一种建筑监理用大面积平整度智能检查装置的制作方法
1.本技术涉及建筑监理技术的领域,尤其是涉及一种建筑监理用大面积平整度智能检查装置。
背景技术:
2.平整度是实际物体表面与绝对水平之间数据差值。建筑施工中,混凝土浇筑后,需要对浇筑构件的平整度进行验收,验收合格后才能进行下一步的施工。
3.如公告号cn213842115u的专利公开了一种建筑监理用大面积平整度智能检查装置,其包括平板车,平板车的顶面固定有安装箱,安装箱内安装有滑板,安装箱的内壁与滑板的周侧边滑动连接,滑板沿竖直方向滑移,安装箱设置有用于带动滑板滑移的调节组件,安装箱的底部开设有贯通底壁的安装箱开口,平板车的中心开设有贯通侧壁的平板车开口,安装箱开口和平板车开口相连通,滑板靠近平板车的一侧设置有多组平整度检测装置,平整度检测装置用于与待测物体表面抵接从而检测各个抵接点的平整度。
4.上述技术通过平整度检测装置与待测物表面抵接从而检测各抵接点的平整度,其检测的基准为平板车承载于待测物表面时所形成的基准面;平板车在待测物表面行走时难免因平整度变化而出现高低起伏,导致由平板车构成的基准也在变化中,从而使平整度的检测精度难以得到保障。
技术实现要素:
5.为了提高建筑监理中的平整度检测精度,本技术提供一种建筑监理用大面积平整度智能检查装置。
6.本技术提供的一种建筑监理用大面积平整度智能检查装置采用如下的技术方案:
7.一种建筑监理用大面积平整度智能检查装置,包括基准组件和检测组件,所述基准组件包括两个用于放置于待测物表面的两侧的拉设柱,两个所述拉设柱之间拉设有索带,所述索带沿自身长度方向滑移连接有基准件;所述检测组件包括平板车,所述平板车设有用于带动基准件沿索带长度方向滑移的牵引件,所述平板车设有距离传感器,所述距离传感器用于测量自身相对所述基准件沿竖直方向的距离。
8.通过采用上述技术方案,当平板车沿索带的长度方向行走时,位于平板车的牵引件带动基准件沿索带的长度方向移动,从而使基准件与平板车同步行进;在此过程中距离传感器测量其自身相对基准件沿竖直方向的距离,通过距离传感器测量的数值变化可以获得待测物体表面的平整度情况;上述检测的过程中,基准件沿索带滑移,使基准件沿竖直方向的位置不易受到平板车的高低起伏的影响,从而有利于保障平整度的检测精度。
9.可选的,所述拉设柱包括柱体,所述柱体的下端设有座板。
10.通过采用上述技术方案,拉设柱通过座板站立于待测物的表面,因座板的表面尺寸较大,使拉设柱放置时较为平稳;当索带绷紧拉直时,索带对拉设柱具有拉力,在必要的情况下还可在座板上压放重物进行压紧,以利于使索带拉直。
11.可选的,所述座板的下表面设有橡胶阻尼层。
12.通过采用上述技术方案,通过在座板的下表面设置橡胶阻尼层,有利于减少座板相对待测物表面滑动的情况。
13.可选的,所述座板穿设有多个定位杆,所述定位杆的下端设有吸盘,所述定位杆的上端螺纹连接有螺母,所述定位杆套设有弹簧,所述弹簧位于所述座板与所述螺母之间。
14.通过采用上述技术方案,当待测物表面为光滑面时,吸盘吸附住待测物的表面,套设于定位杆的弹簧迫使座板的下表面靠近待测物的表面,从而使拉设柱不易在索带的拉力下倾斜;螺母可用于调节弹簧的弹力。
15.可选的,所述柱体的下端设有螺纹部,所述座板设有与所述螺纹部适配的螺纹孔。
16.通过采用上述技术方案,柱体与座板可拆卸连接,当平整度检测完成后,柱体与座板拆卸后分别收纳,较为方便。
17.可选的,所述索带为皮带,皮带的宽面朝水平方向,所述基准件设有供所述皮带沿竖直方向插设的插槽,所述插槽的槽口朝下设置。
18.通过采用上述技术方案,皮带呈带状,皮带的宽面朝水平方向,当基准件通过插槽与皮带插接时,基准件不易绕水平方向的轴线旋转,从而使基准件正对距离传感器一侧的表面尽可能保持稳定,以保障平整度检测精度。
19.可选的,所述索带包括至少两条丝线,两条所述丝线沿竖直方向错位设置,所述基准件设有供两条所述丝线共同沿竖直方向插设的插槽,所述插槽的槽口朝下设置。
20.通过采用上述技术方案,两条丝线同时与基准件的插槽插接,使基准线不易绕水平方向的轴线旋转。
21.可选的,两个所述拉设柱之间拉设有限位拉索,所述平板车设有限位件,所述限位件与所述限位拉索沿限位拉索的长度方向滑移连接。
22.通过采用上述技术方案,限位件与限位拉索沿限位拉索的长度方向滑移连接,使平板车受到限位拉索的导向作用,从而有利于使平板车的行进轨迹与索带的长度方向尽可能保持平行,从而使平板车尽可能保持自身与索带之间的间距稳定,以利于距离传感器对准基准件。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.距离传感器测量其自身相对基准件沿竖直方向的距离,通过距离传感器测量的数值变化可以获得待测物体表面的平整度情况;上述检测的过程中,基准件沿索带滑移,使基准件沿竖直方向的位置不易受到平板车的高低起伏的影响,从而有利于保障平整度的检测精度;
25.限位件与限位拉索沿限位拉索的长度方向滑移连接,使平板车受到限位拉索的导向作用,使平板车尽可能保持自身与索带之间的间距稳定,以利于距离传感器对准基准件。
附图说明
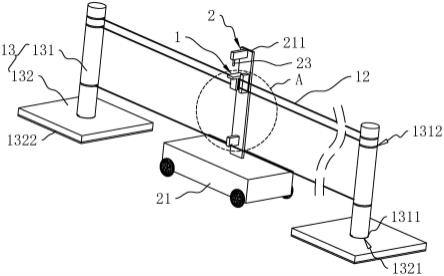
26.图1是实施例1的整体结构示意图。
27.图2是图1中a处的局部放大视图。
28.图3是实施例2用于体现定位杆与座板连接关系的剖视图。
29.图4是实施例3的整体结构示意图。
30.附图标记说明:1、基准组件;11、基准件;111、基准部;112、插设部;1121、插槽;12、索带;121、丝线;122、皮带;13、拉设柱;2、检测组件;21、平板车;211、立柱;22、牵引件;23、距离传感器;131、柱体;1311、螺纹部;1312、环槽;132、座板;1321、螺纹孔;1322、橡胶阻尼层;1323、避让槽;3、限位拉索;4、限位件;41、限位槽;51、定位杆;52、吸盘;53、螺母;54、弹簧。
具体实施方式
31.以下结合附图1-4对本技术作进一步详细说明。
32.本技术实施例公开一种建筑监理用大面积平整度智能检查装置。
33.实施例1:
34.参照图1,建筑监理用大面积平整度智能检查装置包括基准组件1和检测组件2,基准组件1包括基准件11、索带12和两个拉设柱13,两个拉设柱13分别放置于待测物表面的两侧,索带12拉设于两个拉设柱13之间,基准件11与索带12之间沿索带12的长度方向滑移连接;检测组件2包括平板车21,平板车21设有牵引件22和距离传感器23。
35.检测待测物表面的平整度时,平板车21沿索带12的长度方向行走,牵引件22带动基准件11随平板车21同步行进,在此过程中,距离传感器23测量其自身与基准件11之间沿竖直方向的距离,距离传感器23的测量数据的获取可以为外置电连接的数据处理主机。
36.参照图1和图2,拉设柱13包括柱体131和座板132,柱体131与座板132垂直,柱体131的下端设有螺纹部1311,座板132设有与螺纹部1311适配的螺纹孔1321;座板132呈方形结构,座板132的下表面设有橡胶阻尼层1322。拉设柱13通过座板132放置于待测物的表面,座板132可利用重物进行压紧,当索带12拉紧绷直时,拉设柱13不易在索带12的拉力下倾斜。
37.参照图2,基准件11包括板状的基准部111和插设部112,基准部111与插设部112互相垂直,插设部112的一侧与基准部111的中间部位连接,插设部112远离基准部111的一侧设有供索带12沿横向插接的插槽1121,插槽1121的槽口方向与基准部111的宽面垂直,当基准件11与索带12插接时,插槽1121的槽口朝下。
38.参照图2,索带12包括两条沿竖直方向错位设置的丝线121,具体可以是尼龙单丝等化纤材料,化纤材料质地较轻,不易下垂,两条丝线121的两端分别连接两个柱体131,两条丝线121同时与基准件11的插槽1121插接,使基准件11不易绕沿水平方向的轴线旋转。
39.参照图1,所述平板车21设有立柱211,牵引件22和距离传感器23均位于立柱211的上端,当平板车21沿索带12的长度方向前进时,距离传感器23保持于基准件11的上方,距离传感器23检测其自身相对基准部111远离插设部112一侧的距离。
40.参照图1和图2,两个拉设柱13之间拉设有限位拉索3,限位拉索3可使用与丝线121相同的材料,限位拉索3位于两条丝线121的下方,平板车21设有限位件4,限位件4呈杆状,限位件4水平设置,限位件4开设有限位槽41,限位件4通过限位槽41与限位拉索3沿竖直方向插接,限位拉索3抵接限位槽41的槽底,使限位件4与限位拉索3沿限位拉索3的长度方向滑移连接,限位拉索3限制住平板车21与索带12之间的距离,从而有利于保持距离传感器23与基准件11之间的位置关系。
41.参照图1和图2,每个柱体131均设有两个供丝线121和限位拉索3缠绕收卷的环槽
1312,当平整度检测工作完成后,可分别将两个拉设柱13的柱体131与座板132分离后,再将两条丝线121和限位拉索3同时缠绕到其中一个柱体131的两个环槽1312内。
42.本实施例的实施原理为:当平板车21沿索带12的长度方向行走时,基准件11在牵引件22的带动下与平板车21同步行进,在此过程中距离传感器23测量其自身相对基准件11沿竖直方向的距离,通过距离传感器23测量的数值变化可以获悉待测物体表面的平整度情况;当平板车21行走时因待测物表面平整度不良而上下起伏时,因为基准件11与索带12沿索带12的长度方向滑移连接,使基准件11沿竖直方向的位置不易受到平板车21影响,使距离传感器23的测量基准较为稳定,从而有利于保障平整度的检测精度。
43.实施例2:
44.参照图3,本实施例与实施例1的不同之处在于:座板132的四角分别穿设有定位杆51,定位杆51的下端设有吸盘52,座板132的下表面开设有四个用于避让吸盘52的避让槽1323,定位杆51的上端螺纹连接有螺母53,定位杆51套设有弹簧54,弹簧54的上端抵接螺母53,弹簧54的下端抵接座板132的上表面。
45.当待测物的表面为光滑面时,可使吸盘52吸附待测物的表面,接着螺旋转动螺母53,使弹簧54受压从而迫使座板132抵紧待测物的表面,使座板132受到定位。
46.实施例3:
47.参照图4,本实施例与实施例1的不同之处在于:索带12为皮带122,皮带122的宽面朝水平方向,基准件11通过插槽1121与皮带122插接,使基准件11与皮带122沿皮带122的长度方向滑移连接,皮带122的宽面朝水平方向,较为不易下垂。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1