一种水下垂直阵阵元位置测量系统的制作方法
1.本实用新型涉及水下探测技术领域,尤其涉及一种水下垂直阵阵元位置测量系统。
背景技术:
2.水下目标辐射噪声是其隐蔽性的重要指标之一,用以评价水下目标招致敌方声呐探测和水中兵器攻击的危险性。准确测量和评估水下目标的辐射噪声水平,是检验该产品技术指标实现情况和设计定型的重要依据。随着减振降噪技术的发展,水下目标辐射噪声逐渐降低,在同等背景噪声条件下,传统的单水听器测量方法已逐渐无法满足对安静型水下目标辐射噪声的测试信噪比需求。与单水听器测量方法相比,采用垂直阵测量方法可提高测量信噪比,减小测量起伏,提高测量结果的准确性。
3.垂直阵校准系统受水流的影响会产生倾斜,进而影响探测精度和测量结果。为减小测量误差,实现对安静型水下目标辐射噪声的准确测量,有必要对垂直阵的水下姿态进行阵型校准,因此需要提高水下垂直阵的阵元位置测量结果的准确性。目前的测量系统不能直接用于对水下垂直阵的阵元位置进行准确测量,因此,需要提供一种可以用于对水下垂直阵阵元位置进行测量的系统,以提高水下垂直阵的阵元位置测量结果的准确性。
技术实现要素:
4.本技术实施例通过提供一种水下垂直阵阵元位置测量系统,可以用于对水下垂直阵阵元位置进行测量,以提高水下垂直阵的阵元位置测量结果的准确性。
5.本实用新型提供一种水下垂直阵阵元位置测量系统,其包括:垂直阵、第一测深仪、数据采集设备以及声源;所述垂直阵、所述第一测深仪以及所述声源均设置于水下,且所述垂直阵、所述第一测深仪以及所述数据采集设备之间通过电缆串联,所述垂直阵的相邻阵元之间的间距在3cm
‑
75m之间。
6.优选的,所述电缆为多芯电缆。
7.优选的,所述垂直阵包含有m个阵元,所述电缆的缆芯数量至少为2m+2条,m≥2。
8.优选的,所述电缆的缆芯中包括2m条信号缆芯以及2条电源缆芯。
9.优选的,所述垂直阵的阵元均匀分布。
10.优选的,所述垂直阵的顶端阵元的水深不少于10米。
11.优选的,所述水下垂直阵阵元位置测量系统,还包括:第一配重装置;
12.所述第一配重装置、所述垂直阵、所述第一测深仪以及所述数据采集设备之间通过电缆串联。
13.优选的,所述水下垂直阵阵元位置测量系统,还包括:第二测深仪和第二配重装置;所述第二测深仪与所述第二配重装置连接。
14.优选的,所述水下垂直阵阵元位置测量系统,还包括:显示终端;所述显示终端与所述数据采集设备通讯连接。
15.优选的,所述水下垂直阵阵元位置测量系统还包括:测量船;所述数据采集设备以及所述显示终端均设置于所述测量船上。
16.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
17.本实用新型提供的水下垂直阵阵元位置测量系统包括:垂直阵、第一测深仪、数据采集设备以及声源;垂直阵、第一测深仪以及声源均设置于水下,且垂直阵、第一测深仪通过电缆与数据采集设备连接。数据采集设备可以获取垂直阵上部电缆在垂直方向的倾斜角度、垂直阵声学段在垂直方向的倾斜角度、垂直阵在竖直状态下的阵元间距,再利用第一测深仪获取垂直阵在竖直状态下的悬挂点与水面之间的距离、垂直阵声学段顶端与水面之间的距离。数据采集设备还可以用于根据获取的倾斜角度及距离参数,计算得到垂直阵阵元位置。垂直阵的相邻阵元之间的间距在3cm
‑
75m之间,对应可以接收10~50000hz的水声信号,方便垂直阵阵元位置的计算过程中的参数获取。数据采集设备利用倾斜角度及距离参数计算阵元位置,考虑了垂直阵在水下所受水流的影响会发生倾斜以及对应倾斜角度,因此,本实用新型提供的测量系统,可以用于对垂直阵的水下姿态进行校准,以提高水下垂直阵的阵元位置测量结果的准确性。
附图说明
18.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
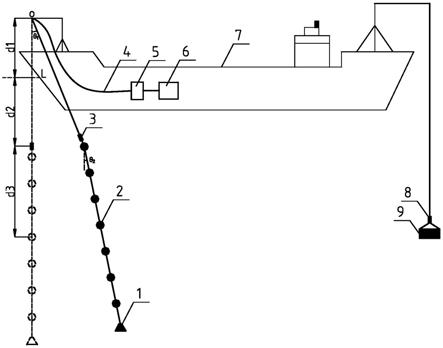
19.图1是本实用新型提供的水下垂直阵阵元位置测量系统的示意图;
20.图2是本实用新型提供的一实施例中垂直阵中心深度与声源距离对应的二维估计结果示意图;
21.图3是本实用新型提供的一实施例中声源定位结果示意图;
22.图4是本实用新型提供的水下垂直阵阵元位置测量方法的流程图。
具体实施方式
23.为了使本技术所属技术领域中的技术人员更清楚地理解本技术,下面结合附图,通过具体实施例对本技术技术方案作详细描述。
24.本实用新型提供一种水下垂直阵阵元位置测量系统,如图1所示,水下垂直阵阵元位置测量系统包括:测量船7、配重设备、垂直阵2、测深仪、数据采集设备5、显示终端6以及声源9;配重设备、垂直阵2、测深仪以及声源9均设置于水下,且配重设备、垂直阵2、测深仪、数据采集设备5以及显示终端6之间通过电缆4串联。数据采集设备5以及显示终端6均设置在测量船7上。垂直阵2的相邻阵元之间的间距在3cm
‑
75m之间,对应接收10~50000hz的水声信号。
25.在一实施例中,测深仪包括第一测深仪3和第二测深仪8,配重设备包括第一配重设备1和第二配重设备。第一配重设备1、垂直阵2、第一测深仪3、数据采集设备5以及显示终端6之间通过电缆串联。第二配重设备、声源9以及第二测深仪8之间通过电缆串联且连接至测量船7。
26.垂直阵2的阵元均匀分布,垂直阵2的顶端阵元的水深不少于10米,垂直阵2包含有m个阵元,m≥2。电缆为多芯电缆,电缆的缆芯数量至少为2m+2条,电缆的缆芯中包括2m条信号缆芯以及2条电源缆芯。垂直阵2每一阵元均连接有两条缆芯,且垂直阵2还需要两条缆芯进行供电。
27.声源9用于发生水声信号,可以采用标准声源9。
28.理想状态下无水流和风浪时,垂直阵2在重力作用下处于竖直状态,如图1中的虚线所示;实际中,受水流和风浪的影响,垂直阵2会产生倾斜,且由于配重设备的影响,垂直阵2下部声学段的倾斜小于上部电缆的倾斜,因而可将垂直阵2简化为图1中实线所示的倾斜模型。
29.数据采集设备5包括:距离获取模块、第一深度获取模块、第一倾斜角度获取模块、第二深度获取模块、第二倾斜角度获取模块、阵元间距获取模块、阵元位置计算模块。
30.距离获取模块用于获取第一距离和第二距离;第一距离为垂直阵在竖直状态下的悬挂点与水面之间的距离,第二距离为垂直阵声学段顶端与水面之间的距离。
31.第一深度获取模块用于获取垂直阵在倾斜状态下的深度。
32.第一倾斜角度获取模块用于根据第一距离、第二距离以及垂直阵在倾斜状态下的深度,计算得到第一倾斜角度,第一倾斜角度为垂直阵2上部电缆在垂直方向的倾斜角度。
33.第二深度获取模块用于获取垂直阵声学段的中心深度。
34.第二倾斜角度获取模块用于根据垂直阵声学段的中心深度、垂直阵在倾斜状态下的深度以及垂直阵的半阵长度,计算得到第二倾斜角度,第二倾斜角度为垂直阵2声学段在垂直方向的倾斜角度。
35.阵元间距获取模块用于获取垂直阵在竖直状态下的阵元间距。
36.阵元位置计算模块用于根据第一倾斜角度、第二倾斜角度、第一距离、第二距离以及阵元间距,计算得到垂直阵阵元位置。
37.水下垂直阵阵元位置测量系统还包括测深仪和配重设备。配重设备、垂直阵、测深仪以及数据采集设备之间通过电缆串联。测深仪用于测量第一距离和第二距离,并将第一距离和第二距离发送至数据采集设备。
38.具体的,第一倾斜角度获取模块用于通过如下公式计算第一倾斜角度:
[0039][0040]
其中,θ1为第一倾斜角度,d1为第一距离,d2为第二距离,d
d
为垂直阵在
[0041]
倾斜状态下的深度。
[0042]
在一实施例中,垂直阵2声学段的中心深度为z0,垂直阵2的半阵长度为d3,第二倾斜角度θ2计算公式如下:
[0043][0044]
第二深度获取模块包括:时序计算单元、频域计算单元、矩阵计算单元、目标定位函数计算单元、中心深度计算单元。
[0045]
时序计算单元用于获取垂直阵2阵元的时域数据。
[0046]
频域计算单元用于根据时域数据,计算得到频域数据。
[0047]
矩阵计算单元用于根据频域数据,计算得到垂直阵2实测数据的协方差矩阵。
[0048]
目标定位函数计算单元用于获取近场阵列流行向量,并根据协方差矩阵以及近场阵列流行向量,计算得到目标定位函数。
[0049]
具体的,目标定位函数计算单元用于根据水下声源9探测频率、水下声源9与垂直阵2的阵元之间的距离,计算得到近场阵列流行向量。
[0050]
中心深度计算单元用于根据目标定位函数,计算得到垂直阵2声学段的中心深度。
[0051]
阵元间距获取模块用于获取垂直阵2在竖直状态下的阵元间距。
[0052]
阵元位置计算模块用于根据第一倾斜角度、第二倾斜角度、第一距离、第二距离以及阵元间距,计算得到垂直阵2阵元位置。
[0053]
下面在距离和深度维上进行目标位置估计,假定垂直阵2采样得到m个阵元的时域数据为x(t):
[0054]
x(t)=[x1(t),x2(t),
…
x
n
(t),
…
x
m
(t)]
ꢀꢀꢀ
(3)
[0055]
式中x
n
(t)为第n个采样点的时域数据,m为垂直阵2阵元个数。
[0056]
对式(3)进行傅里叶变换得到频域数据x(f):
[0057][0058]
利用下式计算得到垂直阵2实测数据的协方差矩阵
[0059][0060]
式中上标(h)表示共轭转置。
[0061]
以垂直阵2与声源9的水平距离r和垂直阵2深度z为变量的目标定位函数可表示为:
[0062][0063]
式中w(r,z)表示近场阵列流形向量,上标h表示共轭转置,以垂直阵2中心阵元为参考阵元,表示为:
[0064][0065]
式中c为水下声速,f为水声信号频率,d
i
(r,z)表示声源9位置点(r,z)到第i个阵元的距离,表示为:
[0066][0067]
其中z
i
表示第i个阵元的深度。
[0068]
目标函数最大值点对应的深度z
o
即为垂直阵2的中心深度,进一步结合垂直阵2的第一倾斜角度θ1和第二倾斜角度θ2可以求得每个阵元的位置。以垂直阵2悬挂点o为原点,计算得到校准后的阵元位置:
[0069][0070]
式中h为垂直阵2竖直状态下的阵元间距。
[0071]
在计算得到校准后的阵元位置后,可以根据第二测深仪8记录的声源9深度,利用近场聚焦波速形成方法,结合声源9的幅度和相位信息,对该阵元位置进行验证,确定校准后的阵元位置是否准确。
[0072]
在另一具体实施例中,利用米尺测量得到第一距离d1=5.0米、第二距离d2=9.6米、垂直阵2的半阵长度d3=15.36米、垂直阵2竖直状态下的阵元间距h=5.0米,利用第一测深仪3记录垂直阵2倾斜状态下的深度d
d
=8.34米,利用第二测深仪8记录声源9的深度d
s
=24.65米,代入式(1)计算得到该工况下垂直阵2上部线缆的倾斜角度为θ1=24
°
。
[0073]
利用声源9发射线型调频信号,开启数据采集设备5记录m元垂直阵2的时域数据x(t)。
[0074]
利用式(4)对m元垂直阵2的时域数据x(t)做傅里叶变换得到频域数据x(f),利用式(5)求得频域数据的协方差矩阵
[0075]
利用式(7)和式(8)计算垂直阵2的垂直阵2的阵列流形向量w(r,z),代入式(6)计算目标定位函数φ(r,z)。
[0076]
绘制目标定位函数φ(r,z)关于距离r和深度z的二维伪彩图,如图2所示,最大值点(23.69,39.6)对应的深度即为基阵中心深度,即垂直阵2中心深度z
o
为23.69米。
[0077]
将z
o
代入式(2)计算得到垂直阵2声学段在垂直方向的倾角θ2=2
°
,将上述参数代入式(9)即可计算得到校准后的阵元位置p
i
(x,z)。
[0078]
利用校准后的垂直阵2阵型,对声源9进行位置估计,得到如图3所示的距离深度二维图。可以看出,估计的声源9位置和实际声源9位置(39.6,24.65)相符,说明校准后的垂直阵2阵型和实际情况相符。
[0079]
本实用新型还提供一种水下垂直阵阵元位置测量方法,该方法由上述的水下垂直阵阵元位置测量系统执行,如图4所示,该方法包括:
[0080]
s1、获取第一距离和第二距离;第一距离为垂直阵在竖直状态下的悬挂点与水面之间的距离,第二距离为垂直阵声学段顶端与水面之间的距离。
[0081]
s2、获取垂直阵在倾斜状态下的深度。
[0082]
s3、根据第一距离、第二距离以及垂直阵在倾斜状态下的深度,计算得到第一倾斜角度,第一倾斜角度为垂直阵2上部电缆在垂直方向的倾斜角度。
[0083]
s4、获取垂直阵声学段的中心深度。
[0084]
获取垂直阵2声学段中心深度,包括:
[0085]
s221、获取垂直阵2阵元的时域数据。
[0086]
s222、根据时域数据,计算得到频域数据。
[0087]
s223、根据频域数据,计算得到垂直阵2实测数据的协方差矩阵。
[0088]
s224、获取近场阵列流行向量,并根据协方差矩阵以及近场阵列流行向量,计算得到目标定位函数。
[0089]
获取近场阵列流行向量,包括:
[0090]
根据水下声源9探测频率、水下声源9与垂直阵2的阵元之间的距离,计算得到近场阵列流行向量。
[0091]
s225、根据目标定位函数,计算得到垂直阵2声学段的中心深度。
[0092]
s5、根据垂直阵声学段的中心深度、垂直阵在倾斜状态下的深度以及垂直阵的半阵长度,计算得到第二倾斜角度,第二倾斜角度为垂直阵2声学段在垂直方向的倾斜角度。
[0093]
s6、获取垂直阵在竖直状态下的阵元间距。
[0094]
s7、根据第一倾斜角度、第二倾斜角度、第一距离、第二距离以及阵元间距,计算得到垂直阵阵元位置。
[0095]
综上所述,本实用新型提供的水下垂直阵阵元位置测量系统包括:垂直阵2、数据采集设备5以及声源9;垂直阵2以及声源9均设置于水下,且垂直阵2通过电缆与数据采集设备5连接。数据采集设备5可以获取垂直阵2上部电缆在垂直方向的倾斜角度、垂直阵2声学段在垂直方向的倾斜角度、垂直阵2在竖直状态下的悬挂点与水面之间的距离、垂直阵2声学段顶端与水面之间的距离、垂直阵2在竖直状态下的阵元间距,再根据获取的倾斜角度及距离参数,计算得到垂直阵2阵元位置。垂直阵的相邻阵元之间的间距在3cm
‑
75m之间,对应可以接收10~50000hz的水声信号,方便垂直阵阵元位置的计算过程中的参数获取。本实用新型提供的系统利用采集的倾斜角度及距离参数计算阵元位置,考虑了垂直阵2在水下所受水流的影响会发生倾斜以及对应倾斜角度。因此,本实用新型提供的水下垂直阵阵元位置测量系统,可以用于对水下垂直阵阵元位置进行测量,以提高水下垂直阵2的阵元位置测量结果的准确性。
[0096]
尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。
[0097]
显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1