除。
[0050]
本发明的创新点包括:可变邻域定义方法,点云中噪声点去除方法,以及去除噪点后点云叠加确定边界。
[0051]
本发明的方案也可通过直接判别雷达点云密度来实现,将点云密度较小区域中的噪点删除也可实现去除噪点的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1